 Bumblebee X 立體相機提升工業自動化中的立體深度感知
Bumblebee X 立體相機提升工業自動化中的立體深度感知
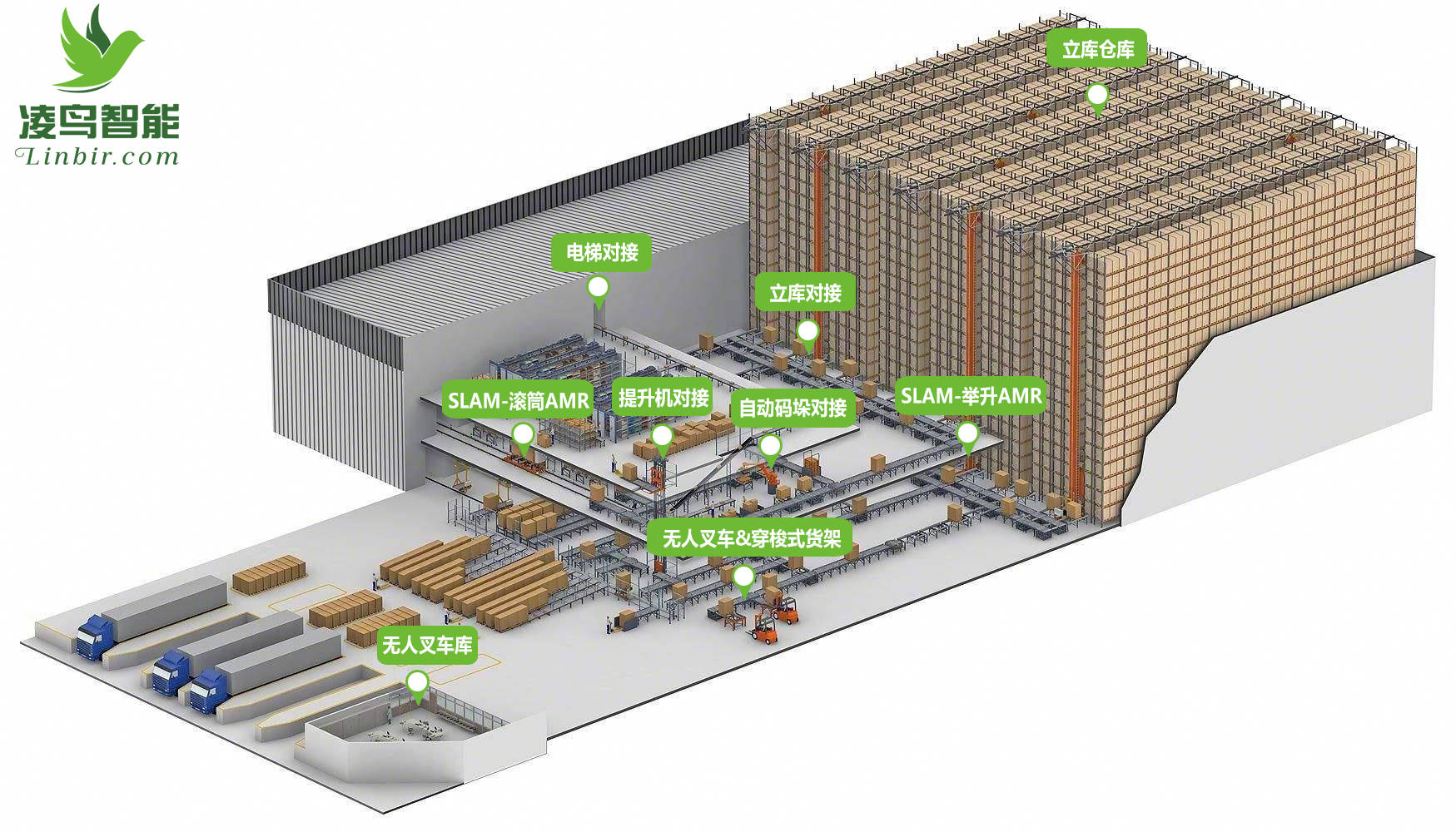
深度感知對倉庫機器人應用至關重要,尤其是在自主導航、物品拾取與放置、庫存管理等方面。
通過將深度感知與各種類型的3D數據(如體積數據、點云、紋理等)相結合,倉庫機器人可以在錯綜復雜環境中實現自主導航,物品檢測,靈活避開障礙物,精準拾取目標物品,將其準確無誤地放置在特定位置,同時有效優化倉庫空間布局,提升作業效率。
倉儲應用
3D視覺技術
3D傳感器是支持現實場景深度感知測量的基礎技術。常見的3D視覺技術如立體相機、激光雷達、渡越時間相機和激光三角測量。
3D技術的選擇取決于具體的應用和需求,每項技術都有其獨特的優勢。例如,激光雷達和激光三角測量技術,由于內置諸如旋轉鏡等運動部件,因此不適合在惡劣環境中使用。
立體相機不易受到陽光直射的干擾更適合戶外應用場景。立體相機的成本通常低于其他3D傳感器。立體相機在計算圖像中的3D數據時,相較于上述其他技術,需要更高的計算能力。部分立體相機配備了板載處理能力,從而減輕主機的數據處理負擔。
此外,在某些應用場景下,物體的識別依賴于彩色圖像,而彩色點云則能提供更豐富的情境感知。相較于其他常見的3D視覺技術需要額外配備彩色相機,立體相機則能提供彩色圖像與彩色點云。
這往往是在范圍與精度之間做出的一種權衡考量。例如,遠程傳感器的精度相對較低,而短距離傳感器則具有較高的精度。在測距能力方面,激光雷達具備最遠的測距能力,其次是立體相機,最后是渡越時間傳感器。激光三角測量的覆蓋范圍雖然最短,但其精度卻更高。自主導航和障礙避讓功能需要較長的探測范圍,而物品拾取與放置操作只需中等范圍的覆蓋即可。近距離范圍探測主要用于物體的識別與檢查。
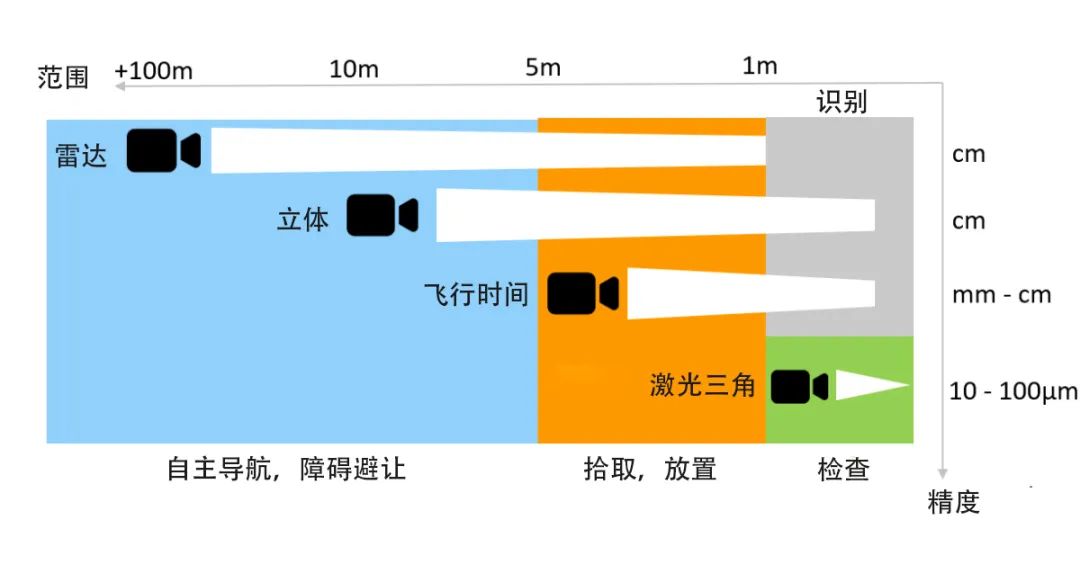 · 各種3D視覺技術范圍和精度的平衡 ·
· 各種3D視覺技術范圍和精度的平衡 ·
立體技術廣泛適用于大多數倉庫機器人的應用場景。它能提供靈活的覆蓋范圍和足夠的精度性能。它擁有較低的成本優勢,能夠輕松適應惡劣環境條件,同時提供物體識別所需的彩色圖像。
立體成像概述
立體成像技術模擬人類視覺中的3D感知原理。人類的雙眼從兩個不同視角觀察同一場景,可以通過視差(即兩個不同視角下物體位置的位移)推斷出距離。
在立體成像系統投入使用前,必須進行一次性相機校準,在每一幀圖像中,相機首先捕捉原始的左右圖像,隨后,在矯正步驟中,使用前期校準得到的信息。經過矯正的圖像被傳遞至立體匹配步驟,生成視差圖。最后,通過三角測量步驟將視差圖轉換為3D點云。
立體相機的關鍵設計驅動因素是3D精度。深度誤差由以下公式得出:ΔZ d。它取決于以下因子:
“Z” = 范圍
“B” = 基線,即兩臺相機之間的距離
“f”= 像素中的焦距,與相機視野及圖像分辨率相關。
基于此公式,深度誤差隨范圍的增加而呈二次方增長。這是立體相機在遠距離操作中面臨的一個主要局限性。為了減少誤差,我們可以采取多種措施,例如延長基線長度、提高分辨率或縮小視野范圍。
立體工業相機的應用
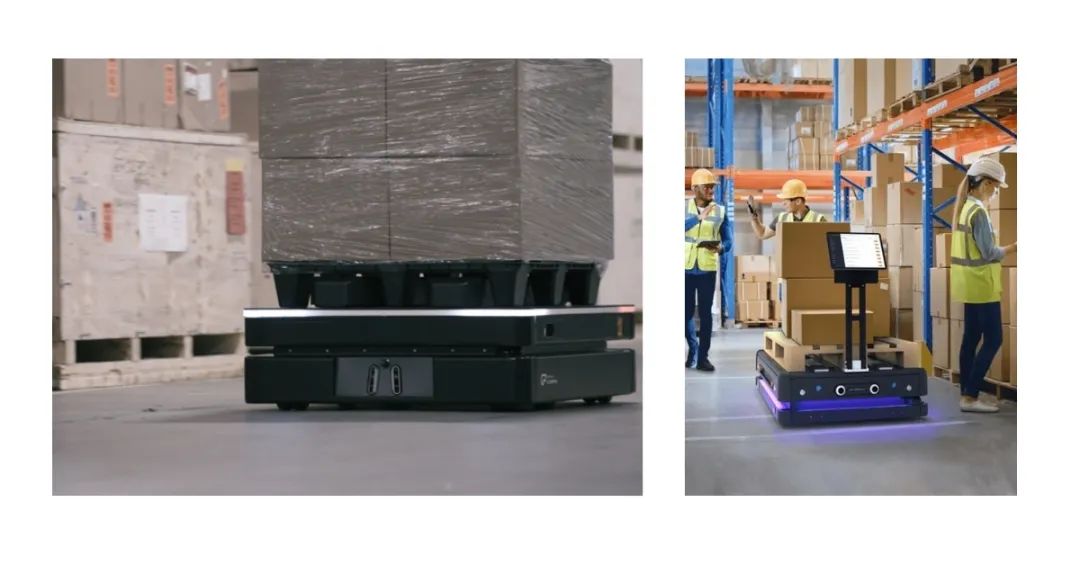
使用自主移動機器人(AMR)的倉庫機器人技術
深度感知對倉庫機器人應用至關重要,尤其是在自主導航、物品拾取與放置、庫存管理等方面。
通過將深度感知與各種類型的3D數據(如體積數據、點云、紋理等)相結合,倉庫機器人可以在錯綜復雜環境中實現自主導航,物品檢測,靈活避開障礙物,精準拾取目標物品,將其準確無誤地放置在特定位置,同時有效優化倉庫空間布局,提升作業效率。
自主移動機器人(AMR)應用中標準立體相機的特征:
高幀率
低延遲
堅固可靠
校準保留
寬視野
遠距離工作能力
適用于室內外的高動態范圍
使用拾取與放置機器人的倉庫機器人技術
立體相機倉庫機器人另一個應用是拾取與放置作業,這類機器人能夠精準地拾取零件或物品,并將其放置到其他位置。
該應用的關鍵組件包括一個用于感知周圍環境的視覺系統、一個用于數據處理制定決策的控制系統,以及一個帶有夾具或吸盤用于操控各種物體的機器人手臂。
相較于人工拾取與放置,這類機器人的優勢主要體現在其更高的準確性和一致性上。它們具備出色的環境適應性,能夠靈活應對各種變化,同時高效執行重復性任務,從而釋放人力,使之投入到更為復雜的作業中,最終推動生產力和效率的雙重提升。
拾取與放置機器人應用廣泛,涵蓋裝配、托盤化、去托盤化和箱子拾取等多個領域。以箱子拾取為例,其目標是從容器中移除隨機放置的物體。首先,視覺系統需要識別和定位物體,隨后計算其方位,確保夾具能夠正確拾取。然后,控制系統規劃出機器人的移動路徑,有效避開途中的障礙物。最后,機器人順利拾起物體,并將其放置于指定位置。
自拾取與放置機器人應用中標準立體相機的特征:
低延遲
堅固可靠
校準保留
揚塵/潮濕的工業環境
針對不同大小的物體,需要在視野和工作距離上具備靈活性。
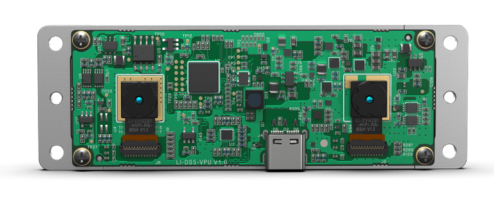
Bumblebee X 立體相機賦能工業自動化
新一代的Bumblebee X 立體相機,提供高分辨率、優異的精度和先進的板載處理能力。此外,其出色的工業設計、IP67 防護等級和5GigE 接口確保其能穩定集成在工業環境中。
Bumblebee X 的主要特點包括:
高分辨率與高精度
利用強大的立體算法的板載處理
24cm基線的遠距離工作
靈活的視野選項(60、80 和 105 度)
具備IP67工業設計的高可靠性和堅固性
具備5G網口接口的高帶寬和低延遲
長時間的校準保留
兼容外部圖案投影儀
產品生命周期長
SDK功能豐富且易用
-
工業自動化
+關注
關注
17文章
2313瀏覽量
67183 -
3D視覺
+關注
關注
4文章
430瀏覽量
27493 -
立體相機
+關注
關注
0文章
6瀏覽量
3818
發布評論請先 登錄
相關推薦
工業自動化的發展歷程與未來趨勢
CAN總線在工業自動化中的應用
邊緣計算在工業自動化中的應用
立體視覺新手必看:英特爾? 實感? D421深度相機模組
英德斯工控主板助力工業自動化升級
藍牙模塊在工業自動化中的應用
工業自動化和自動化區別是什么
工業自動化包含哪些技術
新品 | Bumblebee X系列用于高精度機器人應用的新型立體視覺產品

Teledyne FLIR IIS推出一款用于高精度機器人的新型立體視覺產品
AGV在立體倉庫中的路徑規劃





 工商網監
工商網監
評論