") 三分鐘讓你明白拖動(dòng)示教噴涂機(jī)器移動(dòng)速度是多少
三分鐘讓你明白拖動(dòng)示教噴涂機(jī)器移動(dòng)速度是多少
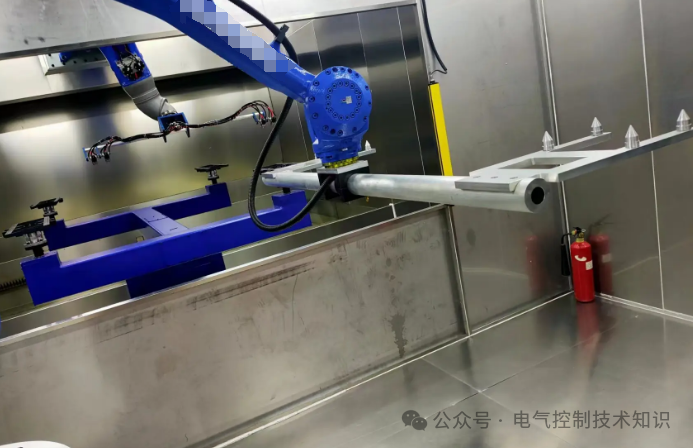
拖動(dòng)示教噴涂機(jī)器移動(dòng)速度是多少,在工業(yè)噴涂領(lǐng)域,拖動(dòng)示教噴涂機(jī)器因其高效、精準(zhǔn)的噴涂效果而備受青睞。然而,對(duì)于許多人來(lái)說(shuō),這種機(jī)器的移動(dòng)速度可能是一個(gè)謎。接下來(lái)給大家介紹拖動(dòng)示教噴涂機(jī)器的移動(dòng)速度。
拖動(dòng)示教技術(shù)簡(jiǎn)介
拖動(dòng)示教技術(shù),是一種創(chuàng)新的機(jī)器人編程方法,它允許操作人員直接通過(guò)拖動(dòng)噴涂機(jī)器人的末端執(zhí)行器(如噴槍?zhuān)瑏?lái)指導(dǎo)機(jī)器人完成特定的噴涂任務(wù)。這一技術(shù)極大地簡(jiǎn)化了編程過(guò)程,無(wú)需編寫(xiě)復(fù)雜的代碼或使用專(zhuān)業(yè)軟件,使得非專(zhuān)業(yè)人員也能輕松上手。
噴涂機(jī)器人的移動(dòng)速度控制
拖動(dòng)示教噴涂機(jī)器人的移動(dòng)速度,是影響噴涂質(zhì)量和效率的關(guān)鍵因素之一。其速度控制通常通過(guò)程序設(shè)定和傳感器反饋來(lái)實(shí)現(xiàn)。
程序設(shè)定:操作人員可以根據(jù)實(shí)際需求,在機(jī)器人的控制系統(tǒng)中設(shè)定噴涂速度。大多數(shù)噴涂機(jī)器人都配備有直觀(guān)易用的操作界面,通過(guò)點(diǎn)擊或旋轉(zhuǎn)相應(yīng)的按鈕或旋鈕,可以逐步調(diào)整噴涂速度。一般來(lái)說(shuō),向上或向右調(diào)節(jié)會(huì)增加速度,向下或向左調(diào)節(jié)則會(huì)減慢速度。
傳感器反饋:為了確保速度的穩(wěn)定性和準(zhǔn)確性,噴涂機(jī)器人還配備了多種傳感器,如位置傳感器、速度傳感器等。這些傳感器實(shí)時(shí)監(jiān)測(cè)機(jī)器人的運(yùn)動(dòng)狀態(tài),并將數(shù)據(jù)反饋給控制系統(tǒng),進(jìn)行動(dòng)態(tài)調(diào)整。
智能學(xué)習(xí)與優(yōu)化:智能拖動(dòng)示教噴涂機(jī)器人還具備一定的智能學(xué)習(xí)能力。通過(guò)對(duì)大量噴涂案例的學(xué)習(xí)和分析,機(jī)器人能夠根據(jù)不同物體的形狀和大小,自主調(diào)整噴涂參數(shù),包括移動(dòng)速度,以提高噴涂的準(zhǔn)確性和效率。
 拖動(dòng)示教噴涂控制系統(tǒng)DMC600MD
拖動(dòng)示教噴涂控制系統(tǒng)DMC600MD
實(shí)際應(yīng)用中的速度表現(xiàn)
在實(shí)際應(yīng)用中,拖動(dòng)示教噴涂機(jī)器人的移動(dòng)速度會(huì)根據(jù)噴涂任務(wù)的具體要求進(jìn)行調(diào)整。例如,在噴涂大面積平面時(shí),機(jī)器人可能會(huì)以較快的速度進(jìn)行噴涂,以提高效率;而在噴涂復(fù)雜曲面或精細(xì)圖案時(shí),則會(huì)適當(dāng)降低速度,以確保噴涂質(zhì)量。
此外,拖動(dòng)示教噴涂機(jī)器人還具備路徑規(guī)劃和快速運(yùn)動(dòng)的能力。通過(guò)視覺(jué)引導(dǎo)技術(shù),機(jī)器人能夠精確規(guī)劃噴涂路徑,實(shí)現(xiàn)快速而穩(wěn)定的移動(dòng),從而在保證噴涂質(zhì)量的同時(shí),提升整體噴涂效率。

綜上所述,拖動(dòng)示教噴涂機(jī)器的移動(dòng)速度,是其高效、精準(zhǔn)噴涂能力的重要體現(xiàn)。通過(guò)先進(jìn)的程序設(shè)定、傳感器反饋和智能學(xué)習(xí)技術(shù),機(jī)器人能夠根據(jù)不同任務(wù)需求,靈活調(diào)整移動(dòng)速度,實(shí)現(xiàn)高效、高質(zhì)量的噴涂作業(yè)。
原文標(biāo)題:三分鐘讓你明白拖動(dòng)示教噴涂機(jī)器移動(dòng)速度是多少
文章出處:【微信公眾號(hào):電氣控制技術(shù)知識(shí)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
-
變頻器
+關(guān)注
關(guān)注
251文章
6510瀏覽量
144296
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
示教器的革新:無(wú)線(xiàn)連接,無(wú)限可能

什么是拖動(dòng)示教?機(jī)器人拖動(dòng)示教方式分析

協(xié)作機(jī)器人拽拖示教詳解
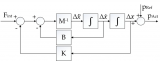
基于導(dǎo)納控制的機(jī)器人拖動(dòng)示教原理和實(shí)現(xiàn)步驟
焊接機(jī)器人示教模式怎么設(shè)置

工業(yè)機(jī)器人示教器按鈕功能介紹
還不會(huì)嗎?三分鐘讓你速通Printf~

MT6701磁編碼IC在關(guān)節(jié)型噴涂機(jī)器人領(lǐng)域中的應(yīng)用
Node-RED初學(xué)者教程-三分鐘學(xué)習(xí)
工業(yè)機(jī)器人示教器可以通用嗎?給你5點(diǎn)建議
三分鐘了解飛創(chuàng)直線(xiàn)電機(jī)運(yùn)動(dòng)模組特點(diǎn)、選型及應(yīng)用-FCL系列

直線(xiàn)模組在噴涂機(jī)器中的應(yīng)用
基于導(dǎo)納控制的機(jī)器人拖動(dòng)示教原理和實(shí)現(xiàn)步驟





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論