 思嵐科技SLAMTEC Aurora在機器狗上的應用
思嵐科技SLAMTEC Aurora在機器狗上的應用
大家好!此前我們提到過會放出更多測試視頻,現在這些測評開始陸續和大家見面。
在具身智能時代,人形機器人、四足狗正以驚人的速度奔跑,但它需要一雙敏銳的眼睛去幫它們看清、理解環境。
今天,小嵐將為你揭秘SLAMTEC Aurora——具身智能的“完美搭檔”,如何在室外廣闊天地中為他們提供精準的3D定位導航,并繪制出完美的地圖。
我們都知道,多足機器人由于其特點,在使用空間定位上存在一些新的挑戰:
現如今,大多數具身智能機器人采用足式設計而非輪式,在行走中就帶來了較大顛簸以及傾斜問題,使得傳統的里程計和傳統算法無法適用,就算多線雷達也難以解決這種情況。
而且,具身智能大多在室外或復雜的室內環境中工作。拿機器狗來說,需要具備環境感知能力,才能像生物狗一樣探索周圍世界、避開障礙物。同時機器人還會有坐立、站立等多種姿態,此時就必須依靠3D定位和建圖技術。
此外,具身智能對于設備的尺寸和穩定性也有特殊要求,車載方案往往體積較大,所以導致目前現有方案很難有合適的。
針對這些問題,今天,我們將深入測評SLAMTEC Aurora 搭載機器狗的建圖能力,看看這個強大的組合在面對各種復雜環境時的表現如何吧~
我們把Aurora安裝到機器狗上,發現它可以完整的跑完整個室外環境,并穩定建圖,最終的建圖面積285m*163m。
我們再來關注其中的一些細節:
應對高低起伏地面
我們都知道在室外場景,地面并不是一直平坦的,充滿不同高低起伏,傳統的方案難以應對。
我們讓機器狗在長47.5米,坡度為11%的斜坡上行走建圖,在面對斜坡時,Aurora的系統能夠準確感知坡度變化,確保地圖的準確性。
及時有效地閉環檢測能力
Aurora系統帶有基于深度學習的閉環檢測功能,在建圖過程中,無論環境多大,都可以在第一時間找到閉環點,從而修正地圖,因此可以實現非常復雜的場景建圖和定位。
深度學習加持,無懼光線變化
環境光照是在室外工作中一定會遇到的挑戰,它對于視覺VSLAM來說尤其困難。Aurora采用了思嵐自研的相機系統,從底層曝光控制和成像部分就做了細節調教,并且得益于深度學習方案,可以在環境光強烈變化時,也能穩定工作。
面對環境干擾毫不退縮
最后,在魯棒性測評中,Aurora面對各種環境干擾也毫不退縮。機器狗和人形機器人在工作中會出現強烈的震動,這和傳統輪式機器人以及汽車不同。
Aurora系統能夠迅速調整平衡,繼續進行建圖工作。
并且在工作中,難免遇到行人遮擋、環境變化。Aurora可以自動識別出動態物體,并從建圖定位中剔除,從而穩定工作。
整個測試過程,我們只是簡單的把Aurora裝到機器狗上,不需要額外開發調試,就實現了功能。Aurora同步輸出2D地圖,可以很容易供后續路徑規劃算法使用。
SLAMTEC Aurora 搭載機器狗的建圖能力令人印象深刻,無論是在復雜的地形、多變的光照條件還是各種環境干擾下,它都能展現出卓越的性能。
這個完美的組合為具身智能的發展帶來了新的機遇,為具身智能擦亮了“慧眼”,讓我們期待它在未來的更多精彩表現吧~
-
機器人
+關注
關注
210文章
28191瀏覽量
206505 -
定位導航
+關注
關注
1文章
27瀏覽量
4327 -
思嵐科技
+關注
關注
2文章
75瀏覽量
5192
原文標題:你所期待的SLAMTEC Aurora|具身智能的完美搭檔,準備好遛超酷“機器狗”了嗎?
文章出處:【微信號:slamtec-sh,微信公眾號:思嵐科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
【米爾-Xilinx XC7A100T FPGA開發板試用】+04.SFP之Aurora測試(zmj)
特朗普啟用帶激光雷達機器狗巡邏
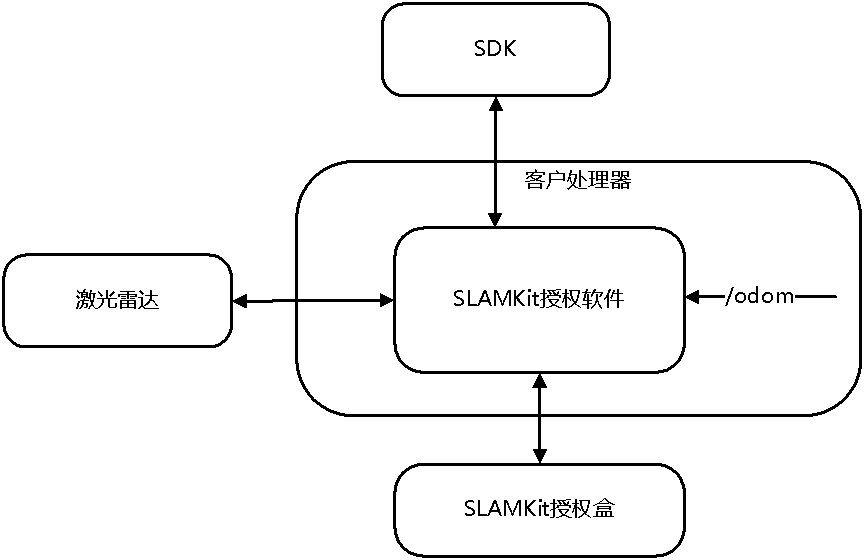
思嵐科技SLAMKit定位與建圖解決方案介紹
思嵐科技推出新一代圓形通用機器人底盤Apollo2.0
思嵐科技S2L激光雷達在ROSLander機器人上的作用
連做兩只機器狗,終于拿捏了這些算法……

為什么四足機器人設計常借鑒狗的外形特征?
制作一只3D打印的遙控機器狗
華為與東風嵐圖簽署戰略合作,推動汽車工業高質量發展
思嵐科技榮獲“樓宇黑科技TOP10”,助力智慧樓宇新變革

英飛凌攜手Aurora Labs為汽車行業提供優化的預測性維護解決方案

【鴻蒙千帆起】《鋼嵐》成為首款基于HarmonyOS NEXT開發的戰棋新游
思嵐科技憑借“智能巡檢機器人”成功入選商業社區服務領域標桿企業





 工商網監
工商網監
評論