 手把手教你搭建OpenDRIVE道路模型(上)
手把手教你搭建OpenDRIVE道路模型(上)
OpenDRIVE作為一種高度專業化的道路建模標準格式,采用XML數據語言構建,其核心優勢在于能夠精確且詳盡地刻畫道路網絡的幾何特征,包括但不限于車道寬度、曲率、坡度以及道路交叉口的復雜布局。它不僅涵蓋了基礎的道路元素,還深入到了交通基礎設施的細節層面,如交通標志的位置與類型、交通信號燈的相位與時序、道路表面的材質與摩擦系數等,為自動駕駛算法和高級駕駛輔助系統(ADAS)提供了全面且精確的環境感知基礎。
此外,OpenDRIVE支持靈活的道路網絡拓撲結構定義,能夠處理環路、分支、合并等多種復雜道路形態,并通過層次化的節點和鏈接設計,有效管理大規模道路數據的組織與訪問。這種結構化的建模方式簡化了自動駕駛系統對復雜交通場景的理解與應對,提升了系統的安全性、可靠性與適應性。
在自動駕駛技術的研發與驗證階段,OpenDRIVE格式的數據被廣泛應用于仿真測試平臺的搭建,幫助開發者在虛擬環境中對算法進行高效迭代與優化,從而加速自動駕駛技術的商業化進程,推動汽車行業向更加智能化、自主化的未來發展。
經緯恒潤動力學仿真軟件ModelBase遵循國際道路標準OpenDRIVE標準,開發內嵌了道路編輯器,可用于對仿真測試過程中的車輛行駛工況進行搭建。從搭建的形式上,軟件支持通過導入OpenDRIVE格式文件來自動生成道路,然后可利用道路編輯器在此基礎上進行編輯修改,或是從零開始進行道路模型的創建。當然,編輯后的道路模型也可以OpenDRIVE格式對外導出使用。
下面我們來一起看一下道路編輯器的功能和操作使用方法,道路編輯器的操作界面如圖1所示。
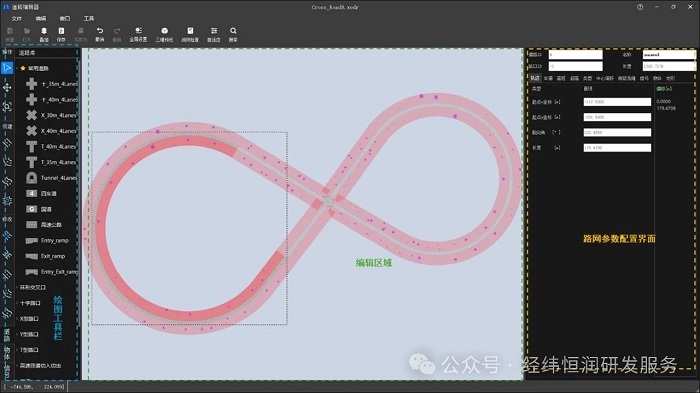
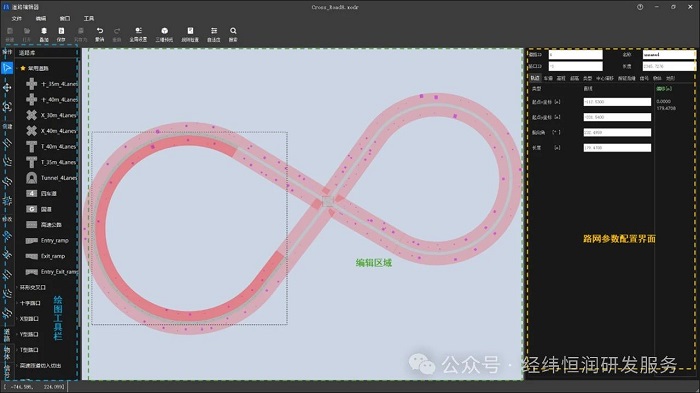
圖1 道路編輯器操作界面
繪制工具欄
通過鼠標左鍵單擊可實現對工具欄中不同功能按鈕間的切換,這些功能包括以下多種選擇。
- 選擇
用于對編輯區域內的Road、Junction、Signal和Object等進行選中,然后用于在右側的參數配置界面對這些元素進行詳細的特征編輯,或是進行復制粘貼、刪除等操作。
- 移動旋轉
在選中編輯區域內的Road、Signal和Object等元素,可通過拖拽形式對其位置進行移動,或結合右側的路網參數配置窗口以參數輸入形式對元素的位置和角度進行調整。
- 局部放大
用于在編輯區域內對添加后的元素進行放大顯示。
- 創建直路
用于實現在編輯區域內進行直路的創建。在具體操作時,用鼠標左鍵在編輯區域內單擊點下第一個點作為直路的起點,移動鼠標,此時在第一個點和鼠標移動點之間會出現一條黑色直虛線(直路中心線位置預覽),當再次單擊點下第二個點作為直路的終點后,一條直路便繪制完成了。
- 創建圓弧路
用于實現在編輯區域內進行圓弧路的創建。在具體操作時,用鼠標左鍵在編輯區域內單擊點下第一個點作為圓弧路的起點,移動鼠標,此時在第一個點和鼠標移動點之間會出現一條黑色直虛線(圓弧路起點位置切線方向預覽),當確定好切線角度并再次點擊鼠標左鍵后,在第一個點和鼠標位置之間將會出現一條黑色圓弧形虛線(圓弧路中心線位置預覽),當單擊點下第三個點作為圓弧路的終點后,一條圓弧路便繪制完成了。
- 創建樣條路
用于實現在編輯區域內進行任意形狀樣條路的創建。在具體操作時,用鼠標左鍵在編輯區域內單擊點下第一個點作為樣條路的起點,移動鼠標,此時在第一個點和鼠標移動點之間會出現一條黑色直線(該段樣條路中心線位置預覽),然后可再次單擊點下第二個點作為道路的拐點位置,此時可繼續移動鼠標,第二點和鼠標移動點之間同樣會出現一條黑色直線。可依此重復操作,使樣條路不斷被延長,當想結束繪制時,單擊鼠標右鍵即可退出編輯并得到一條樣條路。
- 創建路口
用于進行交通路口的創建。在具體操作時,用鼠標左鍵在編輯區域內待添加路口附近單擊點下第一個點,然后移動鼠標,在第一個點和鼠標移動點之間出現一個黑色矩形框,令矩形框囊括路口涉及路段后,可再次單擊點下第二個點來確定矩形框的大小,隨后可基于選擇按鈕對路口中道路的車道按實際需求進行連接。

- 自定義編輯道路配置
? 添加直路:用于對已創建好的直路/圓弧路/樣條路以直路的形式進行延長
? 添加圓弧路:用于對已創建好的直路/圓弧路/樣條路以圓弧路的形式進行延長
? 添加樣條路:用于對已創建好的直路/圓弧路/樣條路以樣條路的形式進行延長
? 合并道路:用于對兩條不同道路路段進行前后連接合并
? 切割道路:功能與合并道路相反,用于將道路分割成多個路段
路網參數配置
在基于工具欄完成道路形狀樣式的繪制后,可通過“選擇”按鈕選中編輯區域內的Road、Signal和Object等元素,在界面右側的路網參數配置窗口對更加詳細的特征參數進行具體查看和編輯,包括以下幾點。
- 軌跡
用于不同樣式道路的中心軌跡進行查看或編輯,其中包括:
? 直路:可查看和修改道路起點的X、Y坐標,以及道路的航向角和長度
? 圓弧路:可查看和修改道路起點的X、Y坐標和切線方向的航向角,以及圓弧路的長度和轉彎半徑
? 樣條路:可查看道路起點的X、Y坐標和切線方向的航向角,以及道路長度和形狀擬合多項式系數
- 車道
用于對道路進行車道顆粒度的特征編輯,可編輯參數包括車道的類型、寬度、高度、最大行駛速度和附著系數,以及車道線樣式等。
- 高程
可結合偏移量對道路中選定路段的高程值進行設置,進而實現對道路坡度的編輯。
- 超高
結合偏移量對道路中選定路段的側傾角進行設置。
- 類型
可用于對道路的類型參數(如最大車速)進行設置。
- 中心偏移
可結合偏移量對道路中選定路段的中心線偏移量進行設置。
- 前驅后繼
用于對選定道路的前驅和后繼道路類型、ID進行查看。
- 地形
用于對道路兩側進行平原、高山、森林、山區、耕地和建筑等地形環境的添加,并可對添加區域范圍進行編輯。
以上是使用ModelBase搭建OpenDRIVE道路的操作說明,如何進一步豐富實現靜態場景,敬請關注《手把手教你搭建OpenDRIVE道路模型(下)》
ModelBase是經緯恒潤自主研發的綜合駕駛測試仿真軟件,具備車輛動力學模型及智能駕駛場景仿真能力,可用于乘用車、商用車的整車電控系統、ADAS系統的設計、測試和驗證。可以覆蓋電控系統的整個開發周期,包括早期的算法仿真測試(MIL/SIL),控制器的硬件在環測試(HIL),半實物臺架測試(如電機臺架、動力系統臺架、整車臺架等),以及車輛在環測試(VIL)。
ModelBase軟件可免費申請試用,只需要發送【姓名、聯系電話、郵箱、公司/學校名稱、部門/院系、申請版本(動力學版本/智能駕駛版本)】信息到market_dept@hirain.com即可。
-
仿真
+關注
關注
50文章
4048瀏覽量
133431 -
Drive
+關注
關注
0文章
30瀏覽量
16364 -
道路模型
+關注
關注
0文章
2瀏覽量
5618 -
動力學建模
+關注
關注
0文章
3瀏覽量
938
發布評論請先 登錄
相關推薦
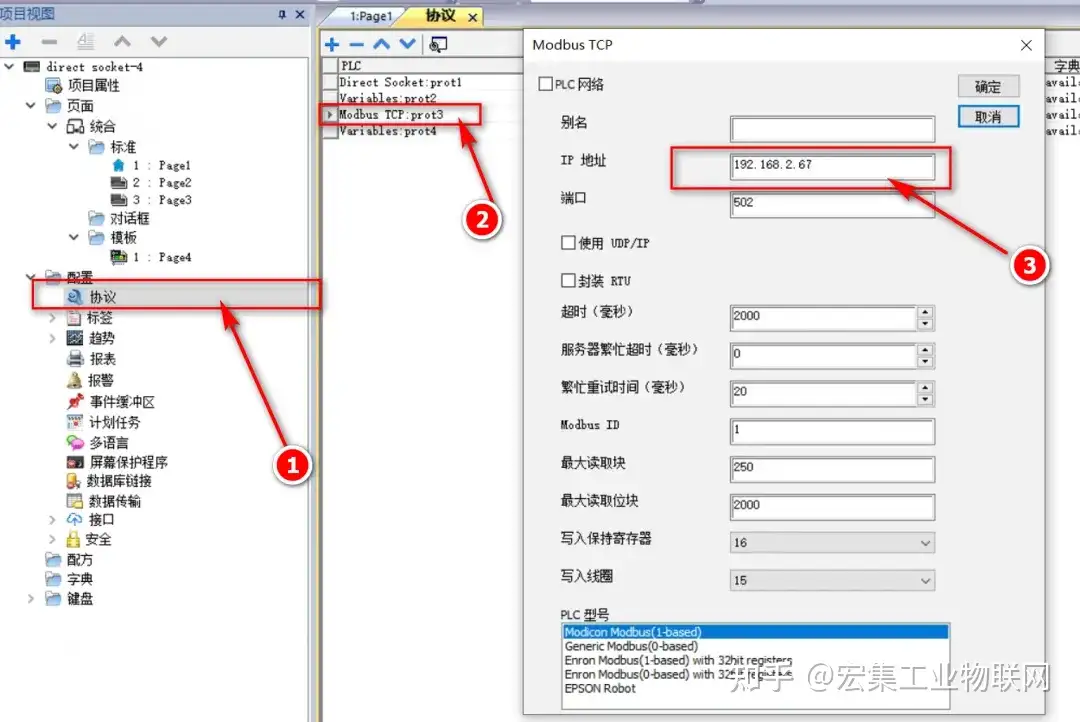
手把手教你通過宏集物聯網工控屏&網關進行協議轉換,將底層PLC/傳感器的數據轉換為TCP協議并傳輸到用戶
手把手教你在orcad中設置CIS元器件數據庫,提高工作效率

手把手教你使用物模型連接DDSU電表

手把手教你排序算法怎么寫

手把手帶你移植HAL庫函數
手把手教你PCB上怎么畫GND?

無刷電機無感FOC控制培訓系列課程
【先楫HPM5361EVK開發板試用體驗】(原創)5.手把手實戰AI機械臂
【飛騰派4G版免費試用】4.手把手玩轉QT界面設計
使用DPort-ECT搭建EtherCAT從站step by step

工程送樣!手把手教你用好廣和通RedCap模組FG131&amp;FG132系列

【飛騰派4G版免費試用】3.手把手玩轉制作rootfs根文件系統
手把手教你制作DAPLink

PCB上怎么畫GND?手把手教你畫“GND”






 工商網監
工商網監
評論