 PID控制中的反饋機制解析
PID控制中的反饋機制解析
在現代工業自動化和過程控制中,PID控制器是最為常見和有效的控制策略之一。它通過比例(P)、積分(I)和微分(D)三個基本控制作用的組合,實現了對系統動態特性的有效控制。
一、PID控制的基本概念
PID控制器的名稱來源于其三個核心控制參數:比例(Proportional)、積分(Integral)和微分(Derivative)。這三個參數共同作用于控制器的輸出,以減少系統輸出與設定值(參考值)之間的偏差。
- 比例(P)控制 :比例控制是PID控制的基礎,它根據當前偏差的大小來調整控制量。比例增益(Kp)是比例控制的核心參數,它決定了偏差對控制輸出的影響程度。
- 積分(I)控制 :積分控制作用于偏差的累積,它能夠消除穩態誤差,使系統輸出最終能夠達到設定值。積分增益(Ki)決定了積分項對控制輸出的貢獻。
- 微分(D)控制 :微分控制預測偏差的變化趨勢,通過提前調整控制量來減少系統的超調和振蕩。微分增益(Kd)控制微分項對控制輸出的影響。
二、PID控制的反饋機制
PID控制的反饋機制是其核心,它確保了系統的穩定性和響應速度。反饋機制包括以下幾個步驟:
- 偏差計算 :系統的實際輸出與設定值之間的差異稱為偏差。偏差是PID控制器工作的基礎,控制器根據偏差的大小和變化趨勢來調整控制量。
- 比例作用 :比例控制根據當前偏差的大小來調整控制量。比例作用是即時的,它能夠快速響應偏差,但單獨使用時可能會導致系統不穩定。
- 積分作用 :積分控制作用于偏差的累積,它能夠消除穩態誤差。積分項的累加效應使得控制器能夠持續調整控制量,直到偏差消除。
- 微分作用 :微分控制預測偏差的變化趨勢,通過提前調整控制量來減少系統的超調和振蕩。微分項能夠提高系統的響應速度和穩定性。
- 控制量調整 :PID控制器將比例、積分和微分三個作用的輸出相加,得到最終的控制量。這個控制量被用來調整系統的輸入,以減少偏差。
三、PID控制的參數調整
PID控制器的性能很大程度上取決于其參數的調整。參數調整是一個試錯的過程,需要根據系統的動態特性和控制目標來確定。
- 比例增益(Kp) :比例增益決定了控制器對偏差的敏感度。增益過高可能導致系統超調和振蕩,過低則可能導致響應速度慢和穩態誤差。
- 積分增益(Ki) :積分增益決定了控制器消除穩態誤差的能力。增益過高可能導致系統響應過慢,過低則可能導致穩態誤差無法消除。
- 微分增益(Kd) :微分增益決定了控制器預測偏差變化趨勢的能力。增益過高可能導致系統對噪聲敏感,過低則可能無法有效減少超調和振蕩。
四、PID控制的應用
PID控制因其簡單、高效和魯棒性而被廣泛應用于各種工業和過程控制領域。
- 溫度控制 :在化工、食品加工等行業中,PID控制器被用來精確控制溫度,以保證產品質量和生產安全。
- 流量控制 :在水處理、石油化工等領域,PID控制器用于控制流體的流量,以滿足生產需求。
- 壓力控制 :在氣體輸送、壓縮機控制等場合,PID控制器能夠維持恒定的壓力,保證系統的穩定運行。
- 位置控制 :在機械臂、輸送帶等自動化設備中,PID控制器用于精確控制位置,提高生產效率。
五、PID控制的局限性與改進
盡管PID控制具有廣泛的應用,但它也有一些局限性,如對復雜系統的適應性差、參數調整困難等。為了克服這些局限性,研究者們提出了多種改進方法:
- 自適應PID控制 :通過在線調整PID參數,使控制器能夠適應系統參數的變化。
- 模糊PID控制 :結合模糊邏輯,提高控制器對不確定性和非線性系統的處理能力。
- 神經網絡PID控制 :利用神經網絡的學習能力,實現對復雜系統的自適應控制。
六、結論
PID控制作為一種經典的反饋控制策略,其反饋機制是確保系統穩定運行的關鍵。通過合理調整PID參數,可以有效地控制各種工業過程。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
參數
+關注
關注
11文章
1791瀏覽量
32110 -
PID控制
+關注
關注
10文章
460瀏覽量
40047 -
工業自動化
+關注
關注
17文章
2313瀏覽量
67182
發布評論請先 登錄
相關推薦
初步解析飛思卡爾控制電機PID算法代碼
分享一篇在其他地方看的分享的飛思卡爾控制電機PID算法代碼解析的,寫得非常的好。PID實指“比例proportional”、“積分integral”、“微分derivative” ,
發表于 11-04 11:59
PID算法有點不懂,,反饋的控制量這么用正確嗎?
問題!!!---------------------------------------下面是一些關鍵性的代碼附件有源程序這是PID算法部分PID處理后的控制量反饋到rout處,在這里
發表于 08-04 17:26
PID控制中如何整定PID參數
可以得到各種輸出響應特性,也就是說,通過適當給定PID參數,大多數的控制任務都可以由PID完成。本文根據經典PID控制理論,結合玖陽自動化科
發表于 06-01 10:28
?65次下載
深度解析Asp.Net2.0中的Callback機制
深度解析Asp.Net2.0中的Callback機制(ups電源技術維修)-該文檔為深度解析Asp.Net2.0中的Callback
發表于 09-27 16:28
?1次下載

PID控制器的含義
器。 PID控制,當今的閉環自動控制技術都是基于反饋的概念以減少不確定性。反饋理論的要素包括三個部分包括測量、比較和執行。測量關鍵的是被控變
發表于 03-09 14:22
?3686次閱讀
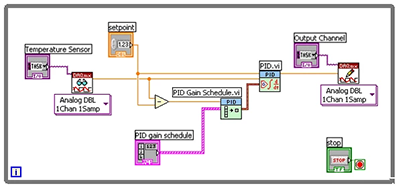
LabVIEW中PID控制的的高級功能
發展到控制具有復雜動力學的系統。在現實世界中,所有系統都具有非線性組件,因此在使用PID等經典反饋控制時存在一些挑戰。借助增益調度和級聯





 工商網監
工商網監
評論