 10BASE-T1S在工業和汽車中的應用方案
10BASE-T1S在工業和汽車中的應用方案
10BASE-T1S是實現工業4.0、汽車 IVN和智能建筑中邊緣設備全以太網化的缺失環節,可與促進人工智能和機器學習的100/1000BASE-T1以太網主干網對接。這是因為10BASE-T1S可直接連接到以太網MAC層下數據鏈路層 (L2) 的現有OSI參考模型層,無需使用低效且昂貴的協議網關。10BASE-T1S多點傳送SPE也是10BASE-T1L長距離(1千米)點對點傳輸的最佳補充。《邊緣設備全以太網方案:10BASE-T1S》白皮書將系統介紹探討10BASE-T1S如何在工業和汽車中運作,本文為第一部分,將介紹工業4.0概述、汽車區域控制與全以太網化、相關標準等。
工業4.0:誘人的方案
工業4.0可以用圖1所示的自上而下的層級金字塔來說明,人工智能(AI)、機器學習(ML)、計劃、執行、自動化、跟蹤、庫存控制、監督控制和編組占據了工廠的前三層,底部的藍色層是工廠車間,其中邊緣節點如機器人、執行器、運動部件、傳感器和閥門在生產線上執行制造工作。
頂部三層通常通過點對點(P2P)局域網(LAN)進行通信。以千兆位級速度運行,而工廠車間通過多種多點網絡現場總線協議進行通信,如HART、RS-485、Mod-bus、DeviceNet、Profi-bus和CAN等,通過屏蔽或非屏蔽的雙絞線以千比特或兆比特的速度通信。這需要在高速局域網和低速工廠網絡之間使用昂貴的網關,同時導致通信碎片化,更不用說給軟件維護增加額外的復雜性了。
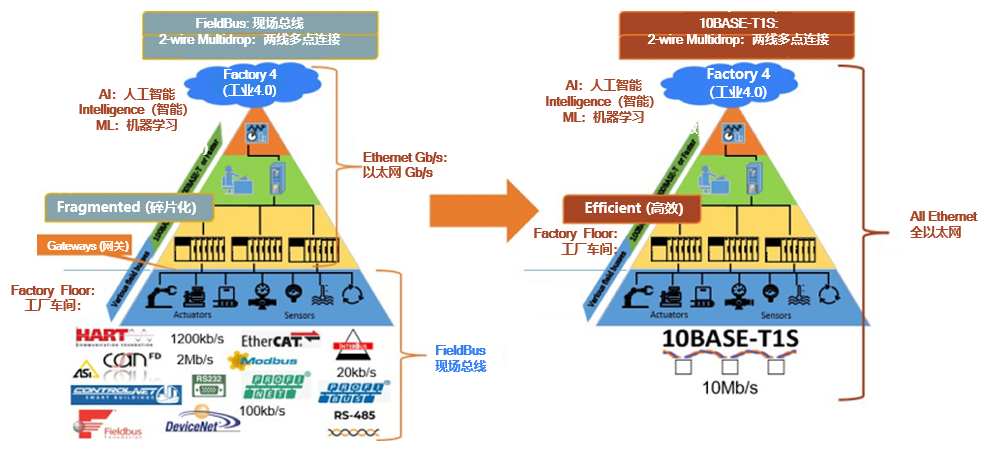
圖1. 工業4.0全以太網方案
汽車區域控制與全以太網化
現代內燃機(ICE)和純電動汽車(BEV)包含多達150個電子控制單元(ECU),分布在整個車輛中,控制如轉向、制動、底盤和動力系統等關鍵功能,以及信息娛樂和舒適性等不太重要的功能。
自20世紀90年代以來,全球汽車行業選擇了CAN、CAN FD、Lin和用于IVN的FlexRay “multi?drop”協議。Multi-Drop表示ECU網絡布線以菊花鏈形式相互連接,點對點拓撲減少了電纜總長度和重量(圖2)。CAN、CAN FD和FlexRay使用非屏蔽單對銅雙絞線。而LIN使用無屏蔽的單根銅線,進一步減輕了電纜重量,直接緩解了“里程焦慮”。這是BEV客戶所關注的重點。
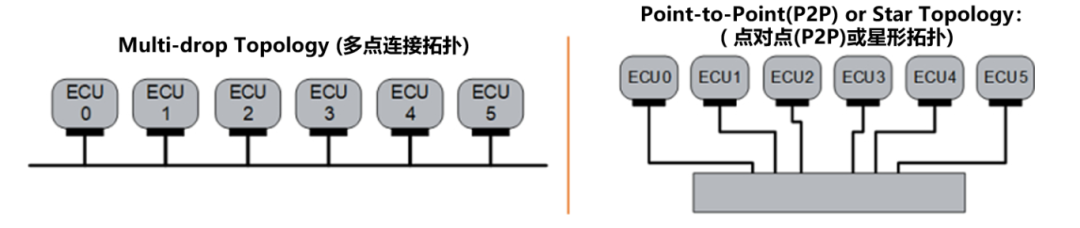
圖2. 多點與P2P(星型)網絡拓撲
LIN支持最大20 kb/s的數據傳輸速率,CAN支持最大約1 MB/s的數據傳輸速率,CAN FD支持最大約5 MB/s的數據傳輸速率,FlexRay支持最大10 MB/s的數據傳輸速率。
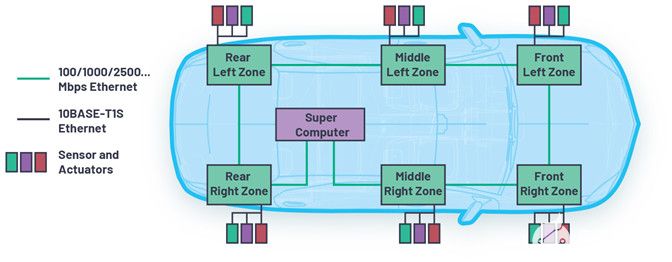
先進駕駛輔助系統(ADAS)負責一些復雜的服務,如車道偏離警告、防撞、自適應巡航控制、盲點檢測和泊車輔助。這些復雜的服務處理計算機,在多個中央融合模塊內聚合,中央融合模塊由高帶寬汽車以太網P2P SPE骨干網連接,以千兆位級速率傳輸,以增強駕駛安全(圖3)。
為了更好地執行這些復雜的ADAS服務,將IVN遷移到區域化電氣/電子面向服務架構,其中ECU和融合模塊被劃分為前-右區域、前-左區域、后-右區域、后-左區域和中央區域(圖3)。
與圖1左側工廠的底部藍色層一樣,汽車IVN中的所有邊緣ECU都使用CAN、CAN-FD、LIN或FlexRay,需要汽車以太網主干網關連接。與工業4.0一樣,全以太網化是實現這些由ADAS驅動的復雜服務的合理方案。雖然與簡單功能相關的ECU可能會繼續使用傳統的LIN、CAN和FlexRay協議,但與復雜的服務相關的大多數ECU將采用10BASE-T1S,如果不是為了提高效率、降低成本和減輕重量(無網關),也是為了以太網“免費”提供的(現有的)增強安全功能。網絡安全對汽車市場至關重要,本白皮書稍后將在安全和MACsec的框架內進行討論。
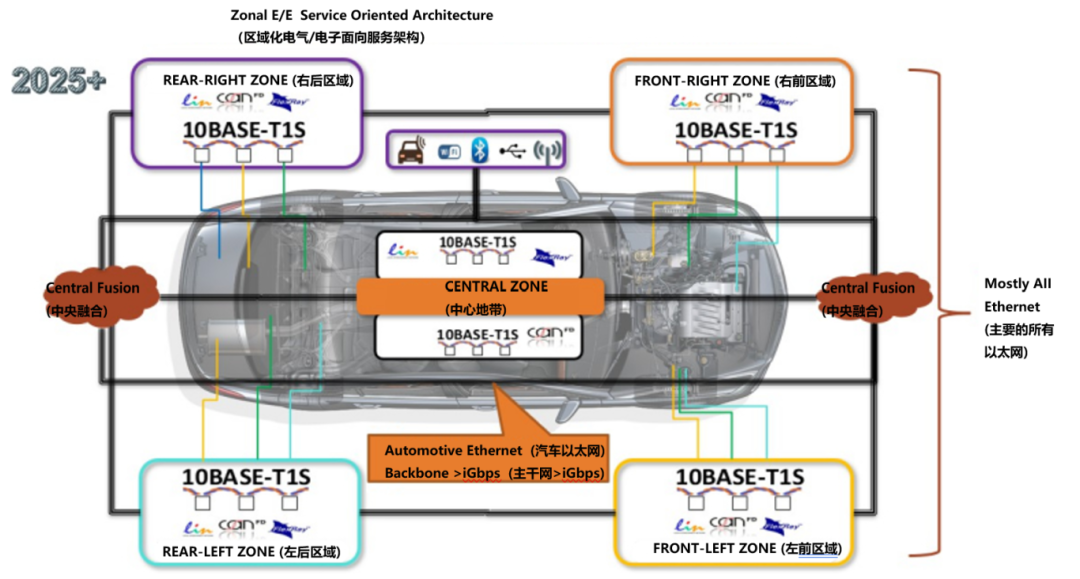
圖3. 區域電氣/電子面向服務的體系結構
IEEE802.3cg規范和10BASE?T1S
2019年,IEEE批準了針對工業、汽車和智能建筑10Mb/s網絡的802.3cg規范。定義了兩個新的物理層:
1. 10BASE-T1L(第146條)
2. 10BASE-T1S(第147條)
10BASE-T1L(或長距離)是一種物理層規范,適用于10MB/以太網局域網,通過單對平衡導線,在點對點(P2P)拓撲結構中以全雙工方式傳輸,傳輸距離至少為1000米。
10BASE-T1S(或稱Short Reach)是一種物理層規范,適用于通過單平衡導線對(通常為26 AWG電纜)的10 MB/s以太網局域網,至少為:
a)點對點(P2P)拓撲,最少15米的全雙工,或
b) 最短25米,半雙工,跨多分支拓撲,支持最少8個節點。節點可與混合數據段連接在一條總線上,或連接在最大長度不超過10 cm的短截線末端(圖4)(注1)。
1. 盡管這些數字對于理解大致范圍是有用的,但應注意,它們在802.3cg中僅僅是指導性的。根據電纜、連接器、PHY和外部元件的選擇,可能會超出這些限制。文本的規范部分定義了IL/RL以及MDI阻抗的范圍。
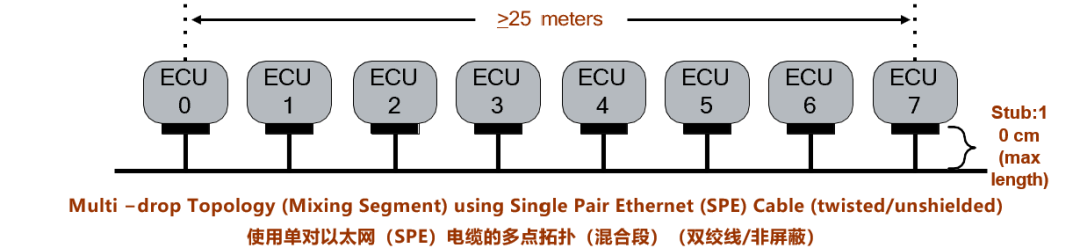
圖4.10BASE?T1S多點混合拓撲
全雙工表示節點可以同時發送和接收,半雙工表示節點可以發送或接收,但不能同時進行。
描述10BASE-T1S的簡便方法是將其與下圖4右側所示的傳統以太網進行比較。其中每個節點通過點對點(P2P)連接到智能交換機,最長100米。每個節點包含一個PHY和一個MAC。每個MAC都包含一個全球唯一的48位地址。以太網幀的范圍為64到1518字節,包括源MAC地址和目的MAC地址。智能交換機會記住每個端口的MAC地址,在不發生沖突下,將以太網幀路由到局域網中的任何節點。大大提高了局域網的整體吞吐量。
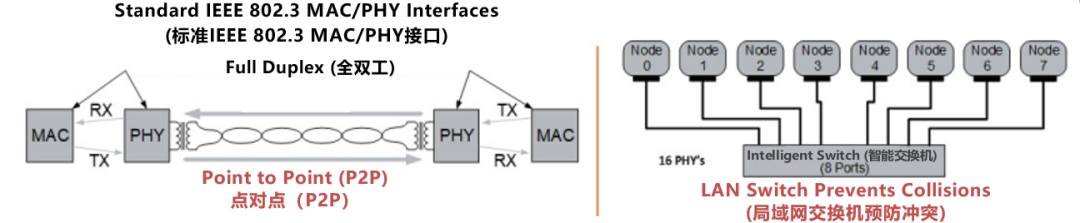
圖5. 標準以太網下避免沖突
10BASE-T1S 局域網(圖4)具有與傳統局域網類似的優點,任何節點可以發送和接收以太網幀(不同時)。圖5的右側所示,需要16個PHY才能完成傳統的以太網8節點局域網。而圖4的10BASE-T1S 8節點局域網只需要8個PHY。10BASE-T1S不僅將PHY數量減少了一半,還減少了局域網中使用的電纜長度和重量。當然,傳統的以太網數據速率遠遠超過10Mb/s,可以達到10Gb/s,甚至更高。但對于10Mb/s帶寬就足夠的應用來說(即工業4.0的底層和汽車IVN中的大多數邊緣ECU),10BASE-T1S非常適合。
10BASE?T1S 局域網(圖4)如何在沒有智能交換機的情況下避免數據包沖突?答案是PLCA(物理層沖突避免機制)(參見IEEE 802.3cg第148條)。
物理層沖突避免機制
圖4所示的PLCA是10BASE-T1S在多點拓撲中運行的基礎。每個節點都分配與MAC地址無關的唯一的節點ID。ID#0稱為PLCA協調器。其他節點是“跟隨者”。只有協調器知道節點的總數,節點也包括它自己。
協調器發出觸發PLCA周期的信標,該信標是20位長的唯一物理層信號。在接收到信標時,所有節點重置它們的內部“傳輸時機定時器”,根據IEEE802.3cg規范,該定時器默認為32位。由于1位時間在10 MB/s為100 ns,因此等于3.2μs。基于它們的ID,每個節點以循環方式輪流(或有機會)“提交”以在總線上傳輸,從節點0開始。
如果一個節點在輪到它的時候沒有可傳輸的數據,它就會保持沉默。其他節點的“傳輸時機定時器”在識別到靜默后會立即超時(默認為3.2μs),觸發下一個ID '#'“提交”進行傳輸。如果節點在其輪次期間具有準備傳輸的數據,則該節點發出COMMIT,即擴展幀前導碼的另一個物理層信號,當提交的節點將單個以太網幀或以太網幀的突發幀(注2)傳輸到總線時,所有其他節點等待。
2. 突發模式是可選的PLCA配置。默認情況下,每個節點每個定時器超時允許一個幀。
下圖6說明了PLCA循環的兩個例子。頂部是最小的PLCA周期,其中總線上的所有節點都沒有掛起的數據放到總線上,因此它們在各自的輪次期間是靜默的。相反,圖6的底部PLCA周期給出了長的PLCA周期,其中每個節點有要放到總線上的待處理數據。因此,每個節點都會發出COMMIT信號,然后繼續將以太網幀發送到總線上。
PLCA周期具有彈性,這種彈性100%基于進入總線的待定數據。當輪到任意節點時,如果該節點沒有總線的掛起數據,最不希望的就是所有其他節點等待很長時間。例如,發生在諸如FlexRay的TDMA(時分多址)系統中。

圖6. PLCA物理層沖突避免
IEEE802.3cg規范要求32位“傳輸時機定時器”轉換為3.2μs靜默。如果10BASE-T1S多點類型上的所有節點一致,則可以使用更短或更長的“傳輸時機定時器”位長度。
表1總結了常見的以太網標準,其中SPE(單對以太網)在汽車中普遍使用,減少了BEV(純電動汽車)的“里程焦慮”(較低的重量)。工業4.0使用2/4對MPE(多對以太網),可以在千兆級速率下具有更遠的傳輸距離。
表1. 多對以太網(MPE)和單對以太網(SPE)

3. 原則上,10BASE?T1L可與非屏蔽電纜一起使用,但此選項僅限于低EMC環境。
功耗
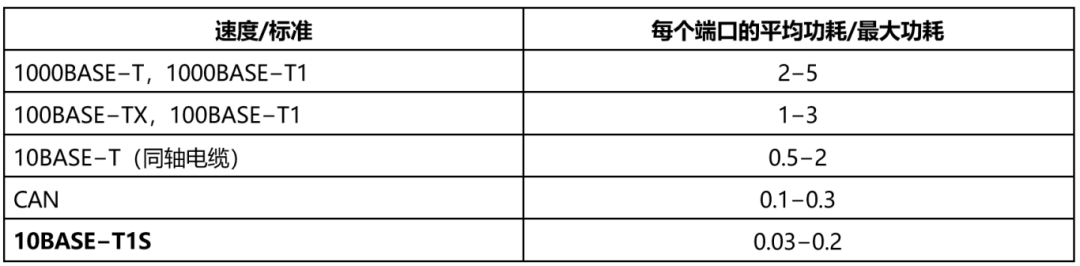
將10BASE-T1S與其他技術進行比較時,需要考慮的另一個重要因素是功耗。隨著電動汽車、物聯網和綠色經濟的出現,在為可能擁有幾十到數百個端口的系統選擇物理層時,這一特性變得極其重要。
點對點以太網PHY是時鐘環路系統,需要“主”和“從”設備之間的連續空閑信號,使CDR、均衡器、回聲消除器和其他自適應濾波器能夠工作。相反,10BASE-T1S PHY在每個接收到的數據包前導碼處執行其濾波器的快速訓練,并在不發送時關閉發射機。由于發射機通常是PHY中功率最大,因此與點對點PHY相比,這會顯著降低功耗。考慮到10BASE-T1S不需要交換機,并且一次只有一個PHY在共享介質上傳輸,這種節省在系統級別上顯得更為顯著。
與通常需要5 V電源的CAN相比,10BASE-T1S僅需要1 VPP 發送電壓。因此,它可以在3.3 V電源下工作,并且有望在將來降至1.2 V,從而在功耗方面再次獲得巨大優勢。
截至目前,下表總結了各種PHY的典型功耗,沒有考慮點對點以太網交換機所需的額外功率以及CAN網關連接到以太網骨干網所需的附加功率。
表2
全以太網:CAN殺手/現場總線殺手?
10BASE-T1S的優點在于,它直接連接到數據鏈路層(L2)的現有OSI參考模型層上,位于以太網MAC層下方,如下圖7所示,該圖來自IEEE802.3cg規范圖148-1。
MAC子層以上的層保持不變
開發人員仍然可以在較高層中使用現有軟件或IP
從半導體的角度來看,只有PHY是不同的
圖7強調了10BASE-T1S相對于其他二線制網絡協議(如CAN、CAN-FD、現場總線、Mod-Bus、RS-485和工廠及汽車IVN上的其他非以太網)所具有的全以太網優勢。您將很難找到一個比以太網更普遍、更值得信賴的連接解決方案,該解決方案在近50年的標準化、互操作性和全球市場應用中得到了驗證。

圖7. 摘自IEEE802.3cg規范圖148?1
數據線供電(PoDL)
IEEE802.3cg規范完全支持10BASE-T1L(第104條)、T1S P2P的PoDL,但不支持10BASE-T1S多點連接。P2P拓撲對于實現PoDL是相對直接的,因為只有一個節點傳送功率并且只有一個節點消耗功率,非常類似于P2P的 PoE(以太網供電)。對于PoDL,10BASE-T1S多點連接有點復雜,因為最少有8個節點,其中一個提供電源,最少有7個節點消耗功率。
然而,在某些情況下,特定客戶將所謂的“工程PoDL ”成功安裝到10BASE-T1S多點應用中。本白皮書發布時,IEEE802.3da規范仍在制定中,該規范將為10BASE-T1S多點應用指定非工程PoDL。下面討論了10BASE-T1S多點連接的“工程PoDL”示例。
-
以太網
+關注
關注
40文章
5374瀏覽量
171093 -
Mac
+關注
關注
0文章
1099瀏覽量
51368 -
工業4.0
+關注
關注
48文章
2000瀏覽量
118527
原文標題:10BASE-T1S如何推動工業與汽車革新?5000字長文詳解
文章出處:【微信號:onsemi-china,微信公眾號:安森美】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
揭秘為什么10BASE-T1S是汽車通訊中缺失的以太網鏈接
安森美推出全新10BASE-T1S以太網控制器
為何10BASE-T1S是汽車通信中缺失的以太網鏈路
新品速遞 | EMC對策產品:TDK公司推出業內首款用于汽車以太網10BASE-T1S的共模濾波器
滿足10BASE-T1S規范的共模扼流圈及貼片壓敏電阻
Microchip推出單對以太網(SPE)器件10BASE-T1S和100BASE-T1,推進IIoT邊緣和高速應用
Microchip推出單對以太網(SPE)器件10BASE-T1S和100BASE-T1
Microchip推出首批車規級10BASE-T1S以太網器件

10BASE-T1S車載以太網簡介及網絡架構

車載以太網10BASE-T1S通信解決方案

10BASE-T1S標準來襲:虹科新品以太網接口卡,汽車網絡的新變革者?

NCN26010 10Base-T1S器件配置指南(1)

NCN26010 10Base-T1S器件配置指南(2)






 工商網監
工商網監
評論