 傳感器融合如何賦能自主移動機器人
傳感器融合如何賦能自主移動機器人
自主移動機器人(AMR)可幫助制造商提高生產效率、增強安全性并節省大量成本,因而在各行各業得到廣泛應用。2022年全球AMR市場規模為86.5億美元,預計2022年至2028年間的復合年增長率(CAGR)將達到18.3%。
進入工業5.0時代,人類將與人工智能(AI)機器人協同工作,機器人輔助而非取代人類。愿景固然美好,但要實現這一目標,AMR必須克服重重挑戰,集成各種傳感器以及新興的傳感器融合技術將為此提供助益。
AMR采用過程中所面臨的挑戰
AMR普及的一大難題是其在多種不同應用和環境中的適應性。AMR已廣泛應用于倉庫、農業技術、商業園林綠化、醫療保健、智能零售、安防和監控、配送、庫存管理、揀選和分類等多個領域。在這些不同的環境中,AMR需要安全地與人類共處。
此外,復雜的情境也極大地增加了AMR的工作難度。有些情況人類可以輕松應對,但對AMR而言卻并非易事。例如,假設送貨機器人在配送最后一個包裹的途中看到路中間有個球,它可能會成功識別這一障礙物并避免碰撞。但其智能化程度是否足以預判會有小孩跑出來撿球呢?類似這樣的復雜情境還有很多:AMR能否利用安裝在柱子上的90度反光鏡觀察彎道的交通狀況并做出預測?AMR是否知道自己不能在新澆筑的混凝土上行走?
人類很容易作出判斷,但機器人卻難以應對。然而,若配備了合適的傳感器,AMR在強日光下檢測物體的能力可以超越人類。不過,澆筑的混凝土和噴灑的液體仍然比較難以識別。邊緣、懸崖、坡道和樓梯對于AMR來說都是挑戰。還有一些特殊情況,比如有人故意搞破壞,將AMR推翻,這也是早期開發逃逸機動系統的緣由。
要想解決這些挑戰,需要在AI技術中采用先進的大型語言模型(LLM)和各類高性能傳感器。
用于AMR的高性能傳感器
AMR需要使用不同類型的傳感器進行同步定位與地圖構建(SLAM),并提供距離和深度測量。傳感器的重要指標包括物體檢測、物體識別、顏色識別、分辨率、功耗、尺寸、成本、范圍、動態范圍、速度以及在各種光照和天氣條件下的適應性。
可用于AMR的傳感器模式包括:
CMOS 成像
直接飛行時間(dToF)和間接飛行時間(iTOF)深度感知
超聲波
雷達
電感定位
低功耗藍牙(Bluetooth LE) 技術
慣性
上述模式各有其優缺點。例如,雷達能在弱光或惡劣天氣條件下有效測量范圍和速度,但顏色檢測能力較差,初始成本高,且體積較大,而這在AMR設計中是一個重要考慮因素。激光雷達采用大批量CMOS硅鑄造工藝,因此初始成本相對較低,且能夠在夜間/直射陽光下進行檢測,但在物體分類方面表現欠佳。同樣,iToF深度傳感器具有出色的分辨率和低功耗處理能力。
顯然,要為AMR提供全面的信息以應對上述挑戰,僅靠單一的傳感器模式無法滿足需求。根據應用和環境的不同,AMR需要使用多種傳感器模式。這些傳感器不會單獨運行,而是通過“傳感器融合”共同發揮作用。
傳感器融合如何賦能自主移動機器人
傳感器融合是指將兩個或多個數據源(來自傳感器和/或算法或模型)組合,以更好地了解系統及其周圍環境。AMR中的傳感器融合不僅可以提升可靠性、冗余度并最終確保安全性,還可以提高評估的一致性、準確性和可信度,是一項必不可少的技術。
如下圖1所示,傳感器融合結合了數據收集和數據解釋兩個功能。
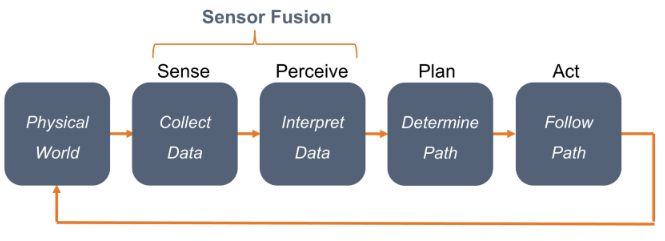
圖1:傳感器融合過程
在傳感器融合中,“解釋數據”的步驟需要實現算法或模型。有時傳感器融合的結果直接為人類提供有用信息(如倒車輔助),有時則供機器作進一步處理(如安防系統中的人臉識別)。
傳感器融合具有多種優勢,例如降低信號噪聲。同質傳感器融合可以降低非相關噪聲,而異構傳感器融合可以降低相關噪聲。
傳感器融合本質上可通過冗余來提高可靠性。傳感器的數量至少有兩個,這意味著即使其中一個傳感器的數據丟失,雖然數據質量降低,但系統仍可利用其他傳感器提供的數據繼續工作。傳感器融合還可用于預估無法直接測量的狀態,如遮擋(當攝像頭無法觀察到物體或物體的一部分時)和反射(當物體或表面將光線從一個攝像頭反射到另一個攝像頭時)。
鑒于以上優勢,且隨著采用率日益增長,傳感器融合領域已呈現以下趨勢:
采用AI驅動的算法
增強物體檢測和分類能力
傳感器融合用于實現協同感知
多種傳感器模式
惡劣條件下的環境感知
傳感器融合用于實現360度環視
實時傳感器校準
傳感器融合的核心在于傳感器本身,如果獲取的數據不理想,再好的算法也無法生成高質量的結果。令人欣喜的是,安森美(onsemi)提供了一系列出色的傳感器和工具,支持將傳感器融合技術用于AMR中。
總結
自主移動機器人應用場景多樣,采用率加快提高。為順應趨勢,行業已形成了相關的最佳實踐。首先,對環境實施控制,以減少AMR可能遇到的潛在碰撞情形。例如,可以在制造設施或倉庫中為AMR/自動引導車輛(AGV)設定專門的路線。其次,在開發過程中使用數字孿生仿真實際使用場景(包括邊界工況)。最后,將傳感器融合與智能傳感器、算法和模型相結合。
在智能感知技術領域,安森美一直走在前列。安森美提供各類卷簾快門和全局快門圖像傳感器,具有優異的動態范圍性能,并配備運動喚醒等創新功能。除圖像傳感器外,安森美還提供用于距離檢測的SiPM(激光雷達)。該產品組合包括超聲波傳感器、電感傳感器和采用低功耗藍牙技術的微控制器,后者支持可用于定位的AoA(到達角)和AoD(出發角)。
AMR中的傳感器融合必將對工業和運輸應用邁向工業5.0的進程產生重大影響,安森美致力于提供完備的傳感器和子系統,確保一切順利過渡。進一步了解我們的AMR方案和系統方案指南。
-
傳感器
+關注
關注
2548文章
50664瀏覽量
751939 -
安森美
+關注
關注
32文章
1648瀏覽量
91936 -
導航
+關注
關注
7文章
522瀏覽量
42375 -
自主移動機器人
+關注
關注
2文章
41瀏覽量
11573
原文標題:傳感器融合技術如何助力自主移動機器人導航再升級?
文章出處:【微信號:onsemi-china,微信公眾號:安森美】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論