") 智能移動(dòng)機(jī)器人系統(tǒng)方案指南
智能移動(dòng)機(jī)器人系統(tǒng)方案指南
自主移動(dòng)機(jī)器人 (AMR) 和自動(dòng)導(dǎo)引車 (AGV) 是具有移動(dòng)、感知和連接能力的無人機(jī)器人,用于運(yùn)輸和移動(dòng)各種重量和尺寸的負(fù)載,以及執(zhí)行其他功能。此類機(jī)器人通常由電池供電,典型電池電壓在 12 V 至 48 V 之間。根據(jù)所采用的技術(shù)和預(yù)期用途,此類機(jī)器人系統(tǒng)可以與人類進(jìn)行不同程度的交互,比如在人員周圍安全運(yùn)作,與人員進(jìn)行高效的合作和協(xié)同工作。為幫助工程師更好地解決設(shè)計(jì)難題,智能移動(dòng)機(jī)器人系統(tǒng)方案指南重磅上線!本文為第二部分,將介紹方案概述、系統(tǒng)描述等。
方案概述
頂層拓?fù)?/strong>
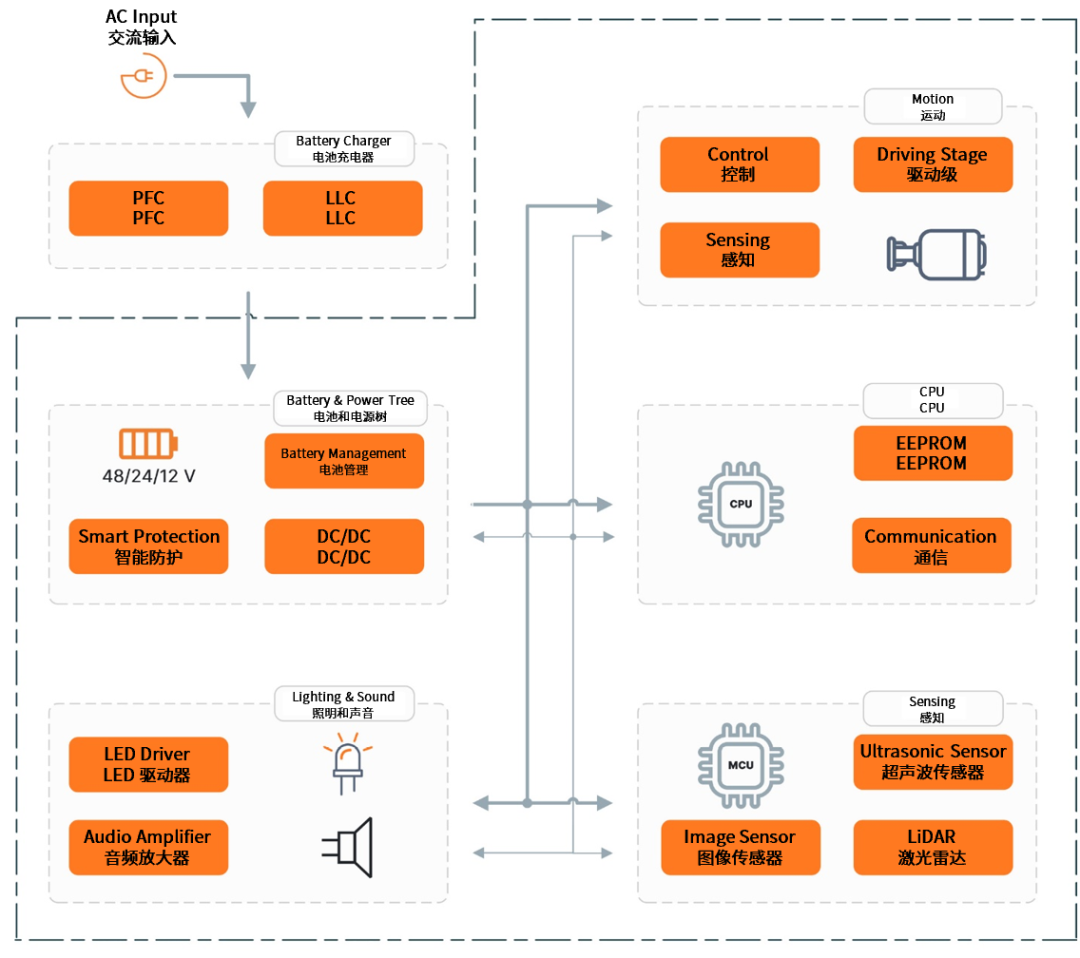
下面的框圖代表了安森美 (onsemi)創(chuàng)建的智能移動(dòng)機(jī)器人方案。
大多數(shù)功能塊器件可從安森美購得,如下面的器件表所示。
系統(tǒng)描述
電池充電器
電池充電器不屬于機(jī)器人的組成部分(非機(jī)內(nèi)部件),電池充電器的典型功能包括將單相 120 - 230 Vac 轉(zhuǎn)換為 12-48 V 電池電壓。更高功率的機(jī)器人可以使用三相交流電來減少充電和閑置時(shí)間。充電器可以是有線的,也可以是無線的;機(jī)器人可以在充電站充電,也可以使用機(jī)會(huì)充電。
機(jī)會(huì)充電(也稱為過程中充電)是指對(duì)電池進(jìn)行短時(shí)間充電,而不是一次性將電池完全充滿。使用機(jī)會(huì)充電時(shí),電池?zé)o需完全放電,機(jī)器人也無需因?yàn)橐L時(shí)間充電而暫停工作。此外,機(jī)會(huì)充電讓機(jī)器人可以使用更小的電池,從而進(jìn)一步降低系統(tǒng)的成本和重量。機(jī)會(huì)充電可以在工作站、裝卸站等地方進(jìn)行。
在某些情況下,系統(tǒng)可能會(huì)使用換電方法來盡量減少停機(jī)時(shí)間。這對(duì)于戶外流程是有益的,但需要額外的電池,因而會(huì)增加前期投資。
AC/DC 充電器通常由兩個(gè)子系統(tǒng)組成:PFC 級(jí)和 LLC 轉(zhuǎn)換器。
功率因數(shù)校正 (PFC) 通過改善功率因數(shù)來提高轉(zhuǎn)換效率。為此,需要對(duì)輸入電流進(jìn)行整形,使其跟隨輸入電壓,從而減少諧波。PFC 級(jí)提供穩(wěn)定的直流輸出電壓,優(yōu)化了后續(xù)隔離式 DC/DC 轉(zhuǎn)換器的設(shè)計(jì),可以使用范圍較窄的直流輸入。
LLC 是一種諧振 DC/DC 轉(zhuǎn)換器,可在快速切換的同時(shí)降低晶體管損耗。兩個(gè)電感器和一個(gè)電容在開關(guān)頻率下產(chǎn)生諧振,使得晶體管能夠在過零點(diǎn)處切換,從而減少損耗。
方案概述
功率因數(shù)校正
PFC 級(jí)是一個(gè) AC/DC 轉(zhuǎn)換器。實(shí)現(xiàn)方式通常是在整流橋和輸入電容之間插入升壓轉(zhuǎn)換器級(jí)。目標(biāo)是對(duì)輸入電流進(jìn)行整形,使其匹配輸入電壓的形狀。
顯然,橋式二極管會(huì)產(chǎn)生很大的損耗,因?yàn)槠鋼p耗呈線性函數(shù)關(guān)系,會(huì)隨著功率輸出的增加而增加。圖騰柱 PFC 用有源開關(guān)代替二極管,從而降低了損耗。
圖騰柱 PFC
減少電源開關(guān)數(shù)量
快速橋臂傾向于采用寬禁帶半導(dǎo)體,目的是提高效率
控制方式比升壓 PFC 復(fù)雜
最佳效率 - 傳導(dǎo)路徑中只有兩個(gè)器件
大功率應(yīng)用 (>300W) 的首選
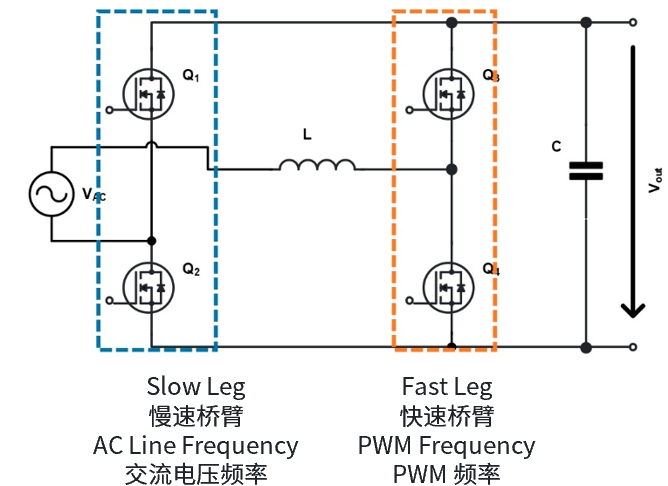
圖 1:圖騰柱 PFC 原理圖
功率因數(shù)控制器 NCP1680
無橋圖騰柱 Crm(臨界導(dǎo)通模式)PFC 控制器
恒定導(dǎo)通時(shí)間 Crm 和谷底同步頻率折返,可在整個(gè)負(fù)載范圍內(nèi)實(shí)現(xiàn)效率優(yōu)化
交流電壓監(jiān)測(cè)和交流相位檢測(cè)
新穎的谷底檢測(cè)方案和零電流檢測(cè)
逐周期限流,無霍爾傳感器 - 減少外部元件
最適合功率水平 <350W 的應(yīng)用
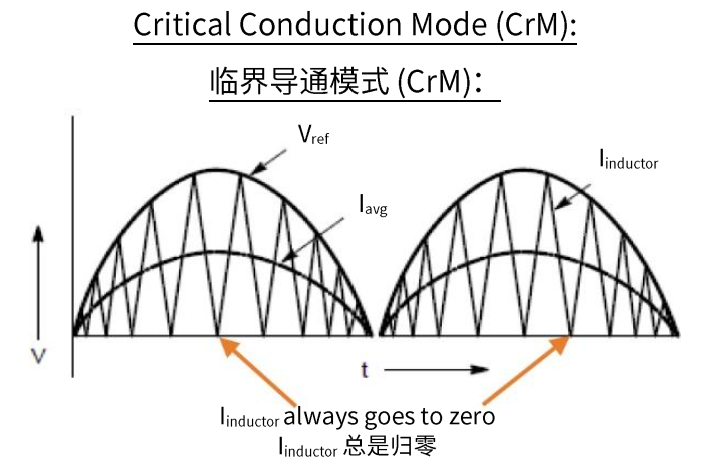
圖 2:臨界導(dǎo)通模式
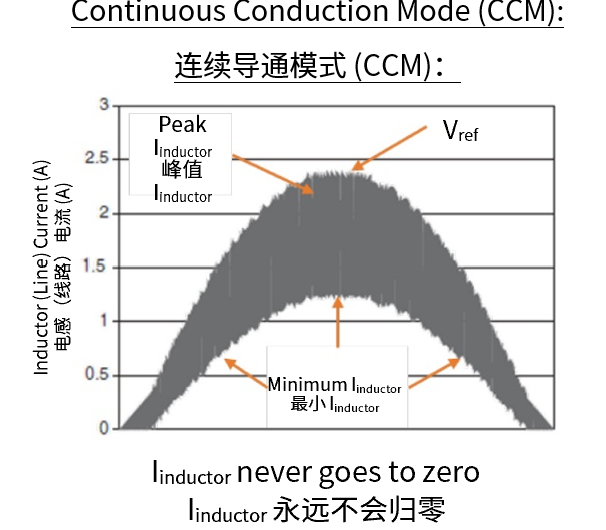
圖 3:連續(xù)導(dǎo)通模式
功率因數(shù)控制器 NCP1681
無橋圖騰柱多模式 PFC 控制器
固定頻率 CCM(恒定導(dǎo)通模式),具有恒定導(dǎo)通時(shí)間 CrM 和谷底開關(guān)頻率折返功能
專有電流檢測(cè)方案
專有谷底檢測(cè)方案
非常適合高功率多模式應(yīng)用,最高 1kW,CCM >2.5kW
LLC 轉(zhuǎn)換器
通過諧振轉(zhuǎn)換器拓寬軟開關(guān)的范圍,以提高效率
由于開關(guān)頻率更高且開關(guān)損耗更低,因此十分高效
復(fù)雜的控制算法和諧振儲(chǔ)能電路設(shè)計(jì)
良好的 EMI 和低輸出紋波
所有電感器均可集成到單個(gè)磁結(jié)構(gòu)中,節(jié)省面積和成本
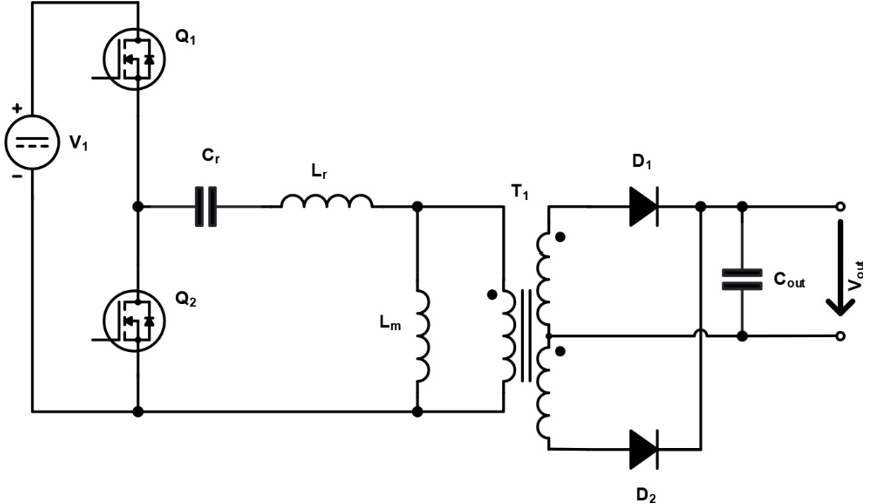
圖 4:LLC 轉(zhuǎn)換器原理圖
離線控制器 NCP4390
次級(jí)側(cè) LLC 諧振轉(zhuǎn)換器,帶同步整流器控制,采用 SOIC-16 封裝
雙邊沿跟蹤的同步整流控制
寬工作頻率范圍 (39kHz ~ 690kHz)
通過補(bǔ)償削減(頻移)實(shí)現(xiàn)零電壓開關(guān) (ZVS) 預(yù)防 (NZP)
初級(jí)側(cè)開關(guān)和 SR 開關(guān)的死區(qū)時(shí)間可編程
系統(tǒng)描述
電池系統(tǒng)和電源樹
電池、電池管理和電壓轉(zhuǎn)換系統(tǒng)是機(jī)器人的機(jī)載部件。
電池要求根據(jù)具體情況有所不同。通常,移動(dòng)機(jī)器人使用鋰離子或磷酸鐵鋰電池。鋰離子電池更為常見,能量密度更高。磷酸鐵鋰電池則更穩(wěn)定,不易過熱,標(biāo)稱電壓較低。
電池容量和電壓取決于所需的有效負(fù)載、行駛距離和充電類型。最常用的是 12-48V 電池系統(tǒng),它們可以并聯(lián)以提升性能。
典型的 24V 電池容量約為 50Ah,重量約為 10kg。
電源樹為系統(tǒng)中的所有邏輯電平和低壓供電軌供電。通常,它不需要隔離(電池電壓低于 50 V),實(shí)現(xiàn)方式為使用多個(gè)并聯(lián)降壓轉(zhuǎn)換器并與低壓差穩(wěn)壓器 (LDO) 結(jié)合。
電源樹利用 SMPS(開關(guān)電源)和 LDO(低壓差穩(wěn)壓器)的組合,為子系統(tǒng)提供所有需要的電壓水平。圖 5 中的框圖顯示了這種電源樹的示例。
根據(jù)所需電流,可以使用 FAN6500x 系列降壓轉(zhuǎn)換器。
此外,各種子組件(如柵極驅(qū)動(dòng)器或圖像傳感器)可能需要精確的(甚至多個(gè))電壓水平,而電流消耗相對(duì)較低。對(duì)于此類情況,安森美的 LDO 是理想方案。
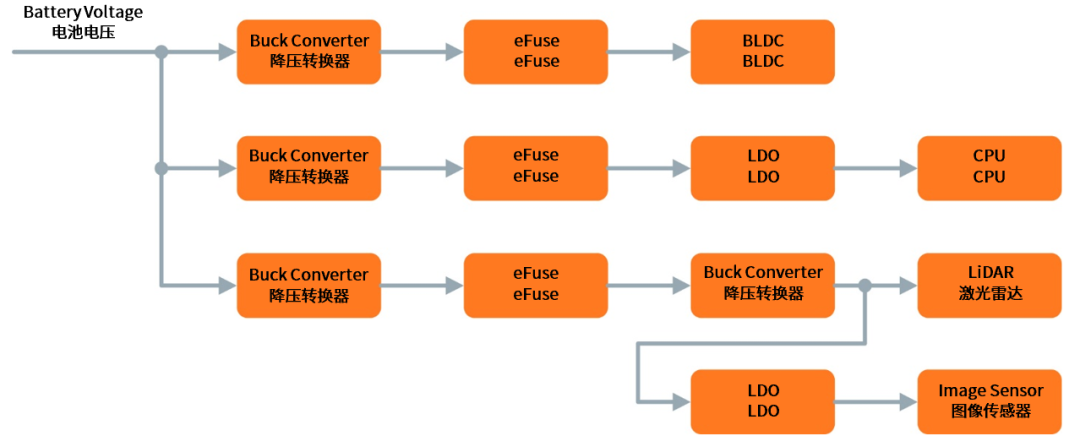
圖 5:電源樹框圖示例
轉(zhuǎn)換器FAN65008B
集成高邊和低邊功率 MOSFET 的同步降壓調(diào)節(jié)器。包含固定頻率電壓模式 PWM 控制器。
提供寬范圍的電壓轉(zhuǎn)換,輸出電流 > 2A 時(shí)效率超過 95%,如圖 6 所示。
關(guān)鍵特性:
寬輸入電壓范圍:4.5V 至 65V
10A 連續(xù)輸出電流
可編程開關(guān)頻率:100kHz 至 1Mhz
熱關(guān)斷、欠壓鎖定、過載和短路保護(hù)
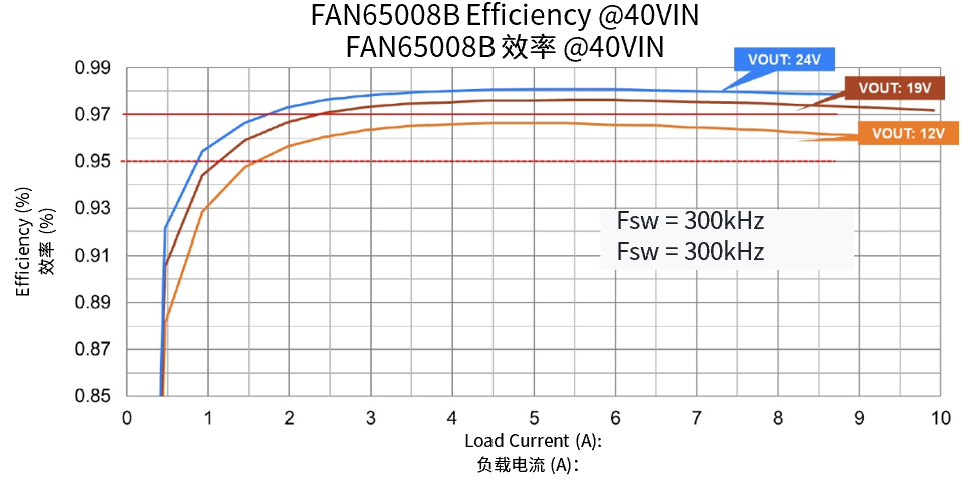
圖 6:FAN65008B 在不同輸出電壓下的負(fù)載效率
安森美提供一套完整的工具,幫助客戶為應(yīng)用選擇最合適的 LDO。
Web Designer+
使用在線 Web Designer+ 電源設(shè)計(jì)工具來設(shè)計(jì)電源。根據(jù)應(yīng)用需求,選擇最適合的安森美定制產(chǎn)品。幾秒鐘內(nèi),我們就能為您驗(yàn)證數(shù)百種可能的方案,助您選出最合適的方案。這款工具易于使用,可幫助您節(jié)省時(shí)間和精力。
連接(取代 CAN)
AMR 中的 CPU 和所有構(gòu)建塊需要相互通信。通信手段有許多種。傳統(tǒng)上,使用的是 CAN、LIN、RS-485、RS232 和許多其他方式。所有這些都可以用 10Base-T1S 取代。
它是 IEEE 在 802.3cg 第 147 條規(guī)范中指定的以太網(wǎng)協(xié)議。借助 10BASE-T1S,僅使用一根雙絞線便可將多個(gè) PHY 連接到公共總線。這減少了所需的交換機(jī)端口數(shù)量,并且無需網(wǎng)關(guān)。由于 10BASE-T1S 只需要一根非屏蔽雙絞線,因此布線成本也大大降低。
此外,10BASE-T1S 的通信速度可達(dá) 10Mbps,高于迄今為止的許多方案(例如,LIN 最高為 20Kbps,CAN 最高為約 1Mbps)。
任何節(jié)點(diǎn)都可以向/從任何其他節(jié)點(diǎn)發(fā)送/接收以太網(wǎng)幀,類似于傳統(tǒng)的以太網(wǎng) LAN。
在多分支拓?fù)洌ㄈ鐖D 7 所示)中運(yùn)行時(shí),物理層沖突避免 (PLCA) 特性可以避免數(shù)據(jù)包沖突。節(jié)點(diǎn)會(huì)根據(jù)各自的 ID 輪流(一次一個(gè))在總線上進(jìn)行傳輸。PLCA 周期不是固定的,取決于待處理的數(shù)據(jù)。
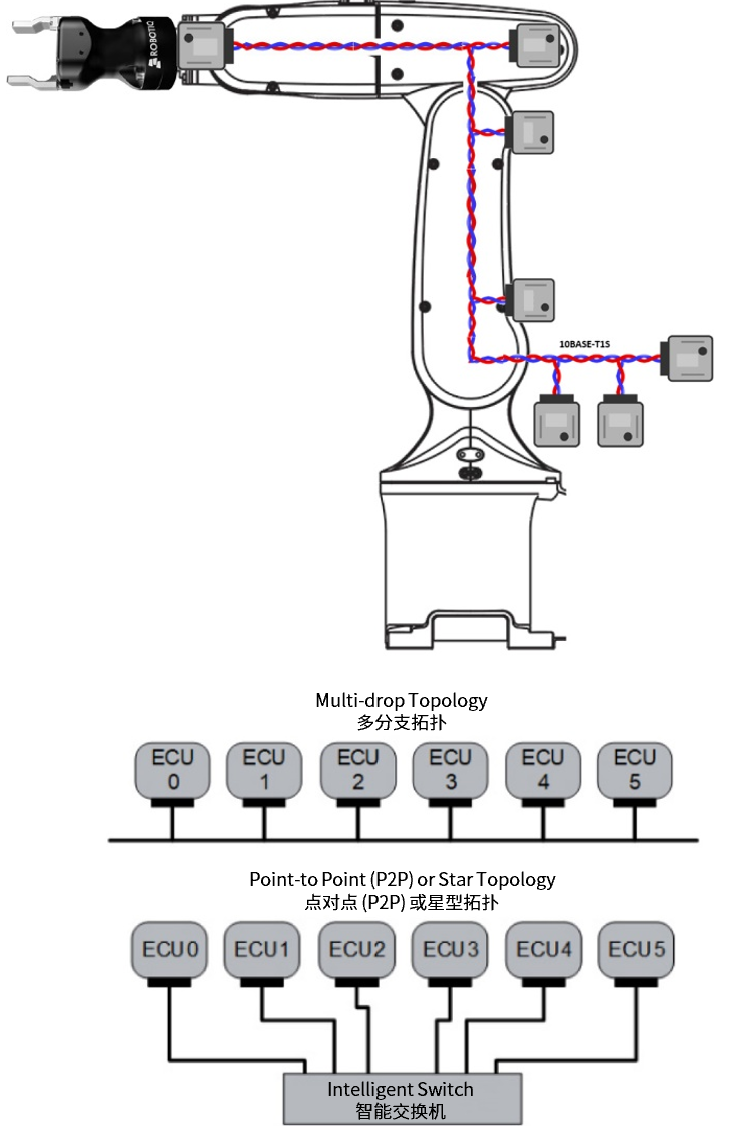
圖 7:多分支與點(diǎn)對(duì)點(diǎn)網(wǎng)絡(luò)拓?fù)?/p>
以太網(wǎng)控制器 NCN26010
10Mb/s 工業(yè)以太網(wǎng) MAC+PHY IC 控制器
符合 10BASE?T1S – IEEE 802.3cg 標(biāo)準(zhǔn)
集成 MAC 和 10BASE-T1S PHY
PLCA 突發(fā)模式 – 如果某個(gè)節(jié)點(diǎn)需要發(fā)送比所有其他節(jié)點(diǎn)都多的數(shù)據(jù),則允許該節(jié)點(diǎn)在每次 PLCA 傳輸機(jī)會(huì)中發(fā)送更多幀
支持 8 個(gè)以上節(jié)點(diǎn),UTP 線纜傳輸距離超過 25m
增強(qiáng)抗噪聲能力
全局唯一 MAC 地址
32 引腳 QFN 封裝

圖 8:10BASE-T1S MACPHY 開發(fā)套件演示了基本功能并支持開發(fā)軟件
方案概述
智能防護(hù)
eFuse 和 SmartFET 等智能防護(hù)功能可提高效率和可靠性,并減少機(jī)器人停機(jī)時(shí)間。
eFuse 是一種自保護(hù)、可復(fù)位的電子保險(xiǎn)絲。它通常監(jiān)視輸入/輸出電壓、輸出電流和溫度。eFuse 可提供過電流、過壓和高溫保護(hù)。它可以防止下游器件、連接器和 PCB 走線受損。eFuse 可用于熱插拔情況以及需要限制浪涌電流的情況。
SmartFet 可用于保護(hù)低壓供電軌(如 12V)。它提供短路保護(hù)功能,可應(yīng)對(duì)浪涌電流,并提供熱關(guān)斷和自動(dòng)重啟功能,以防止高溫。此外,它還具有過壓保護(hù)功能。
電流保護(hù) NIS3071
四通道 eFuse
四個(gè)獨(dú)立通道,每個(gè)通道支持最高 2.5A、60V
高度可擴(kuò)展 – 可以組合輸出以將限流值提高至 10A,參見圖 9
每個(gè)通道均有熱保護(hù)功能
數(shù)字使能、公共故障引腳
可調(diào)導(dǎo)通時(shí)間控制
可調(diào)過電流限值
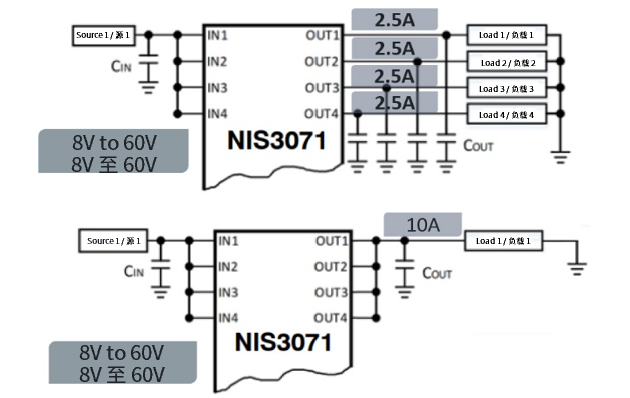
圖 9:NIS3071 可擴(kuò)展性
受保護(hù)的 MOSFET NCV84045
受到全面保護(hù)的單通道高邊驅(qū)動(dòng)器,具有高級(jí)保護(hù)功能
CMOS 兼容控制輸入
最高 32A 輸出電流
超低 RDSON 50mΩ(典型值)
電流檢測(cè)輸出診斷反饋 – 圖 10
用于電感切換的集成箝位
接地?fù)p耗和 VD 保護(hù)損耗
ESD 保護(hù)、短路保護(hù)
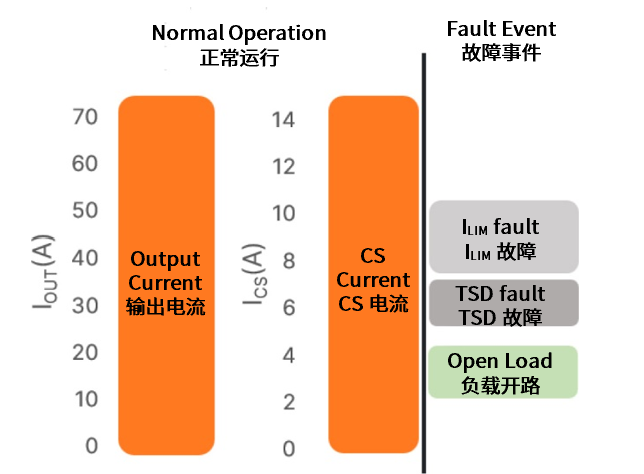
圖 10:差異化 CS 輸出電流 – 根據(jù)故障類型,電流檢測(cè)的輸出電流水平不同
CPU
中央處理器 (CPU) 是整個(gè)系統(tǒng)的“大腦”,負(fù)責(zé)系統(tǒng)內(nèi)部以及與外部環(huán)境的所有通信。根據(jù)系統(tǒng)的復(fù)雜性,CPU 需要具有足夠的算力。
為了構(gòu)建機(jī)器人,可以使用機(jī)器人操作系統(tǒng) (ROS),這是一個(gè)開源的軟件開發(fā)套件 (SDK),提供了構(gòu)建先進(jìn)機(jī)器人系統(tǒng)所需的組件、接口和工具。
同步定位與地圖構(gòu)建 (SLAM)
SLAM是一種用于創(chuàng)建未知環(huán)境地圖的方法。移動(dòng)機(jī)器人利用 SLAM 算法在周圍環(huán)境中進(jìn)行自主導(dǎo)航,適用于 2D 和 3D 運(yùn)動(dòng)。SLAM 利用激光雷達(dá)、立體視覺、飛行時(shí)間傳感器等傳感器及組合實(shí)現(xiàn),沒有它,機(jī)器人無法設(shè)置最佳路徑,效率和電池壽命會(huì)受到影響。

SLAM 需要執(zhí)行的工作包括:
動(dòng)態(tài)環(huán)境建模,使用深度和環(huán)境感知數(shù)據(jù);
地圖構(gòu)建,表示環(huán)境中的障礙物;
障礙物檢測(cè)和跟蹤,使用深度和環(huán)境感知數(shù)據(jù);
航位推算,估計(jì)行駛方向和距離來計(jì)算位置;
最佳路徑規(guī)劃和導(dǎo)航,計(jì)算并執(zhí)行路徑避免障礙物;
定位和定向,根據(jù)環(huán)境中的已知點(diǎn)進(jìn)行自我定位;
航跡推演,使用運(yùn)動(dòng)傳感器數(shù)據(jù)估計(jì)位置變化。
系統(tǒng)描述
運(yùn)動(dòng)和執(zhí)行器控制
機(jī)器人的運(yùn)動(dòng)通常基于輪子,也可能包含機(jī)械臂或負(fù)載提升,這些通常依賴于無刷直流 (BLDC) 電機(jī)。BLDC 電機(jī)的精確控制需要復(fù)雜算法,電機(jī)驅(qū)動(dòng)器必須高效、緊湊且功耗低。這是智能機(jī)器人系統(tǒng)的關(guān)鍵子系統(tǒng),也是主要的功耗源,系統(tǒng)必須高效、緊湊和輕便以延長機(jī)器人運(yùn)行時(shí)間。
BLDC 控制使用脈寬調(diào)制 (PWM) 信號(hào)來確定開關(guān)狀態(tài),這稱為變頻驅(qū)動(dòng) (VFD)。電機(jī)控制器可以是全集成式的,內(nèi)置控制算法,或需要專用微控制器 (MCU) 實(shí)現(xiàn)控制算法。安森美提供多種分立產(chǎn)品用于 VFD 解決方案,如 MOSFET、IGBT、柵極驅(qū)動(dòng)器和二極管。
集成更多部件的模塊,如功率集成模塊 (PIM) 和智能功率模塊 (IPM),可減少組件數(shù)量和節(jié)省空間,這些模塊可以在安森美的產(chǎn)品組合中找到。
BLDC 控制方案的另一個(gè)重要部分是感知,為了準(zhǔn)確換向,必須知道定子位置,這可以通過霍爾傳感器或電感傳感器實(shí)現(xiàn),后者是一種新穎的解決方案,將在后續(xù)文檔中詳細(xì)描述。
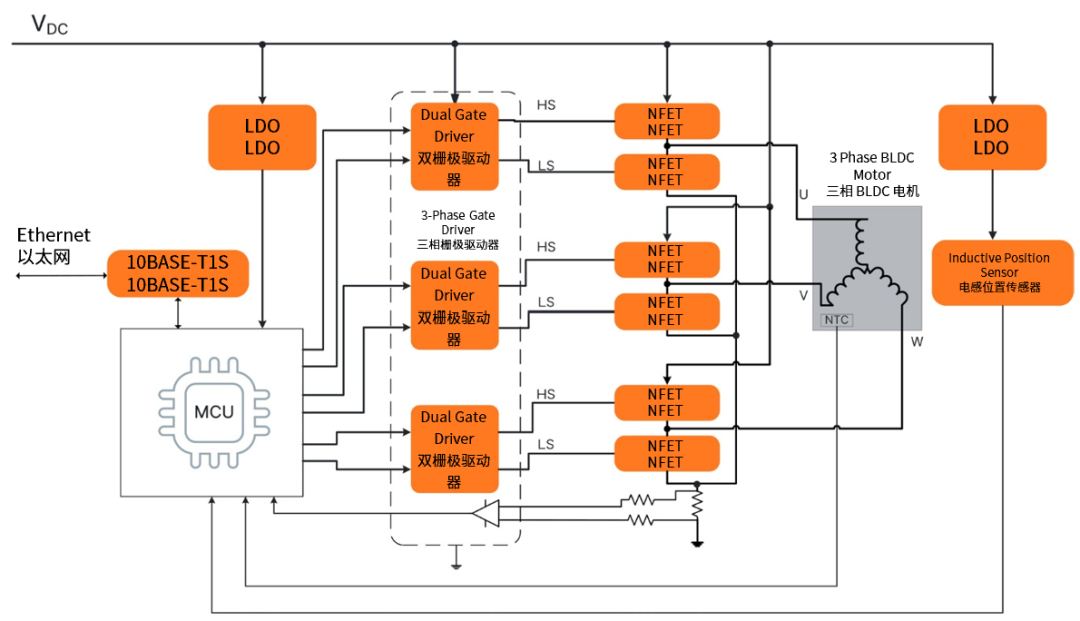
圖 11:BLDC 控制功能塊原理圖示例
方案概述
柵極驅(qū)動(dòng)器和 MOSFET
MOSFET 必須由柵極驅(qū)動(dòng)器來驅(qū)動(dòng),因?yàn)?MCU 或控制器無法直接驅(qū)動(dòng) MOSFET。柵極驅(qū)動(dòng)器可以是單個(gè)半橋,驅(qū)動(dòng)一個(gè)高邊和一個(gè)低邊 MOSFET,也可以包含三個(gè)半橋柵極驅(qū)動(dòng)器,控制所有三個(gè)電機(jī)相。集成多種特性的單片三相柵極驅(qū)動(dòng)器正在興起,并成為發(fā)展趨勢(shì)。安森美提供出色的中壓 (MV) MOSFET,電壓范圍從 40V 到 150V,采用多種先進(jìn)封裝,是機(jī)器人電機(jī)應(yīng)用的理想方案。根據(jù)工作電壓和驅(qū)動(dòng)電流,可以參考圖 12 和 13 來選擇合適的柵極驅(qū)動(dòng)器和 MOSFET 系列。
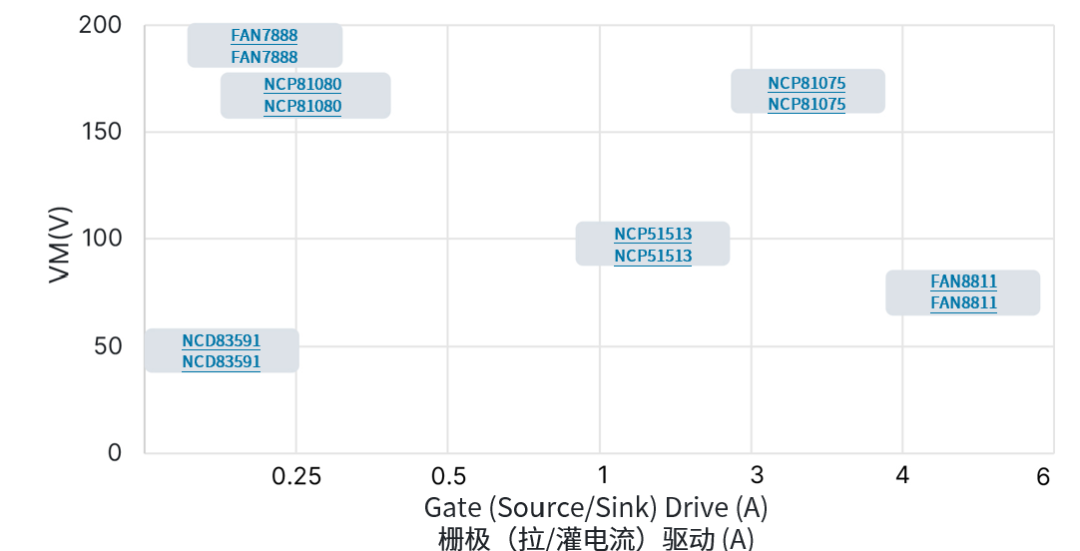
圖 12:安森美 BLDC 控制柵極驅(qū)動(dòng)器產(chǎn)品組合的能力
柵極驅(qū)動(dòng)器 NCD83591
三相柵極驅(qū)動(dòng)器,工業(yè)應(yīng)用的理想之選
工作電壓范圍:5-60V
FET 恒流驅(qū)動(dòng),電流最高可達(dá) 250mA
高達(dá) 30kHz 的電機(jī) PWM,具有單獨(dú)的六柵極控制模式
集成保護(hù):欠壓鎖定,HBM 和 CDM ESD,功率損耗期間內(nèi)部柵極下拉
28 引腳 QFN
恒流驅(qū)動(dòng)提供相同的開關(guān)凈過渡時(shí)間,但省去了串聯(lián)柵極電阻的成本,并且所需的驅(qū)動(dòng)電路更小。無串聯(lián)柵極電阻也有助于防止自導(dǎo)通。
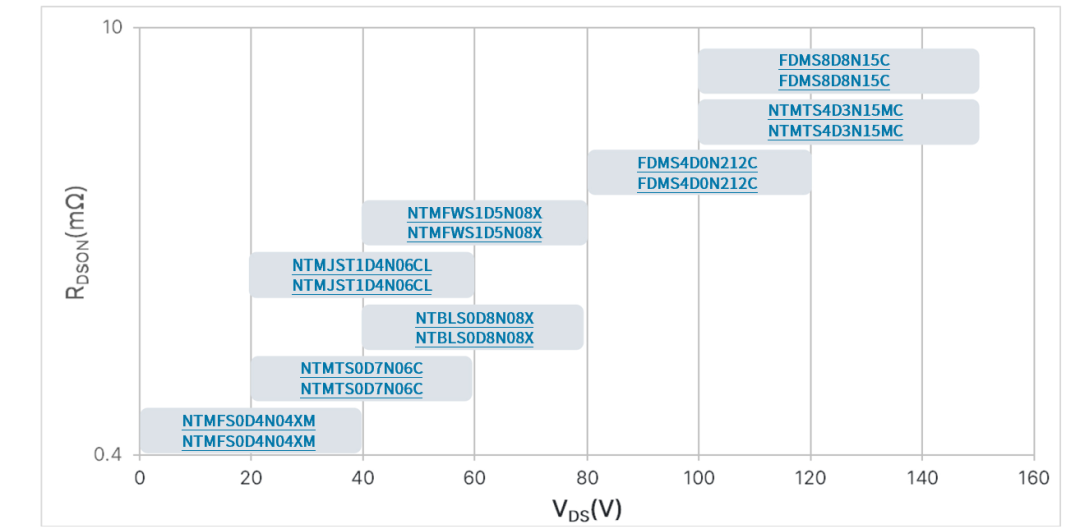
圖 13:用于 BLDC 控制的安森美 MOSFET 產(chǎn)品組合
MOSFET NTMJST2D6N08H
2.8m? RDS(ON)
80V VDS
低電容和柵極電荷 – 降低開關(guān)損耗
TCPAK57 封裝 - 降低 PCB 溫度,因?yàn)闊崃繌捻敳肯ⅲ琍CB 利用率更高
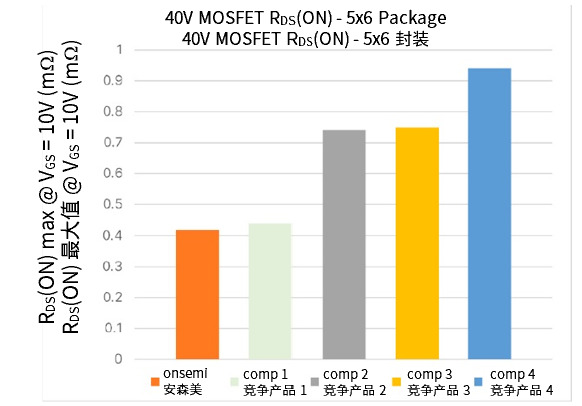
圖 14:40V MOSFET 的 RDS(ON) 比較
MOSFET NTMFS0D4N04XM
出色的 T10M 系列 40V MOSFET,適用于 BLDC 電機(jī)驅(qū)動(dòng)
0.42m? RDS(ON) – 降低導(dǎo)通損耗
5mmx6mm 封裝
優(yōu)越的軟化恢復(fù)能力,低電壓尖峰,減少應(yīng)力和 EMI 問題
-
充電器
+關(guān)注
關(guān)注
100文章
4072瀏覽量
114647 -
安森美
+關(guān)注
關(guān)注
32文章
1648瀏覽量
91936 -
AMR
+關(guān)注
關(guān)注
3文章
423瀏覽量
30186 -
移動(dòng)機(jī)器人
+關(guān)注
關(guān)注
2文章
757瀏覽量
33543 -
AGV
+關(guān)注
關(guān)注
27文章
1280瀏覽量
41008
原文標(biāo)題:超全的智能移動(dòng)機(jī)器人方案,都替您整理好了(內(nèi)附活動(dòng)中獎(jiǎng)名單)
文章出處:【微信號(hào):onsemi-china,微信公眾號(hào):安森美】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論