 手把手教你搭建OpenScenario交通場景(上)
手把手教你搭建OpenScenario交通場景(上)
OpenScenario是一種專為自動駕駛系統仿真測試設計的場景描述語言,它基于XML格式,旨在提供一個標準化、模塊化的框架,用于定義和重現復雜的道路交通場景。該語言不僅能夠詳細描繪車輛、行人、交通信號及其他動態交通參與者的行為模式,還涵蓋了環境條件(如天氣、光照)和道路基礎設施的設定,為自動駕駛系統的驗證提供了豐富且逼真的測試環境。
與OpenDRIVE專注于靜態道路網絡建模不同,OpenScenario更多地聚焦于動態交通場景的構建,它允許開發者靈活設定車輛間的交互邏輯、事故觸發條件、緊急避讓情形等,以全面評估自動駕駛系統在各種極端或異常狀況下的反應能力。通過OpenScenario,開發者能夠創建從簡單的直行、轉彎測試到復雜的城市擁堵、高速公路超車、夜間行駛等多種場景,確保自動駕駛系統在面對真實世界復雜多變的交通環境時,能夠做出安全、合理的決策。
經緯恒潤動力學仿真軟件ModelBase基于OpenScenario1.0標準,開發內嵌了場景編輯器,可用于對仿真測試過程中的車輛行駛道路模型之外,繼續進行周邊動態場景的搭建。從搭建的形式上,軟件支持通過導入OpenScenario1.0格式文件來實現場景的自動復現,然后可利用場景編輯器在此基礎上進行編輯修改,或是從零開始進行動態交通場景的創建。從兩者的關系來看,交通場景依賴于道路模型存在,而在同一個道路模型下,可創建多個不同交通場景,并支持通過選擇激活的形式進行待運行場景間的切換。當然,編輯后的交通場景也可以OpenScenario格式對外導出使用。
下面我們來一起看一下場景編輯器的功能和操作使用方法,場景編輯器的操作界面如下圖所示。

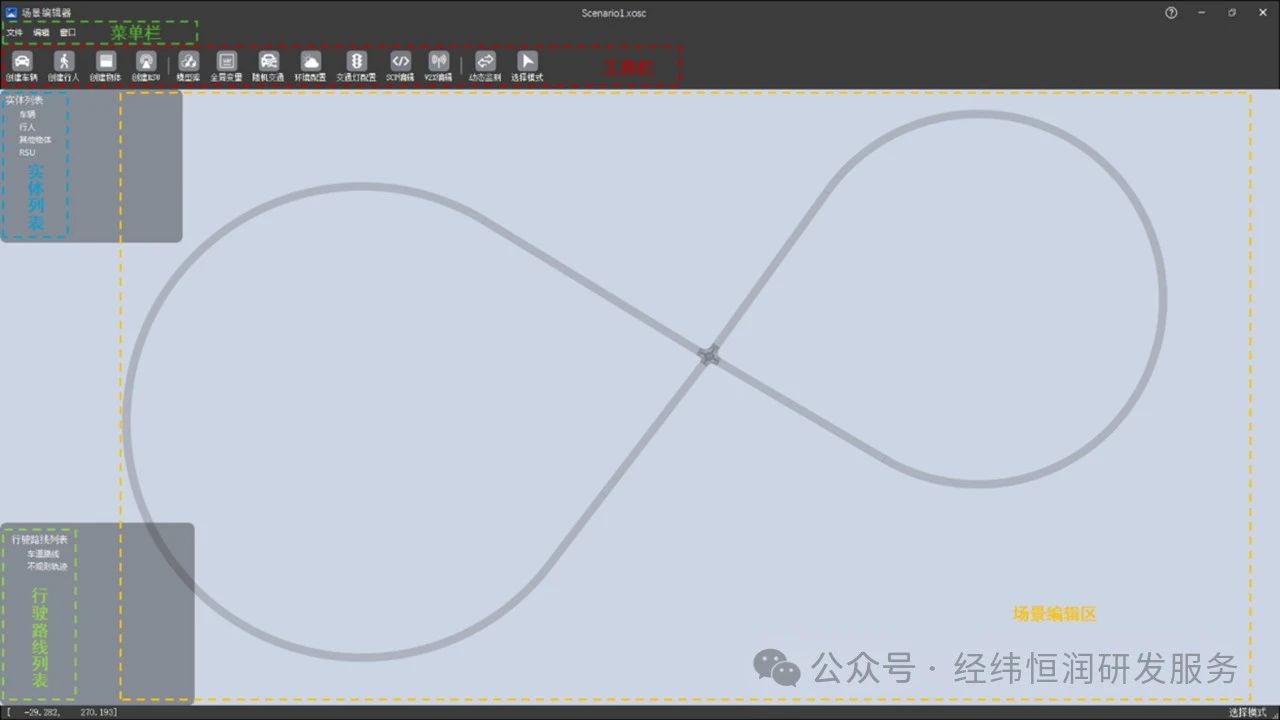
菜單欄
場景編輯器的菜單欄中包括文件、編輯和窗口三個選項,通過將鼠標放著在選項上將自動彈出其對應的下拉選項,然后可使用鼠標左鍵單擊進行具體的功能選擇,其中:
- 文件:用于對場景文件進行操作,包括新建、打開、保存和地址另存為
- 編輯:囊括了工具欄中的場景編輯工具,可在交通場景編輯過程中進行使用
- 窗口:用于管理編輯器布局中窗口的顯示和關閉
工具欄
為便于用戶在交通場景搭建過程中對編輯工具進行快速調用,編輯器將菜單欄--編輯中的工具顯示在工具欄,通過鼠標左鍵單擊可直接進行選擇或切換,包括以下幾個方面。
- 創建車輛
進入車輛模式,點擊后的鼠標光標在編輯器內將變為藍色小車圖標,通過在道路中再次點擊來進行放置,從而實現一個車輛實體的初步創建。創建完成后,界面中將自動彈出“車輛行為設置”對話框,可對車輛信息和行駛路線等初始狀態進行預設,并以“觸發條件+車輛行為”組合的形式對行駛過程中車輛的行為變化情況進行預設,其中需要重點關注的有:
① 在初始狀態--車輛信息中,新增車輛默認為非主車(交通車),將自動生成命名并在編輯器界面中顯示為藍色;通過選擇為主車以后,可通過“名稱”下拉選項與工程中已創建的車輛動力學模型進行綁定,主車在編輯器界面中顯示為黃色,以示與交通車之間的區別。
② 在初始狀態--行駛路線中,選擇“指定不規則軌跡”或“指定車道路線”模式前,需提前定義與之對應的“軌跡”或“路線”,之后可在下拉選項中進行選用。
③ 在觸發條件及行為子界面中,可在車輛行為列表中創建一個或多個event,然后可以測試需求,對event的觸發條件進行定義,并選擇車輛在此階段發生的橫縱向行為變化。另外,也可以通過SCP指令作為一種特殊的行為定義形式,實現對車輛行為或交通場景變化的控制。
- 創建行人
進入行人模式,點擊后的鼠標光標在編輯器內將變為人形圖標,通過在道路中或路旁再次點擊來進行放置,從而實現對一個行人實體的初步創建。創建完成后,界面中將自動彈出“行人行為設置”對話框,可對行人的位置、外觀模型和初速度信息和行駛路線等初始狀態進行預設,并以“觸發條件+行人行為”組合的形式對不同觸發條件下行人的行為變化情況進行預設。例如,可實現定義行人行走的不規則軌跡,然后將觸發條件設置為相對于車輛位置進行觸發,隨后令其行走速度由無到有進行變更,由此可實現行人橫穿道路這一交通場景的搭建。
- 創建物體
進入物體模式,點擊后的鼠標光標在編輯器內將變為物體圖標,通過在道路中或路旁再次點擊來進行放置,從而實現對一個物體實體的初步創建。創建完成后,界面中將自動彈出“物體配置”對話框,可對物體的名稱,外觀(物體模型),放置位置和角度等進行設置。
通過對車輛、行人和物體模型進行選擇,ModelBase支持令這些實體在動畫界面中呈現出不同的外觀樣式,如下圖所示。

- 創建RSU
進入RSU模式,點擊后的鼠標光標在編輯器內將變為RSU圖標,通過在道路中或路旁再次點擊來進行放置,從而實現對一個RSU實體的初步創建。創建完成后,界面中將自動彈出“V2X信號配置”對話框,可用于對場景中車輛的OBU進行開啟/關閉,或對RSU的基礎參數和對外發送的事件信息等進行配置。RSU模塊主要用于V2X仿真測試工況的搭建,上述V2X配置界面也可以通過工具欄中的“V2X編輯”按鈕進行開啟。
在完成上述行為設置后,可通過點擊界面右下角的“確認”按鈕進行關閉,當然,后續如需對實體再次進行修改設置,可通過鼠標左鍵雙擊界面中的實體標志重新打開配置界面。至此,創建實體的方法已介紹完畢,了解更多場景搭建教程,敬請關注《手把手教你搭建OpenScenario交通場景(下)》
ModelBase是經緯恒潤自主研發的綜合駕駛測試仿真軟件,具備車輛動力學模型及智能駕駛場景仿真能力,可用于乘用車、商用車的整車電控系統、ADAS系統的設計、測試和驗證。可以覆蓋電控系統的整個開發周期,包括早期的算法仿真測試(MIL/SIL),控制器的硬件在環測試(HIL),半實物臺架測試(如電機臺架、動力系統臺架、整車臺架等),以及車輛在環測試(VIL)。
-
XML
+關注
關注
0文章
188瀏覽量
33041 -
仿真測試
+關注
關注
0文章
75瀏覽量
11288 -
自動駕駛
+關注
關注
783文章
13682瀏覽量
166137
發布評論請先 登錄
相關推薦
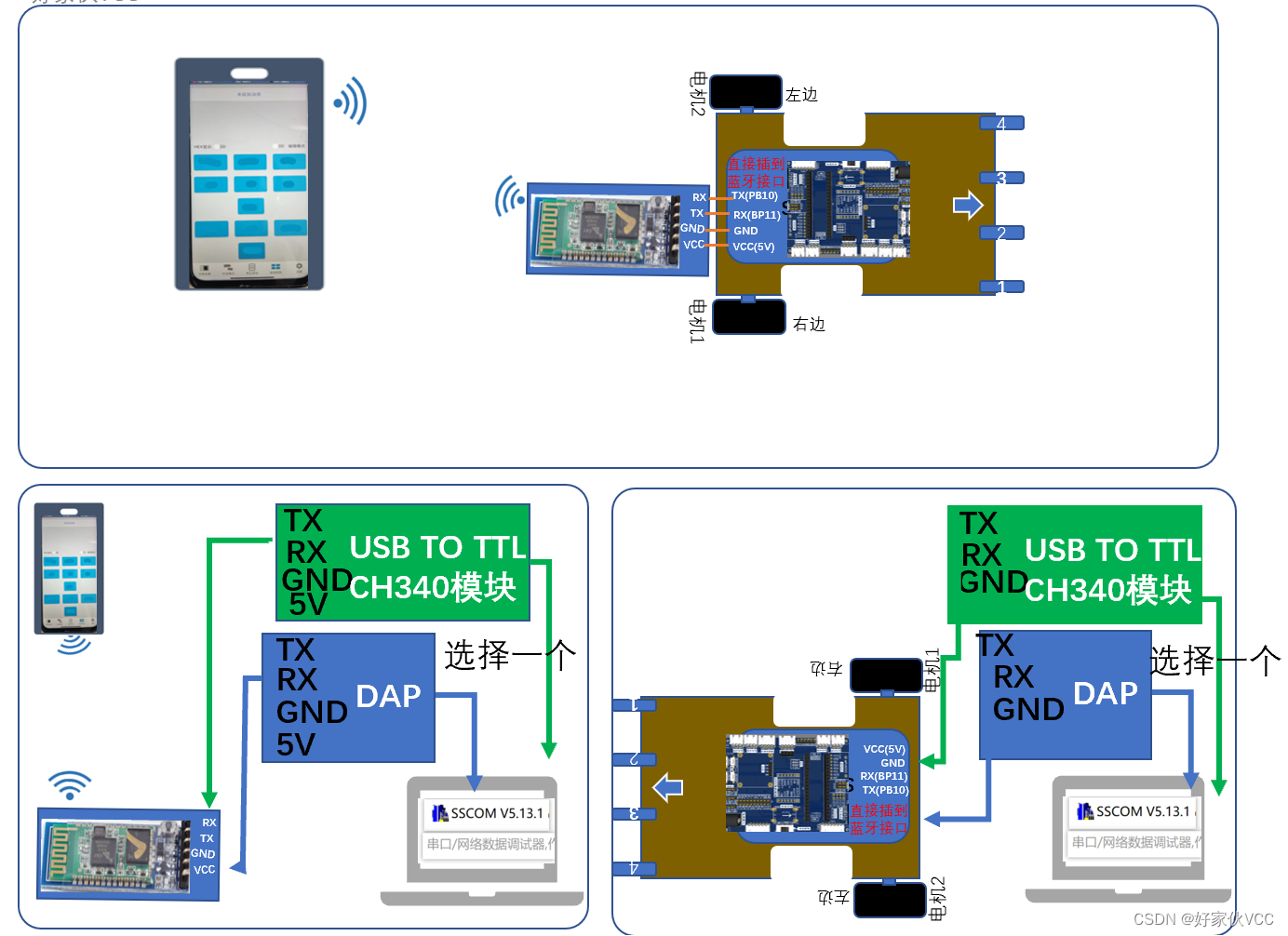
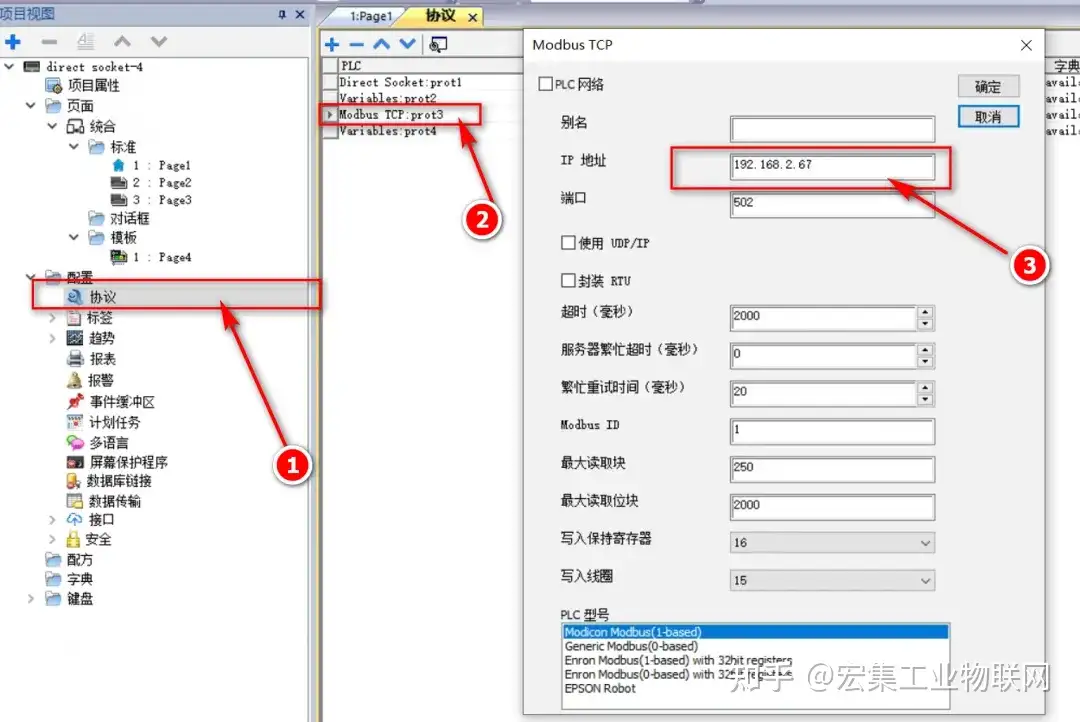
手把手教你通過宏集物聯網工控屏&網關進行協議轉換,將底層PLC/傳感器的數據轉換為TCP協議并傳輸到用戶
手把手教你在orcad中設置CIS元器件數據庫,提高工作效率

手把手教你排序算法怎么寫

手把手帶你移植HAL庫函數
手把手教你PCB上怎么畫GND?

無刷電機無感FOC控制培訓系列課程
【先楫HPM5361EVK開發板試用體驗】(原創)5.手把手實戰AI機械臂
【飛騰派4G版免費試用】4.手把手玩轉QT界面設計
使用DPort-ECT搭建EtherCAT從站step by step

工程送樣!手把手教你用好廣和通RedCap模組FG131&amp;FG132系列

【飛騰派4G版免費試用】3.手把手玩轉制作rootfs根文件系統
手把手教你制作DAPLink

PCB上怎么畫GND?手把手教你畫“GND”






 工商網監
工商網監
評論