") 運(yùn)用MATLAB模型預(yù)測(cè)控制技術(shù)提升風(fēng)力發(fā)電機(jī)運(yùn)行效率
運(yùn)用MATLAB模型預(yù)測(cè)控制技術(shù)提升風(fēng)力發(fā)電機(jī)運(yùn)行效率
基于模型的設(shè)計(jì)對(duì)我們的開(kāi)發(fā)過(guò)程至關(guān)重要……這種方法使我們能夠在全尺寸 3 MW 風(fēng)力發(fā)電機(jī)上測(cè)試控制器的運(yùn)行。
為了到 2050 年實(shí)現(xiàn)凈零排放,風(fēng)能生產(chǎn)需要維持 17% 同比增長(zhǎng)。隨著全球風(fēng)力發(fā)電機(jī)(WT)的總裝機(jī)容量持續(xù)增長(zhǎng),風(fēng)電行業(yè)正在更加注重優(yōu)化長(zhǎng)期運(yùn)營(yíng)效率。這不僅包括最大化電力輸出,還包括最小化制造和維護(hù)成本——同時(shí)確保安全和電網(wǎng)合規(guī)。使用基于比例積分 (PI) 或比例積分微分 (PID) 算法的傳統(tǒng)控制策略幾乎無(wú)法實(shí)現(xiàn)所有這些目標(biāo)。因此,研究小組一直在探索使用更先進(jìn)的控制策略,包括模型預(yù)測(cè)控制(MPC)。
MPC 非常適合 WT 控制應(yīng)用,因?yàn)樗梢詨嚎s優(yōu)化問(wèn)題中的多個(gè)、有時(shí)相互沖突的控制目標(biāo)和約束。事實(shí)上,我們的前同事們之前證明了 MPC 對(duì)風(fēng)力發(fā)電機(jī)控制的有效性通過(guò)使用基于模型的控制器設(shè)計(jì)和快速控制原型。
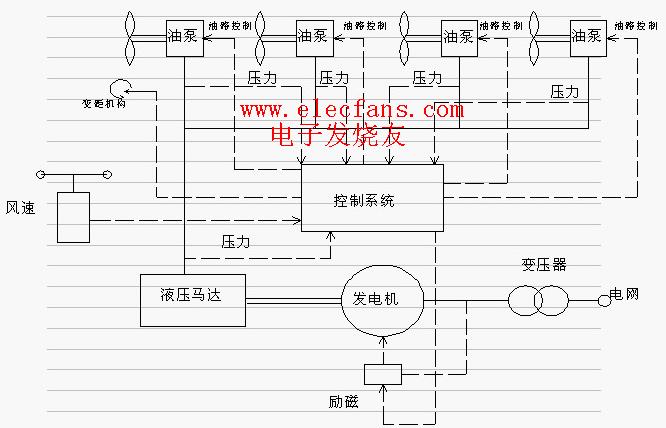
最近,我們(亞琛工業(yè)大學(xué)自動(dòng)控制研究所的研究人員和 W2E Wind toEnergy GmbH 的工程師團(tuán)隊(duì))擴(kuò)展了這項(xiàng)早期工作,將機(jī)器學(xué)習(xí)回歸模型集成到 MPC 中。通過(guò)此項(xiàng)改進(jìn),控制器主動(dòng)調(diào)整葉片螺距角和發(fā)電機(jī)扭矩,以最大限度地減少風(fēng)力發(fā)電機(jī)的負(fù)載交替,旨在降低長(zhǎng)期磨損和損壞風(fēng)險(xiǎn)。我們使用的算法源自 IntelliWind 研究項(xiàng)目,資助編號(hào)為 01IS22028A/B。基于模型的設(shè)計(jì)對(duì)我們的開(kāi)發(fā)過(guò)程起到了重要作用:我們使用了 MATLAB 訓(xùn)練機(jī)器學(xué)習(xí)模型,將 MPC 內(nèi)部預(yù)測(cè)模型的動(dòng)態(tài)狀態(tài)映射到轉(zhuǎn)子推力的變化, Simulink 和 Model Predictive ControlToolbox 對(duì)控制器進(jìn)行建模和廣泛模擬,并使用 Simulink Coder 生成代碼以部署在 Bachmann 工業(yè)控制系統(tǒng)上。這種方法使我們能夠在由 W2E Wind toEnergy 運(yùn)營(yíng)的全尺寸 3 MW WT 上測(cè)試控制器的運(yùn)行(圖 1),這是驗(yàn)證該新型控制器設(shè)計(jì)是否可投入生產(chǎn)的重要一步。
▼
訓(xùn)練機(jī)器學(xué)習(xí)模型并將其納入 MPC
MPC 的性能和穩(wěn)定性在很大程度上受到其預(yù)測(cè)模型的準(zhǔn)確性和保真度的影響。鑒于保真度較高的模型通常需要更多計(jì)算,因此 MPC 設(shè)計(jì)需要權(quán)衡。例如,將 WT 的完整計(jì)算流體動(dòng)力學(xué)模型納入 MPC 是不切實(shí)際的,因?yàn)閺倪@種模型生成預(yù)測(cè)所需的時(shí)間可能遠(yuǎn)遠(yuǎn)超過(guò)控制器的采樣時(shí)間。
為了解決保真度和計(jì)算強(qiáng)度之間的設(shè)計(jì)權(quán)衡,我們使用了機(jī)器學(xué)習(xí)模型(具體來(lái)說(shuō)是局部線性神經(jīng)模糊模型 LLNFM)來(lái)快速預(yù)測(cè)渦輪轉(zhuǎn)子推力的變化。在 MPC 中,我們將此 LLNFM 與 WT 的非線性降階模型相結(jié)合(圖 2)。然而,在將其納入我們的控制設(shè)計(jì)之前,我們首先需要訓(xùn)練機(jī)器學(xué)習(xí)模型。
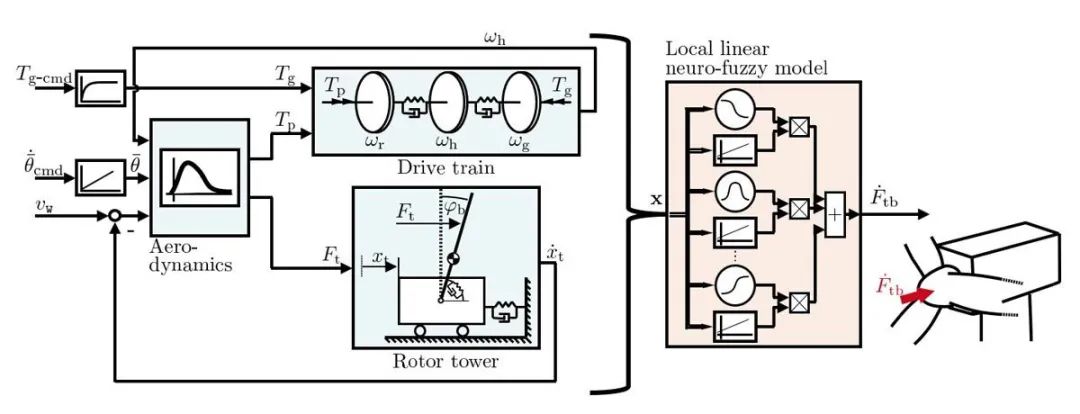
圖 2. 將局部線性神經(jīng)模糊模型(右)與降階模型(左)相結(jié)合,該模型由 WT 傳動(dòng)系統(tǒng)動(dòng)力學(xué)機(jī)械子模型、轉(zhuǎn)子塔和葉片動(dòng)力學(xué)機(jī)械子模型以及空氣動(dòng)力學(xué)第三子模型組成。
訓(xùn)練任何機(jī)器學(xué)習(xí)模型(包括我們的 LLNFM)都需要數(shù)據(jù)。我們使用以下方法生成合成訓(xùn)練數(shù)據(jù) alaska/Wind 軟件,我們?cè)谠撥浖懈鶕?jù)外部風(fēng)力對(duì)轉(zhuǎn)子上的內(nèi)部負(fù)載進(jìn)行建模和模擬。具體來(lái)說(shuō),我們進(jìn)行了模擬,以測(cè)量各種風(fēng)況(包括不同的速度以及極端的運(yùn)行陣風(fēng))下轉(zhuǎn)子上的推力。然后我們將這些數(shù)據(jù)導(dǎo)入 MATLAB 并進(jìn)行預(yù)處理。預(yù)處理步驟包括計(jì)算時(shí)間導(dǎo)數(shù)(因?yàn)槲覀兿朐诟淖冇?jì)算推力隨時(shí)間的變化)并應(yīng)用低通濾波器消除由風(fēng)的隨機(jī)因素引起的高頻份額(圖 3)。
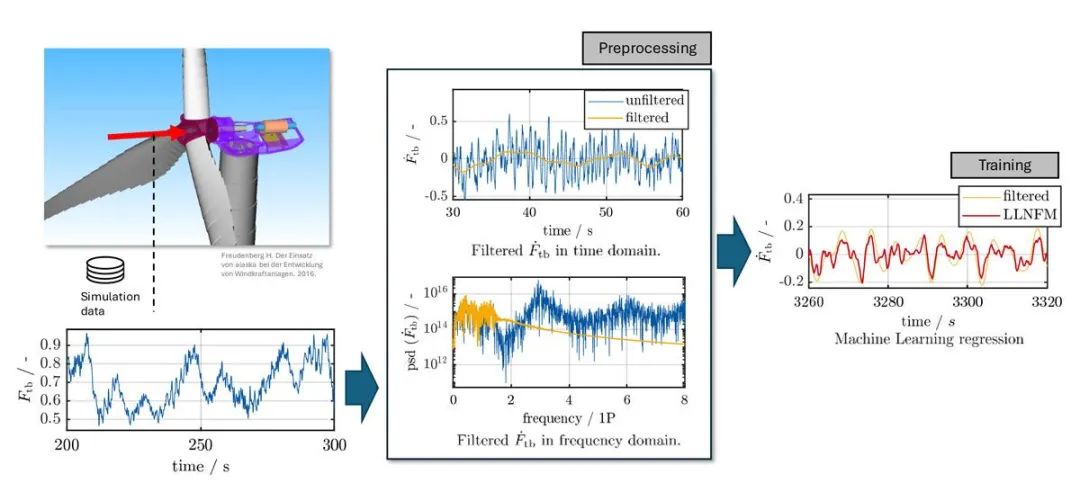
圖 3. 工作流程概述:捕獲模擬數(shù)據(jù),預(yù)處理數(shù)據(jù),然后使用它來(lái)訓(xùn)練局部線性神經(jīng)模糊模型。
我們使用 LOLIMOT(局部線性模型樹(shù))算法構(gòu)建并訓(xùn)練了 LLNFM,該算法由 LMN-Tool,來(lái)自錫根大學(xué)的 MATLAB 工具箱。我們使用 LLNFM,因?yàn)樗矸蔷€性關(guān)系,但與其他機(jī)器學(xué)習(xí)技術(shù)相比提供了可管理的復(fù)雜性。這帶來(lái)了更高的可解釋性,這在現(xiàn)實(shí)世界的控制應(yīng)用中是一個(gè)優(yōu)勢(shì),因?yàn)樵谶@樣的應(yīng)用中,最大限度地降低對(duì)工廠造成任何潛在損害的風(fēng)險(xiǎn)是一個(gè)關(guān)鍵關(guān)注點(diǎn)。
一旦我們訓(xùn)練并驗(yàn)證了 LLNFM,我們就會(huì)使用符號(hào)框架 CasADi 根據(jù)模型創(chuàng)建符號(hào)表達(dá)式,并根據(jù)系統(tǒng)狀態(tài)計(jì)算模型的雅可比矩陣。我們創(chuàng)建了一個(gè) S-函數(shù)基于該模型的符號(hào)表達(dá)及其雅可比矩陣。在 Simulink 中,此 S-函數(shù)被調(diào)用來(lái)獲取控制器擴(kuò)展卡爾曼濾波器 (EKF) 中的線性化狀態(tài)空間模型,并由自適應(yīng) MPC 控制器塊來(lái)估計(jì)操作條件變化時(shí)的預(yù)測(cè)模型狀態(tài)(圖 3)。
▼
模擬和調(diào)節(jié)控制器
將機(jī)器學(xué)習(xí)模型集成到 MPC 后,我們的下一步是運(yùn)行模擬來(lái)調(diào)整控制器并評(píng)估其性能。該控制器的設(shè)計(jì)目的是最大限度地提高功率輸出,同時(shí)最大限度地減少結(jié)構(gòu)負(fù)荷。
我們以從切入風(fēng)速到切出風(fēng)速的各種風(fēng)速進(jìn)行了多次模擬。然后,我們?cè)?MATLAB 中分析結(jié)果,并將新的機(jī)器學(xué)習(xí)增強(qiáng)型 MPC 與現(xiàn)有 MPC 和基線經(jīng)典控制系統(tǒng)的性能進(jìn)行了比較。雖然機(jī)器學(xué)習(xí)增強(qiáng)型 MPC 對(duì)部分負(fù)載狀態(tài)(風(fēng)速較低)下的推力動(dòng)態(tài)影響很小,但在滿載狀態(tài)(風(fēng)速較高)下,它降低了主要第一塔特征模態(tài)周圍頻率范圍內(nèi)的推力動(dòng)態(tài)(圖 4)。模擬結(jié)果表明,機(jī)器學(xué)習(xí)增強(qiáng)型 MPC 產(chǎn)生的功率與現(xiàn)有 MPC 相似(圖 5)。
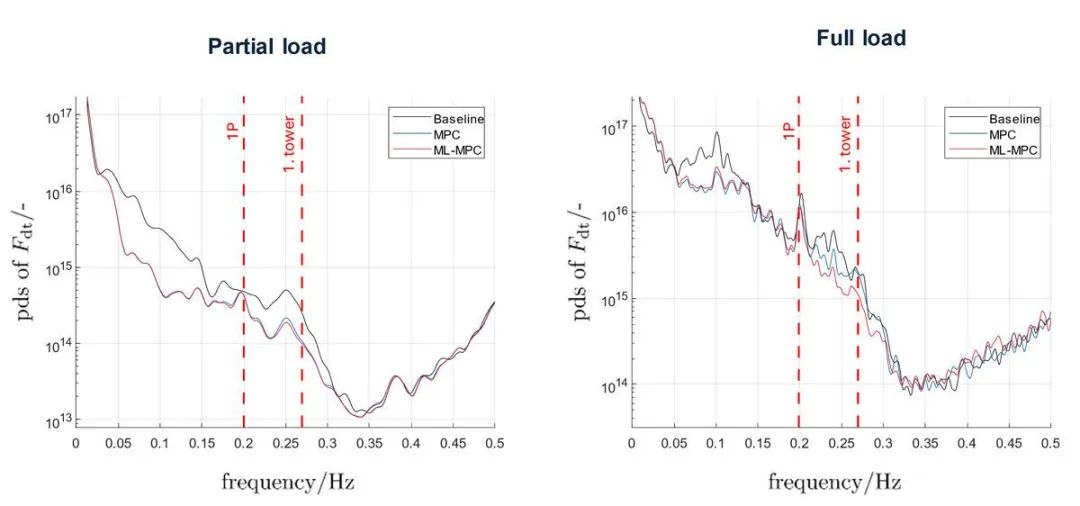
圖 4. 三種類型的控制器在部分負(fù)載條件(左)和滿負(fù)載條件(右)下的推力功率譜密度圖:基線(黑色)、無(wú)機(jī)器學(xué)習(xí)的 MPC(藍(lán)色)和有機(jī)器學(xué)習(xí)的 MPC(紅色)。
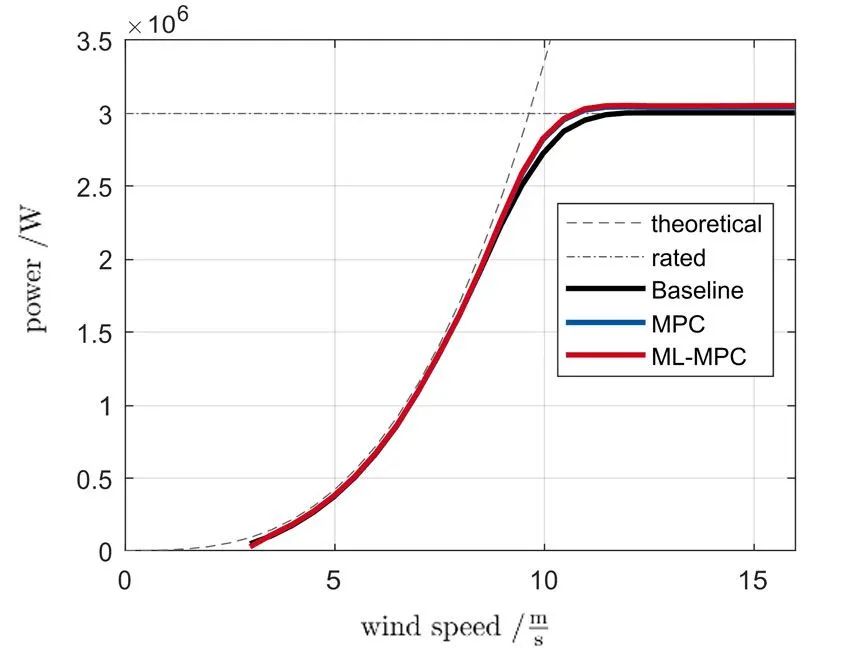
圖 5. 不同風(fēng)速下的模擬功率輸出圖,顯示機(jī)器學(xué)習(xí)增強(qiáng)型 MPC(紅色)、無(wú)機(jī)器學(xué)習(xí)的 MPC(藍(lán)色)和基線控制(黑色)替代方案的輸出相似。
▼
在真實(shí)的風(fēng)力發(fā)電機(jī)上部署和測(cè)試
雖然模擬讓我們對(duì)控制設(shè)計(jì)充滿信心,但了解它在真實(shí) WT 上的表現(xiàn)以及評(píng)估其在真實(shí)操作條件下的穩(wěn)健性對(duì)我們的研究項(xiàng)目也至關(guān)重要。為了實(shí)現(xiàn)這一目標(biāo),我們使用了 Simulink Coder Simulink 的 M-Target 從我們的控制器生成代碼,用于安裝在 W2E Wind to Energy WT 中的 BachmannElectronic GmbH 的 MH230 PLC。現(xiàn)場(chǎng)試驗(yàn)進(jìn)展順利,證實(shí)了全尺寸風(fēng)力發(fā)電機(jī)組在部分負(fù)荷和滿負(fù)荷條件下的穩(wěn)定運(yùn)行(圖 6)。
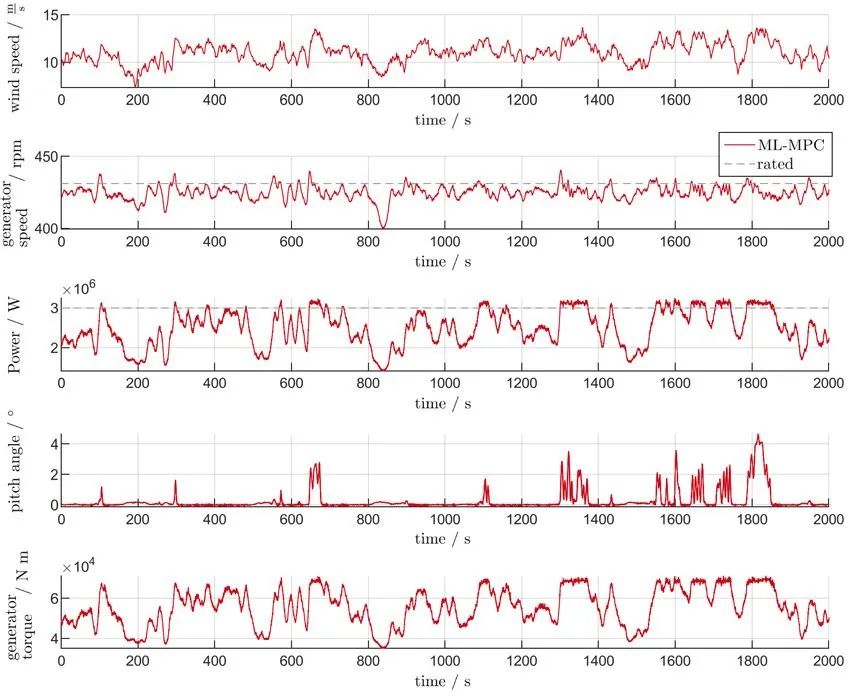
圖 6. 控制羅斯托克 3 MW 風(fēng)力發(fā)電機(jī)的新機(jī)器學(xué)習(xí)增強(qiáng)型 MPC 的實(shí)驗(yàn)現(xiàn)場(chǎng)測(cè)試結(jié)果。
因此,在這個(gè)第一個(gè)概念驗(yàn)證中,我們展示了在全面 WT 上的高級(jí) MPC 算法中使用機(jī)器學(xué)習(xí)擴(kuò)展的普遍可能性。這將使我們能夠在未來(lái)的實(shí)驗(yàn)中測(cè)試更復(fù)雜的機(jī)器學(xué)習(xí)算法,并進(jìn)一步改善風(fēng)力發(fā)電機(jī)的運(yùn)行。
近期,我們期待對(duì) WT 進(jìn)行更廣泛的現(xiàn)場(chǎng)測(cè)試,并有機(jī)會(huì)進(jìn)一步優(yōu)化和調(diào)整控制器。我們還在探索其他幾種潛在的改進(jìn)方法,包括使用激光雷達(dá)傳感器為控制器提供更準(zhǔn)確的風(fēng)傳播估計(jì),以及使用單獨(dú)的葉片螺距控制(而不是集體葉片螺距控制)來(lái)進(jìn)一步提高控制精度和性能。
-
matlab
+關(guān)注
關(guān)注
182文章
2963瀏覽量
230192 -
控制器
+關(guān)注
關(guān)注
112文章
16214瀏覽量
177476 -
風(fēng)力發(fā)電機(jī)
+關(guān)注
關(guān)注
6文章
192瀏覽量
20895
原文標(biāo)題:風(fēng)能管理 | 利用 MATLAB 通過(guò)模型預(yù)測(cè)控制優(yōu)化風(fēng)力發(fā)電機(jī)的效率
文章出處:【微信號(hào):MATLAB,微信公眾號(hào):MATLAB】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
風(fēng)力發(fā)電機(jī)維護(hù)
風(fēng)力發(fā)電機(jī)設(shè)計(jì)與運(yùn)行維護(hù)
垂直軸風(fēng)力發(fā)電機(jī)的應(yīng)用
開(kāi)關(guān)磁阻風(fēng)力發(fā)電機(jī)概述
風(fēng)力發(fā)電機(jī)組建模仿真
基于Matlab的雙饋異步風(fēng)力發(fā)電機(jī)風(fēng)電場(chǎng)仿真 相關(guān)資料分享
無(wú)刷雙饋發(fā)電機(jī)的matlab仿真模型研究 相關(guān)資料分享
基于MATLAB的風(fēng)力發(fā)電系統(tǒng)仿真研究
Matlab風(fēng)力發(fā)電機(jī)模型【含Matlab源碼】 精選資料下載
【源碼】風(fēng)力發(fā)電機(jī)模型 精選資料分享
【源碼】風(fēng)力發(fā)電機(jī)模型version 2.5.0.0 精選資料分享
Matlab雙饋異步風(fēng)力發(fā)電機(jī)建模s函數(shù) 精選資料下載
風(fēng)力發(fā)電機(jī)原理
雙饋風(fēng)力發(fā)電機(jī)模型預(yù)測(cè)控制
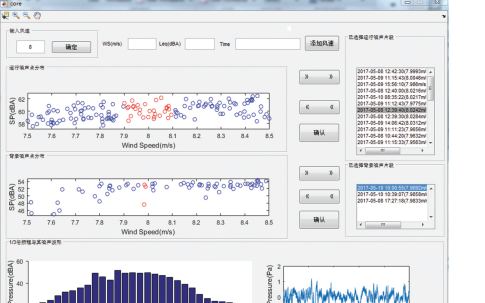
基于MATLAB實(shí)現(xiàn)對(duì)風(fēng)力發(fā)電機(jī)噪聲的倍頻程分析處理





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論