 MS41949——四通道、超低噪聲、256 細分、低壓 5V、微步進電機驅動
MS41949——四通道、超低噪聲、256 細分、低壓 5V、微步進電機驅動
產品簡述
MS41949 是一款四通道、低壓 5V 步進電機驅動芯片,可
以驅動四個步進電機。通過具有電流細分的電壓驅動方式以及
扭矩紋波修正技術,實現超低噪聲微步進電機驅動。
之和低至 1Ω。
主要特點
?電壓驅動方式,256 細分微步進驅動電路
(四通道八個 H 橋)每個 H 橋最大驅動電流±0.8A
?四線串行總線通信控制電機
?負載電壓范圍 2.7V?5.5V
?內置直流電機驅動,最大驅動電流±0.5A
?QFN48 封裝(背部散熱片)
應用
?機器人,精密工業設備
?攝像機
?監控攝像機
產品規格分類

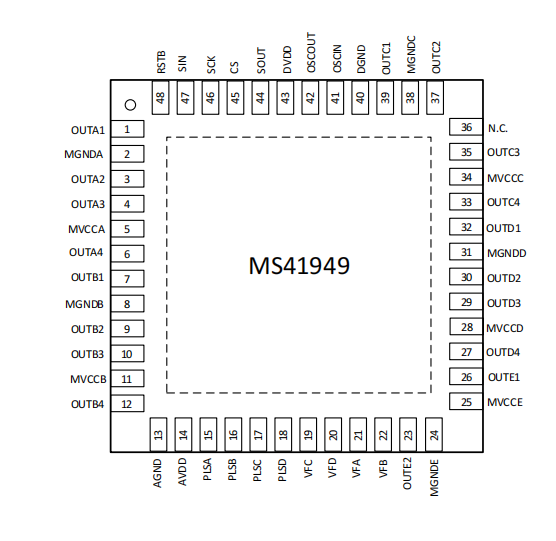
管腳圖
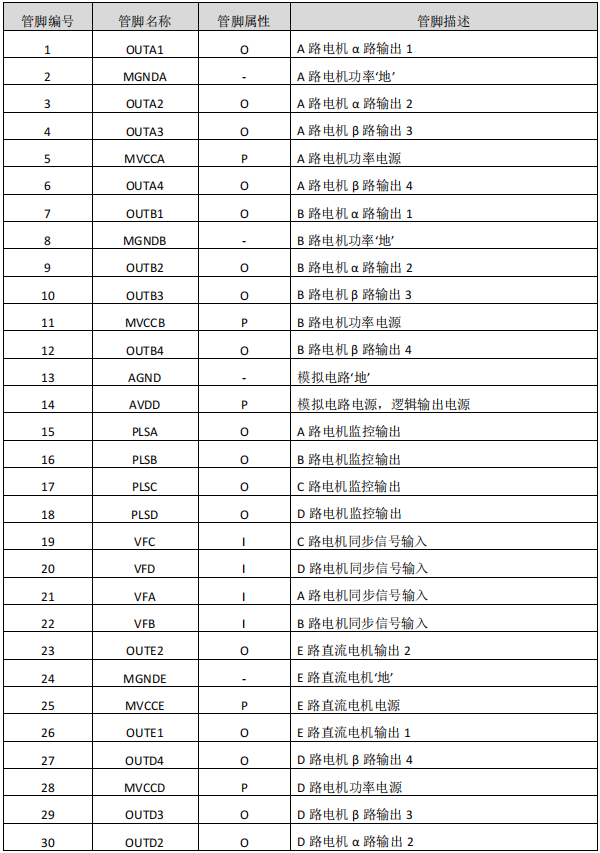
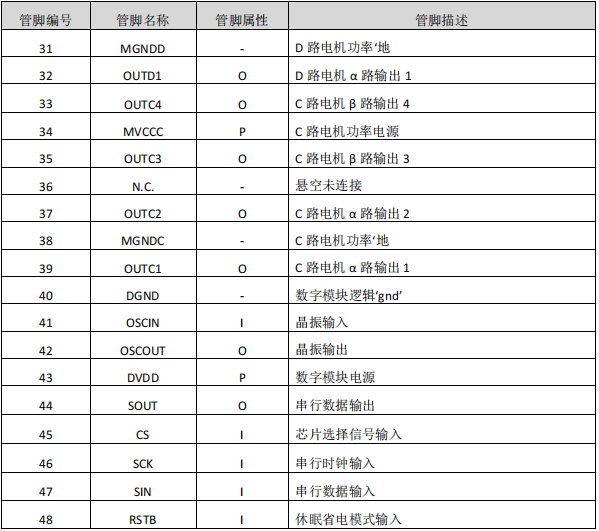
管腳說明
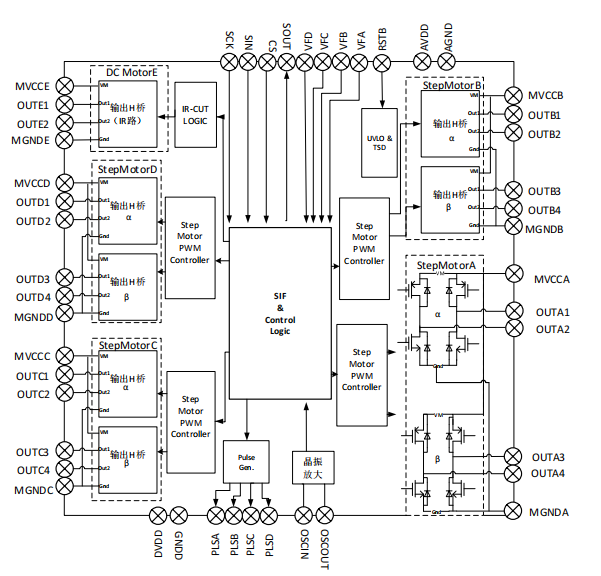
內部框圖
極限參數
絕對最大額定值
芯片使用中,任何超過極限參數的應用方式會對器件造成永久的損壞,芯片長時間處于極限工作
狀態可能會影響器件的可靠性。極限參數只是由一系列極端測試得出,并不代表芯片可以正常工作在
此極限條件下。
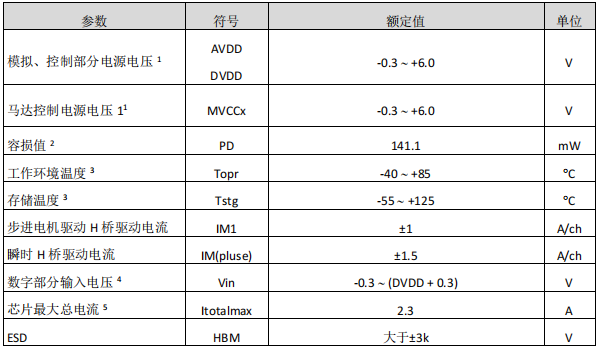
注:1. 絕對最大額定值,是指在容損范圍內使用的場合。
2. 容損值,是指在 Ta = 85°C 時封裝單體的值。實際使用時,希望在參考技術資料和 PD – Ta 特性圖的
基礎上,依據電源電壓、負荷、環境溫度條件,進行不超過容損值的散熱設計。
3. 容損值,工作環境溫度,以及存儲溫度的項目以外,所有溫度為 Ta = 25°。
4. 輸入電壓(DVDD+0.3)電壓不可超過 6.0V。
5. 出于散熱考慮,芯片恒定工作的平均總電流不要超過 2A,如果超過 2A,對 PCB 的散熱要求更高。
工作電源電壓范圍
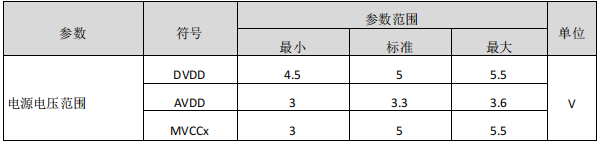
注:DVDD 一般情況下為 5V 供電,如果使用 3.3V 供電,OSC 系統時鐘最高頻率 20MHz,推薦使用
16MHz。
端子容許電流電壓范圍
注意: —應用中任何情況下都不允許超過下表中的最大額定值
—額定電壓值,是指對 GND 的各端子的電壓。GND 是指 AGND、DGND、MGNDx 的電壓。
—在下面沒有記述的端子以外,嚴禁從外界輸入電壓和電流。
—關于電流,“+”表示流向 IC 的電流,“-”表示從 IC 流出的電流。
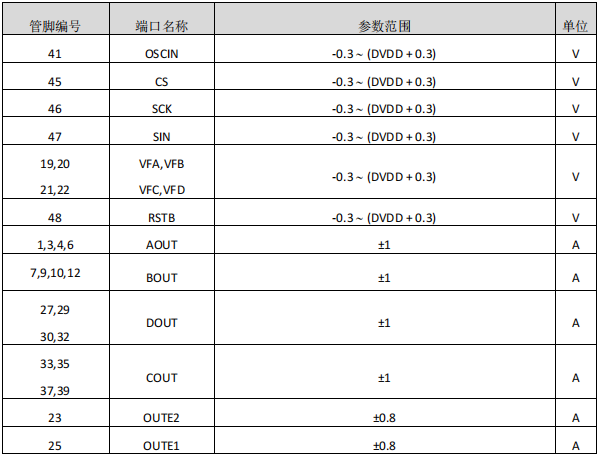
注:(DVDD + 0.3)電壓不可超過5.5V。
電氣參數
MVCCx=VDD5=5V, AVDD=3.3V, DVDD=5V
注意:沒有特別規定,環境溫度為 Ta = 25°C ±2°C。
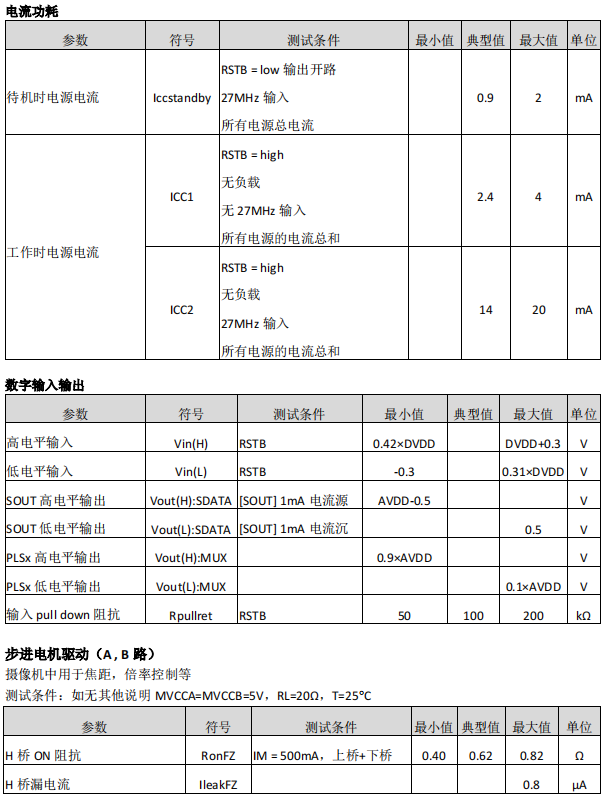
直流電機驅動(DC motor E路)
攝像機中常用于IR-CUT
測試條件:如無其他說明 MVCCE=5V,RL=20Ω,T=25°C
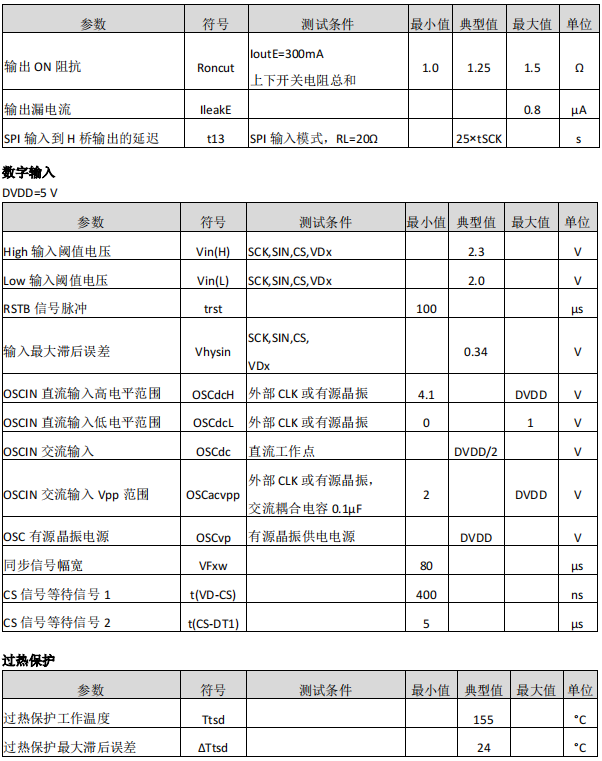

功能描述
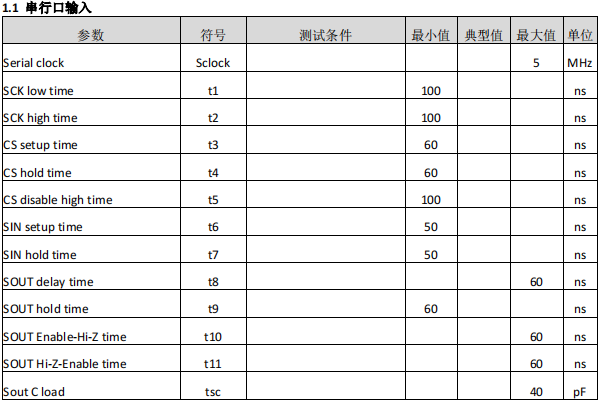
1. 串行接口
注:1. 讀寫模式中,每個周期 CS 默認都是從 0 開始的。
2. 寫模式時,必須從 OSCIN 端輸入系統時鐘。
電氣參數(設計參考值)
MVCCx = 5V, DVDD = 5V, AVDD = 3.3V
注意:沒有特別規定,環境溫度為 Ta = 25°C ±2°C。本特性為設計參考值,僅供參考。
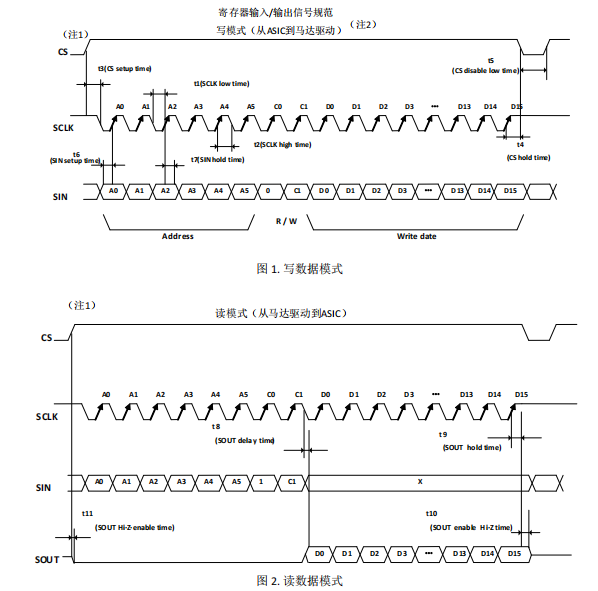
1. 數據轉換在 CS 的上升沿開始,在 CS 的下降沿停止。
2. 一次轉換的數據流單位是 24 位。
3. 從 SIN 引腳輸入地址和數據時,在 CS = 1 的條件下,時鐘信號 SCK 保持一致。
4. 在 SCK 信號的上升沿,數據被打入 IC。同時,數據輸出時,在 SOUT 引腳讀出(數據在 SCK 的上升
沿輸出)。
5. 當 CS=0 時,SOUT 輸出高阻態。并且當 CS=1 時,輸出“0”除非有數據讀出。
6. 當 CS=0 時,復位整個串行接口控制。
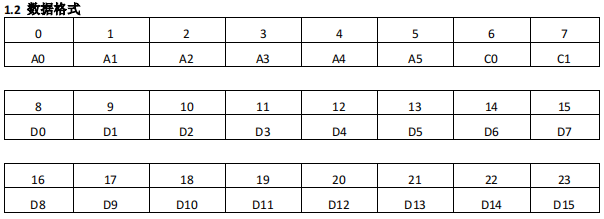
C0:寄存器讀寫選擇: 0:寫模式;1:讀模式
C1:不使用
A5?A0:寄存器地址
D15?D0:寫入寄存器的數據
* 0→1:起作用于DT1x;1→0:起作用于DT2x
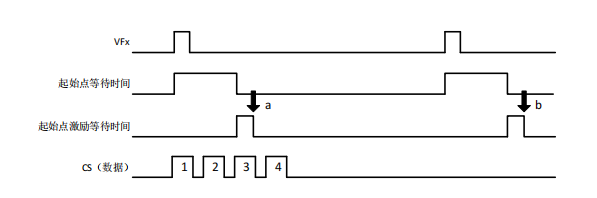
原則上來說,用于細分步進的寄存器的建立,應該在起始點延時的這段時間段內執行完(參考18
頁圖)。在起始點延時這段時間外,寫入的數據也能被存入寄存器。然而,如果寫操作在刷新時間后
繼續執行的話,好比在起始點激勵延時的最后,建立刷新時刻不會在計劃的時刻有效。舉例說明:如
果在起始點激勵延時后更新的數據1?4如下圖一樣被寫入,數據1和2在a時刻立即被更新,數據3和4在b
時刻被更新。即使數據是連續寫入的,更新的時間間隔了1個VFx的周期。
由于上述原因,為了數據及時更新,寄存器數據的建立需要在起始點延時的這段時間段執行完。
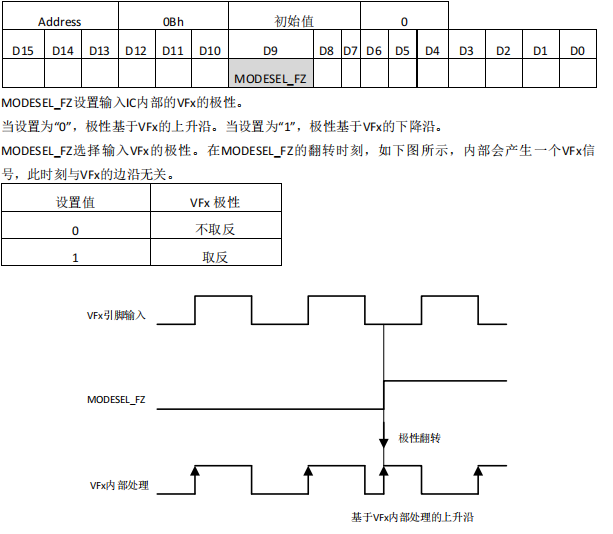
2. VFx信號內部處理
這個系統中,步進電機的反應時間和旋轉時間分別基于VFx的上升沿。VFx的極性能通過下面的寄
存器設置。
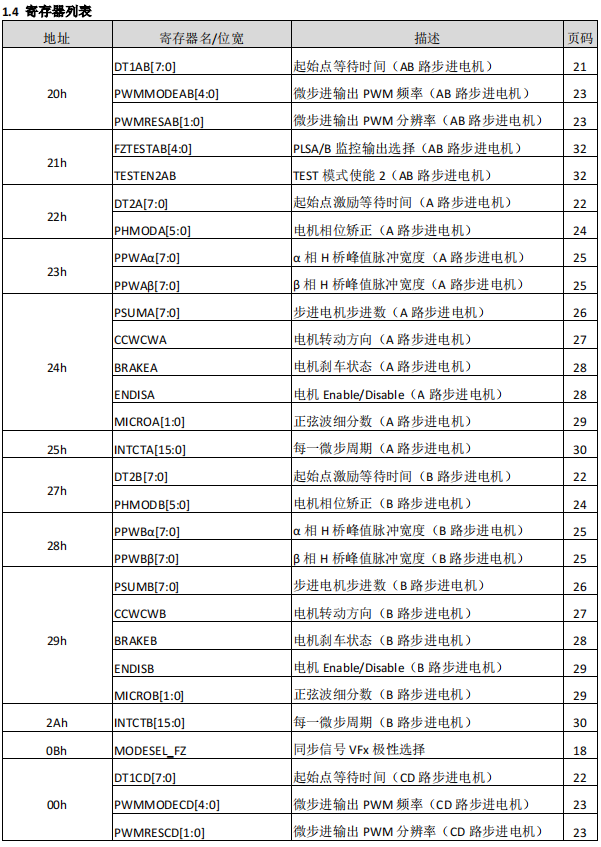
寄存器細節描述
MODESEL_FZ (VFx 極性選擇)
3. 步進電機細分步進驅動
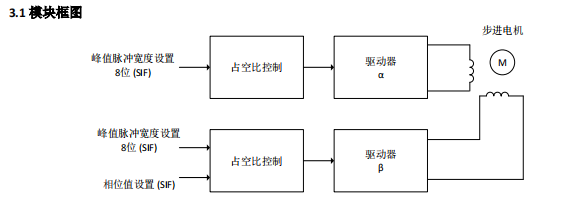
上圖中模塊是一個步進電機驅動內部示意圖。下面的一些設置可以用來執行一系列的控制
(下面是對 A 通道步進電機:H 橋驅動器 α/β 的描述。通道 B,C,D 與通道 A 電機執行一樣的算法)
主要的設置參數:
相位矯正:驅動器 α 和驅動器 β 的相位差目標在 90°;
可以實現-22.5°? +21.8°的相位修正 。 ——>PHMODx[5:0]
幅度設置:能獨立設置驅動器 α/β 的負載驅動電流 ——>PPWAα[7:0],PPWAβ[7:0]
PWM 頻率:驅動器輸出的 PWM 波頻率設置 ——>PWMMODEAB[4:0],PWMRESAB[1:0]
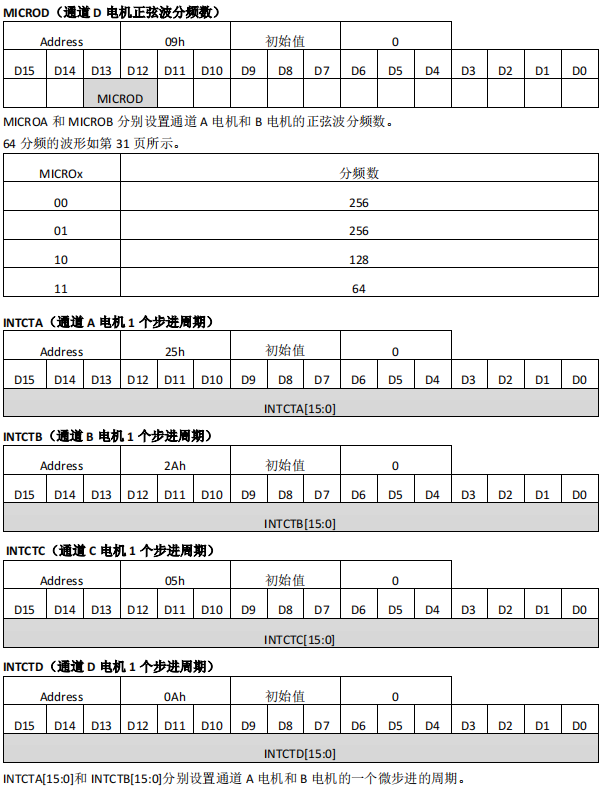
微步進分頻數:微步數能設置成 64,128 和 256 微步進模式 ——>MICROAB[1:0]
步進周期:電機旋轉速度設置。
電機旋轉速度與正弦波的的微步進模式無關 ——>INTCTA[15:0]
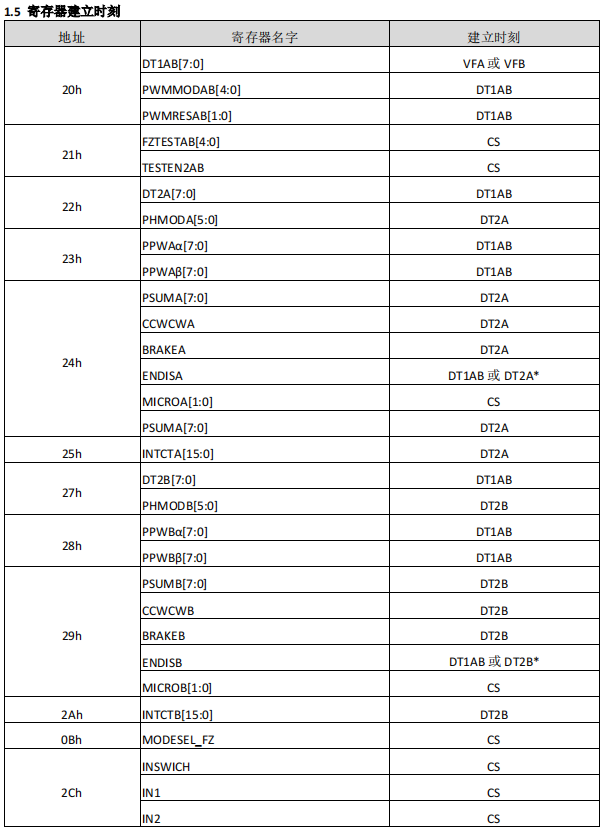
3.2 相關設置的建立時刻
建立時刻和相關時間如下所示
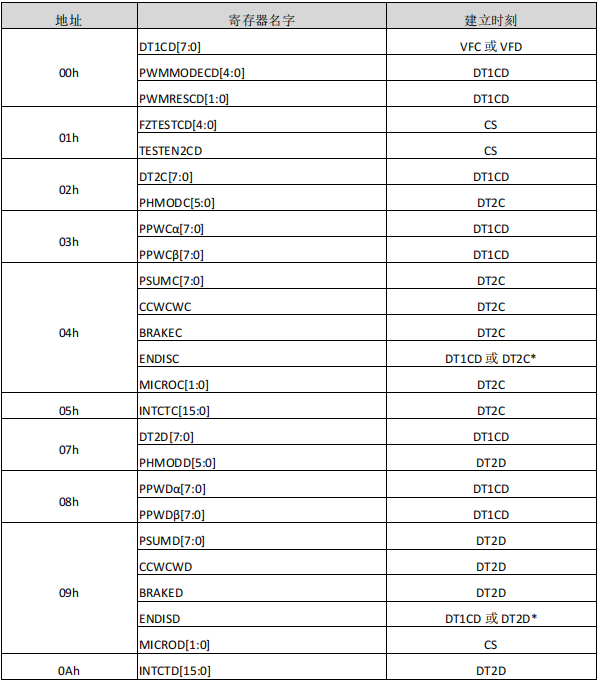
地址 07h 到 0Ah 的設置同 02h 到 05h 的設置相同,所以 07h 到 0Ah 的描述就省略了。如果相關寄
存器被刷新,則每一個 VF 周期來到時,會實現一次設置的加載刷新。當同樣的設置被執行時超過 2 個
VF 脈沖時,沒有必要在每個 VF 脈沖都寫入寄存器數據。
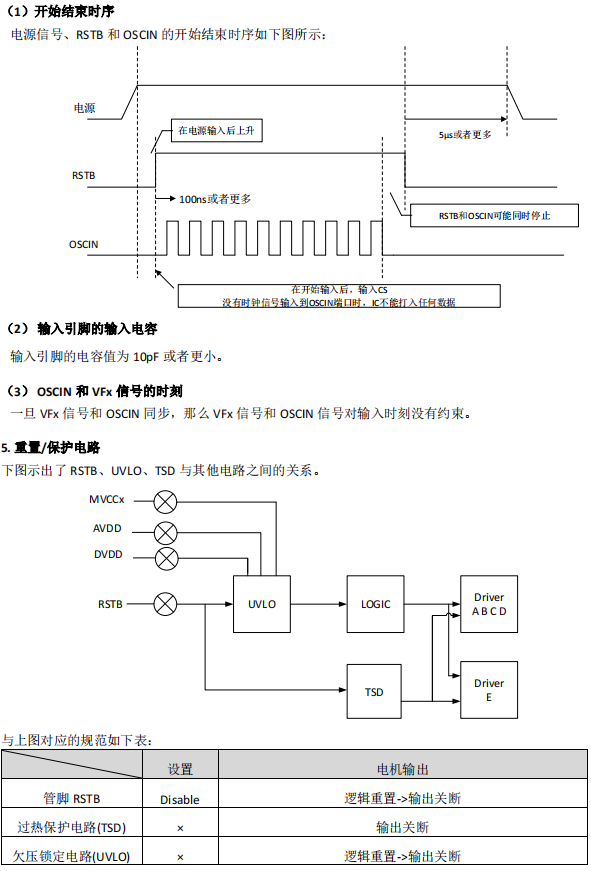
DT1AB[7:0](起始點延時,地址 20h)
更新數據時間設置。在系統硬件復位后(48 引腳 RSTB:低→高),開始激勵和驅動電機前
(DT1AB 結束),必須設置此項。
由于這個設置在每次 VF 脈沖來到時更新,沒有必要一定在起始點延遲時間段內寫入。
PWMMODEAB[4:0],PWMRESAB[1:0](微步進輸出 PWM 波頻率,地址 20h)
設置微步進輸出 PWM 波頻率。需要在開始激勵和驅動電機前設置執行(DT1AB 結束)。
DT2A[7:0](起始點激勵延時,地址 22h)
更新數據時間設置。復位后(48 引腳 RSTB:低→高),需要在開始激勵和驅動電機前被設置執行
(DT1AB 結束)。
PHMODA[5:0](相位矯正,地址 22h)
通過矯正線圈 α 和 β 的相位差,驅動器產生的噪聲會減少。合適的相位矯正必須依據于電機的旋
轉方向和速度,此設置需要隨著旋轉方向 (CCWCWA)或者旋轉速度 (INTCTA)的變化而改變。
PPWAα[7:0],PPWAβ[7:0](峰值脈沖寬度,地址 23h)
設置 PWM 最大占空比。設置需要在開始激勵和驅動電機前被設置執行(DT1AB 結束)。
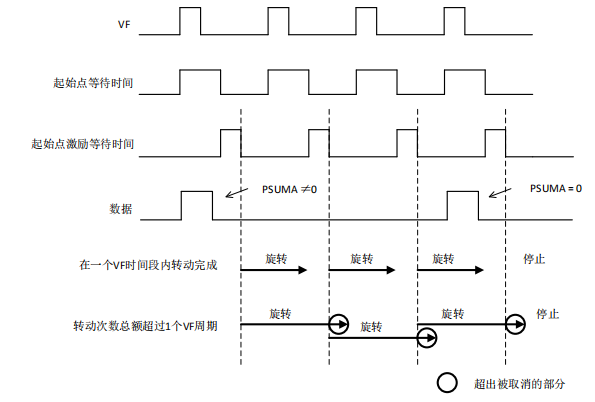
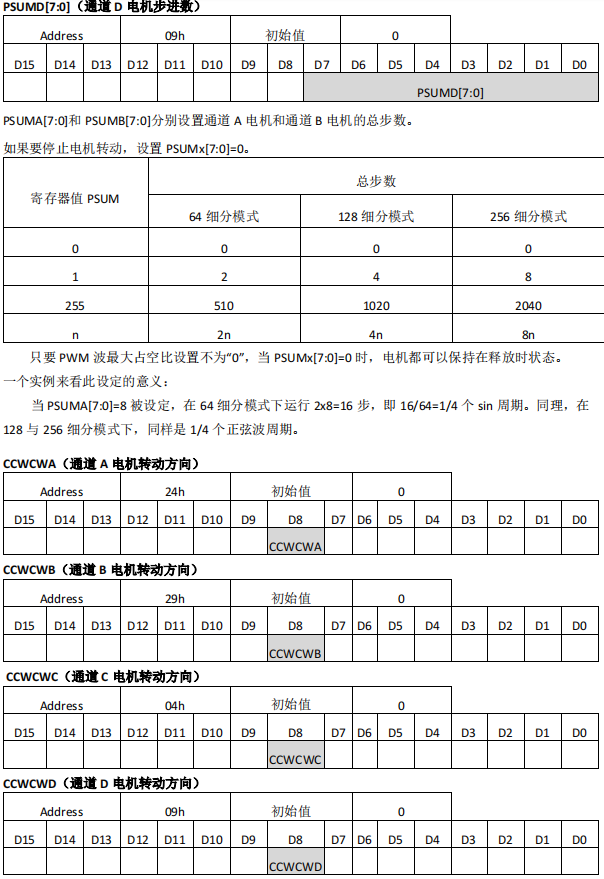
PSUMA[7:0](步進電機步進數,地址 24h)
1 個 VFx 的時間間隔內的電機的轉動次數設置。
每次 VFx 脈沖輸入時,電機轉動所設置的次數。因此,設置次數為“0”是可以停止電機的轉動。當
設置的轉動次數總額超過了 1 個 VFx 脈沖的時間,超出部分會被取消。
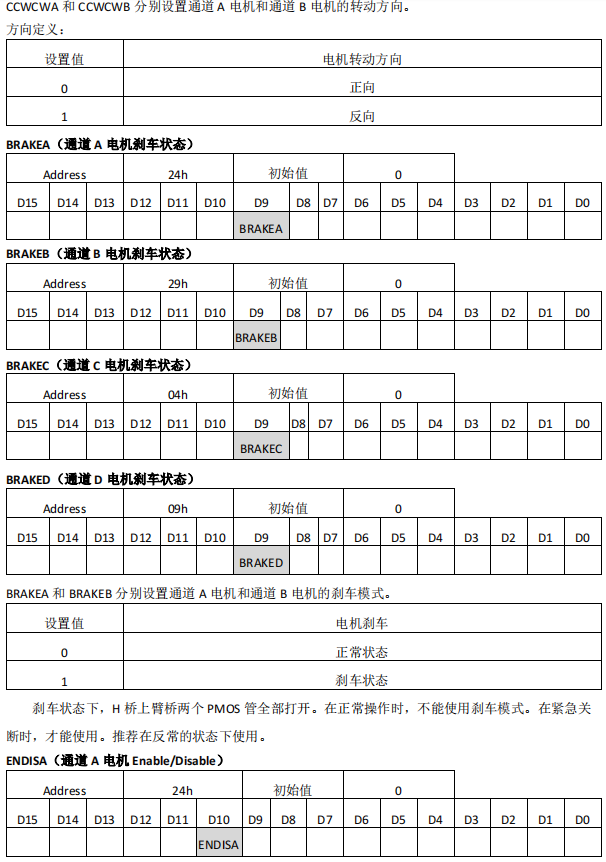
CCWCWA(轉動方向,地址 24h)
電機轉動方向設置,只要在選擇轉動方向前設置即可。
BRAKEA(電機剎車設置,地址 24h)
剎車時設置電流為 0。由于執行此設置時,很難得到電機的最終位置,所以此設置一般用于立即
停止電機。
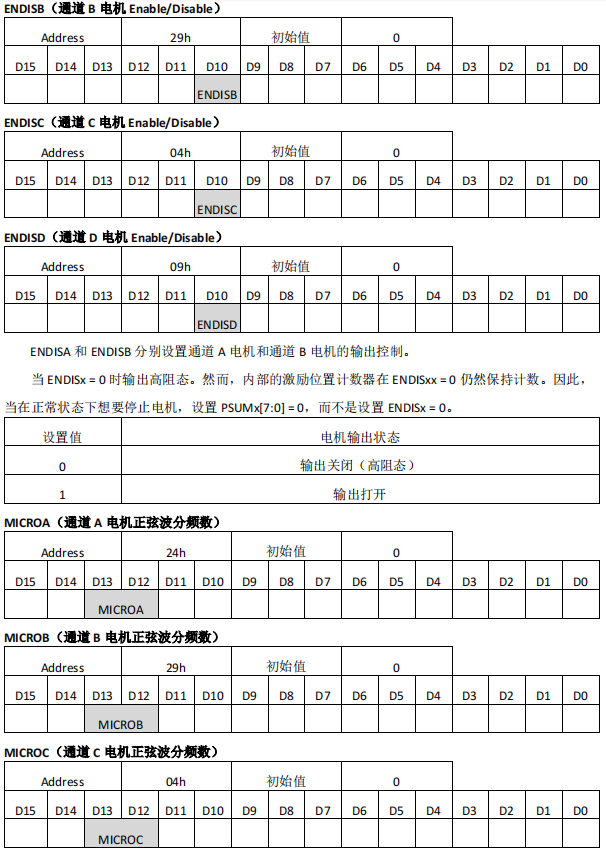
ENDISA(電機工作 Enable/Disable,地址 24h)
設置電機工作使能。當設置為不使能時,電機引腳輸出高阻態,電機正在轉動時不要設置成
disable。
MICROA[1:0](正弦波分頻數,地址 24h)
設置正弦波的分頻數。這個設置不改變轉動次數和轉動速度。只有當轉速達不到要求時,才需要
設置此項。復位后(48 引腳 RSTB:低→高),設置有效。
INTCTA[15:0](脈沖周期,地址 25h)
脈沖周期設置。轉動速度決定于這個設置。
3.3 步進電機微步進驅動時,如何調整寄存器值
在每個同步信號 VF,步進電機控制需要設置電機轉動次數和轉動速度。相關設置的轉動次數和速
度的寄存器為:
INTCTx[15:0]:設置每一步的時間(相應的,即轉動速度)
PSUMx[7:0]:每個 VF 時段內轉動總步數
當在連續的 VF 時段內持續驅動電機,需要設置持續轉動時間以適應 VF 周期。
以下是電機轉動時計算 INTCTx[15:0]和 PSUMx[7:0]的方法
1) 計算 INTCTx[15:0](決定電機轉動速度)
INTCTx[15:0] × 768 = OSCIN 頻率 / 轉動頻率
2) 由 INCTx[15:0]計算 PSUMx[7:0]。不能只看 PSUMx[7:0]的值。
下面的等式成立時,持續轉動時間和 VF 時間相同,電機實現均勻轉動
INTCTx[15:0] × PSUMx[7:0] × 24 = OSCIN 頻率 / VF 頻率
3) PSUMx[7:0]設置完成后,由上式重新計算 INTCTx[15:0]
舉例說明 OSCIN 頻率 = 27 MHz,VF 頻率 = 60Hz
計算 PSUMx[7:0]和 INTCTx[15:0],使電機在 800pps(1-2 相位)轉動,每步兩拍,轉化為相電
流,正弦波頻率 800pps = 100Hz,所以
INTCTx[15:0] = 27MHz / (100Hz × 768) =352
相應的
PSUMx[7:0] = 1/(60Hz)×27MHz/ (352 ×24) = 53
重新計算 INTCTxx[15:0]得:
INTCTx[15:0] = 1/(60Hz)×27MHz/ (53 ×24) = 354
如果上述 2)中等式左邊比右側小,轉動時間比 VF 時段小會引起不連續的轉動。反之,超過 VF
時段的轉動會被取消。
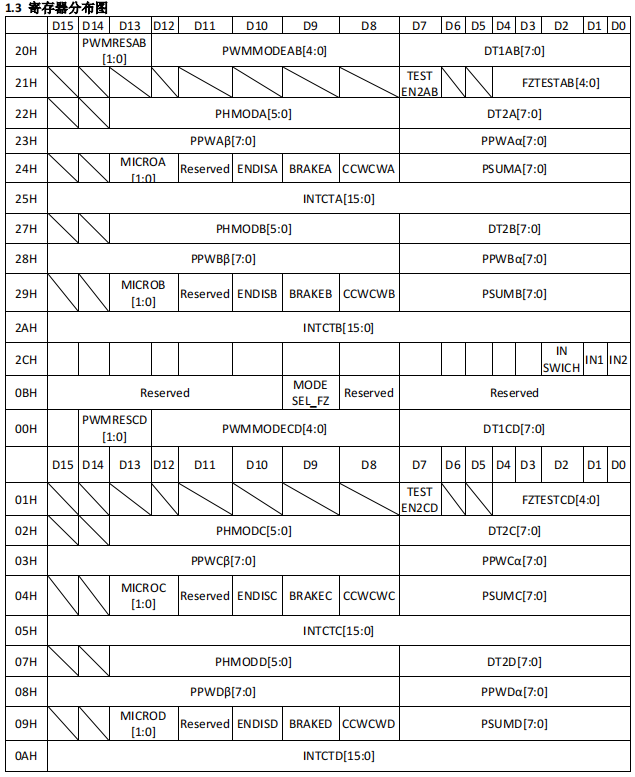
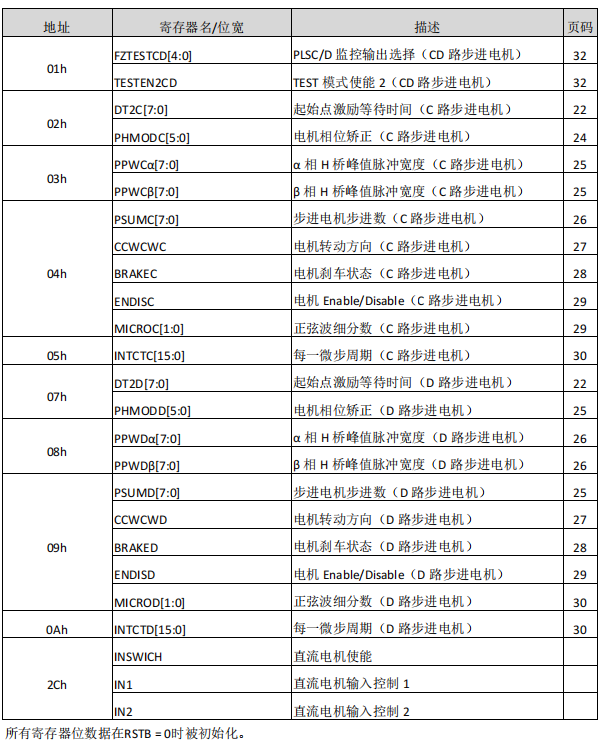
3.4 寄存器細節描述
注:(1) 通道 AB 與 CD 是設置是一樣的,只是寄存器的地址分別是 0Xh 與 2Xh 的區別,CD 通道
不做重復描述,如 DT1AB 做了描述,DT1CD 沒有描述。
(2)通道 A 與通道 B 為鏡像通道,同名寄存器如 PPWAα 與 PPWBα,DT2A 與 DT2B 設置方法也一
致,也不做重復描述。
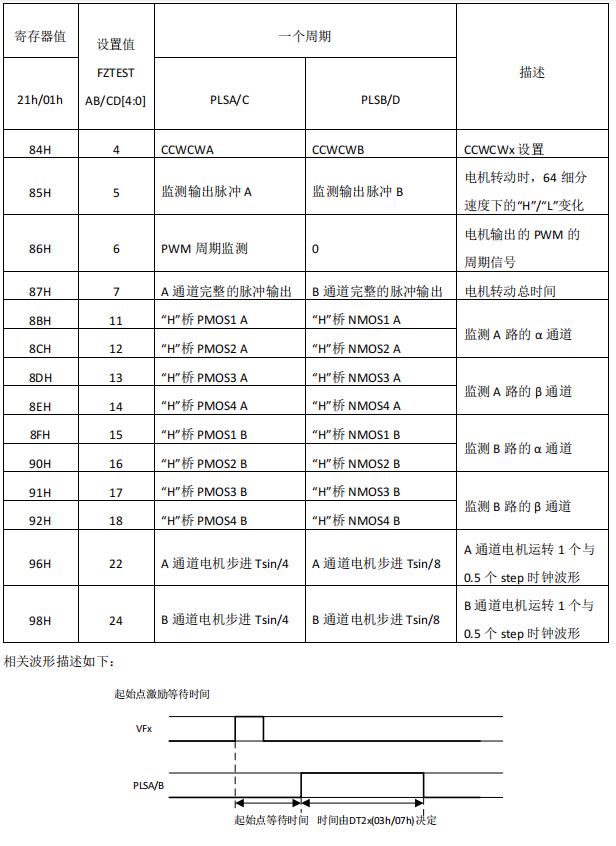
DT1AB[7:0](A 與 B 通道電機起始點等待時間)


DT1AB[7:0]設置數據寫入系統的延時時間(起始點等待時間)
電機可以精確地在起始點等待時間從“1”到“0”翻轉后被激活。起始點等待時間從視頻同步信號
(VFx)的上升沿開始計算。
由于起始點延時時間是主要是用來等待串行數據的寫入。應該設置寄存器值大于“0”,如果是“0”
的話,相應的數據不能更新。
參考第 18 頁 VF 和起始點等待時間的關系。
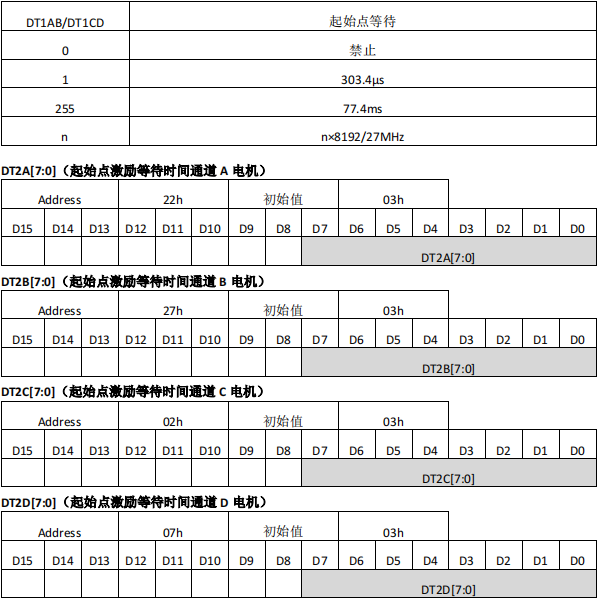
DT2A[7:0]和 DT2B[7:0]設置通道 A 電機和通道 B 電機開始轉動前的等待延遲時間。
在起始點激勵等待時間從“1”到“0”翻轉后,電機開始轉動。起始點激勵等待時間是在起始點等待
時間結束時刻開始計算。
這個信號是 A,B 通道的單獨延遲。應該設置寄存器值大于“0”,如果是“0”的話,相應的數據不能
更新。
參考第 18 頁 VF 和起始點激勵等待時間的關系。
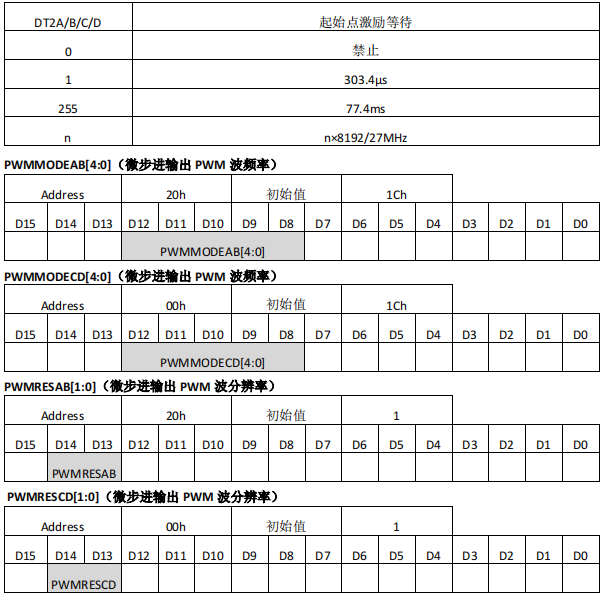
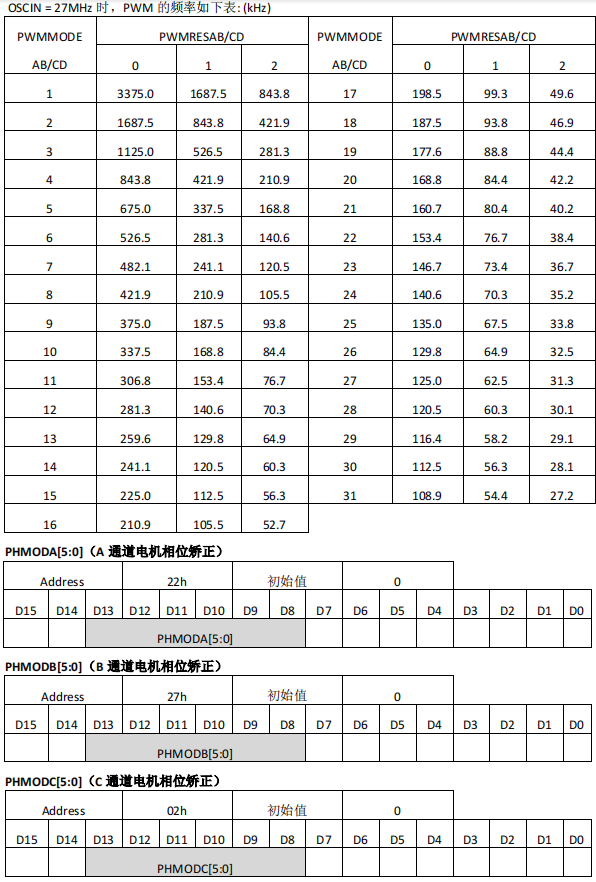
PWMMODEAB[4:0]通過設置系統時鐘 OSCIN 的分頻數來設置微步進輸出 PWM 的頻率。
PWMMODEAB[4:0]能在 1?31 的范圍內設置,PWM 波的頻率在 PWMMODE = 0 和 PWMMODE = 1
時候的取值是一樣的。
PWMRESAB[1:0]與 PWMMODEAB[4:0]一起決定 PWM 頻率。
PWM 頻率由下面的式子進行計算
PWM 頻率 = OSCIN 頻率 / ((PWMMODE × 23 ) × 2PWMRES)
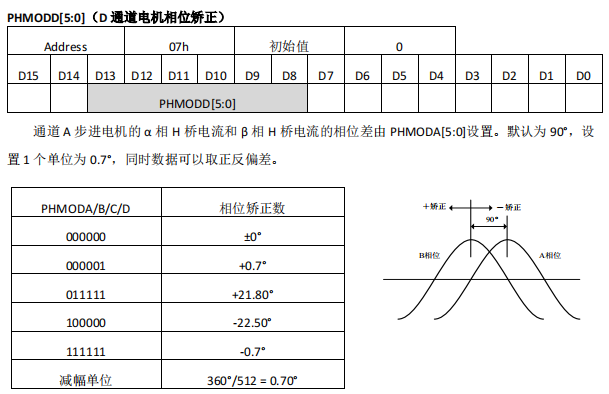
步進電機兩相線圈之間的相位差一般為 90°。但是,因為電機的不同或者工藝偏差,相位差也會
偏移出 90°。因此,即使驅動波形電流的相位差 90°,但是電機本身不是相差 90°,也會產生轉矩紋
波,噪聲還是存在的。
這個設置主要是減少由于電機變化時產生的轉矩紋波。
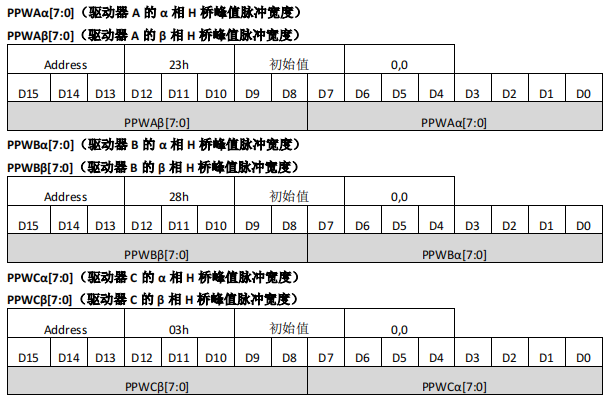
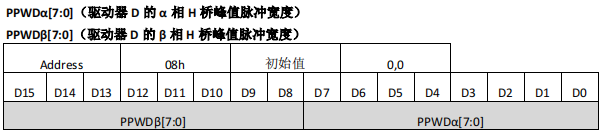
PPWAx[7:0]到 PPWDx[7:0]設置 PWM 波的最大占空比,決定驅動器 A 到 D 兩相輸出電流峰值的位置。
最大占空比由下式進行計算:
驅動器 X 最大占空比 = PPWxx/ (PWMMODExx × 8)
當 PPWxx = 0,線圈電流為 0。
舉例,當 PPWAx[7:0] = 200,PWMMODEAB[4:0] = 28,最大占空比為:
200 / (28 × 8) = 0.89
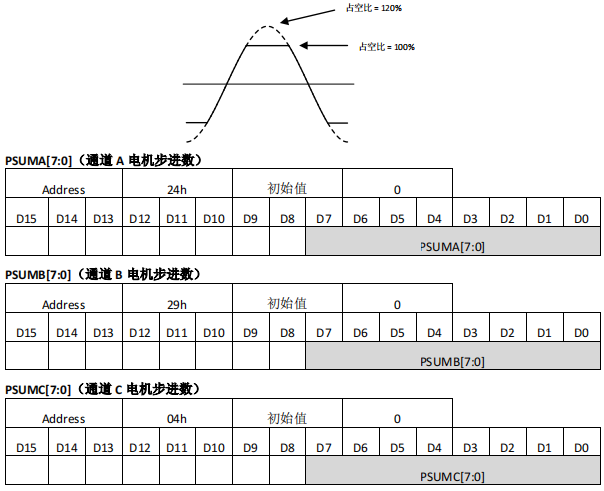
根據 PWMMODExx 和 PPWxx 的值,最大占空比可能超過 100%,
實際中,PWM 中占空比當然不可能超過 100% ,正弦波峰值點會被削去如下圖所示:
舉例說明,當 PWMMODExx = 10,PPWxx = 96,
最大占空比 = 90/(10 × 8) = 120%
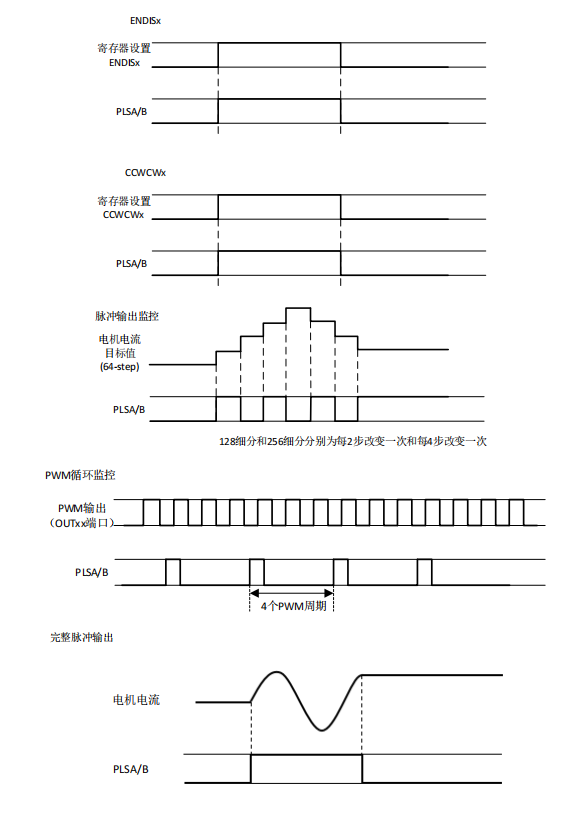
目標電流的波形如下顯示:
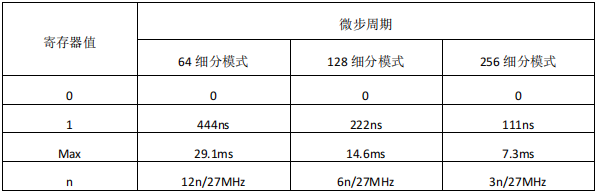
當 INTCTA[15:0]=0,只要 PWM 最大占空比不為 0,電機就保持在釋放時狀態。
舉例說明:當 INTCTA[15:0]=400 時,64 細分下每步周期:
12×400/27MHz=0.178ms
因此,每個正弦波周期為 0.178x64=11.4ms (87.9Hz);同樣計算,128 細分與 256 細分下也為 11.4ms。
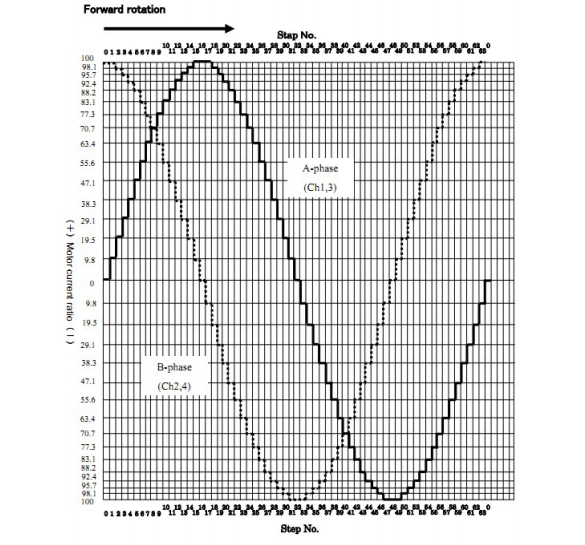
步進電機驅動(64 細分微步進電流曲線)
6. 直流電機 E 驅動電路
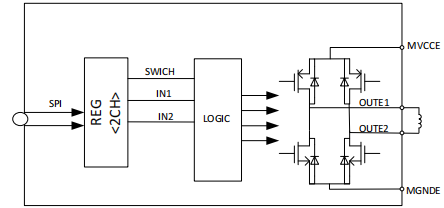
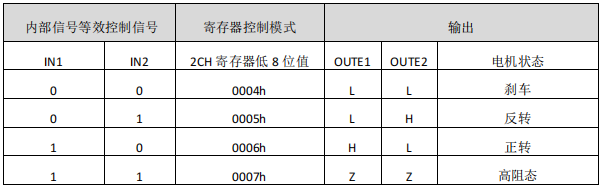
直流電機(攝像機中用于 IR-CUT)驅動采用 SPI 輸入控制方式,通過寫寄存器 2CH 來控制 H 橋的輸出:
SWICH 寄存器:寄存器 REG_2CH<2> bit2,上電默認為‘0’’
IN1 寄存器:寄存器 REG_2CH<1>bit1,上電默認為‘0’
IN2 寄存器:寄存器 REG_2CH<0>bit0 ,上電默認為‘0’
輸入輸出真值表如下:
直流電機 SPI 模式下的延遲時間
由于 SPI 串行輸入寫寄存器,每次寫 22 個數據,還有 3 個控制位,所以從寫寄存器 2CH,到控制
時間真正起作用的傳輸延遲約為 Tsclk×25,如寫數據串行時鐘采用 0.5MHz,則數字延遲時間為
25×1/0.5M=50μs ,此時 H 橋最大輸出頻率 10kHz。
典型應用電路圖
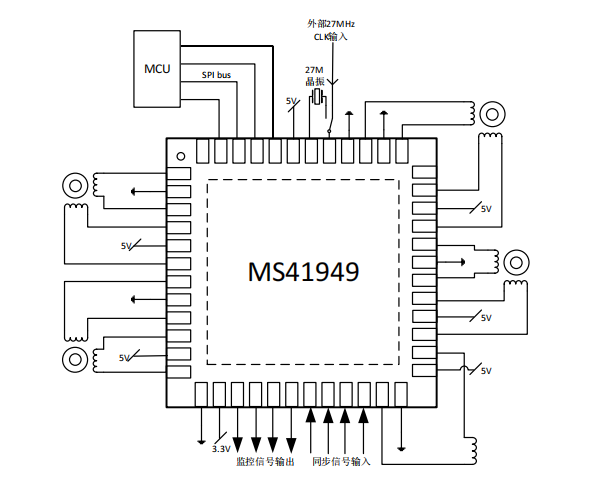
1. MS41949 具有背部散熱片 PAD,大功率應用時必須接地。
2. 在 OSCIN 管腳(PIN41)與 OSCOUT(PIN42)之間,內置放大電路與 SMIT 電路,所以 OSCIN 與 OSCOUT 之
間可以使用低成本的無源晶振;也可以在 OSCIN 管腳接有源晶振的輸出(OSCOUT 懸空),或者其他
MCU 的 CLK 輸出,直流輸入與交流輸入幅度要求有差異。
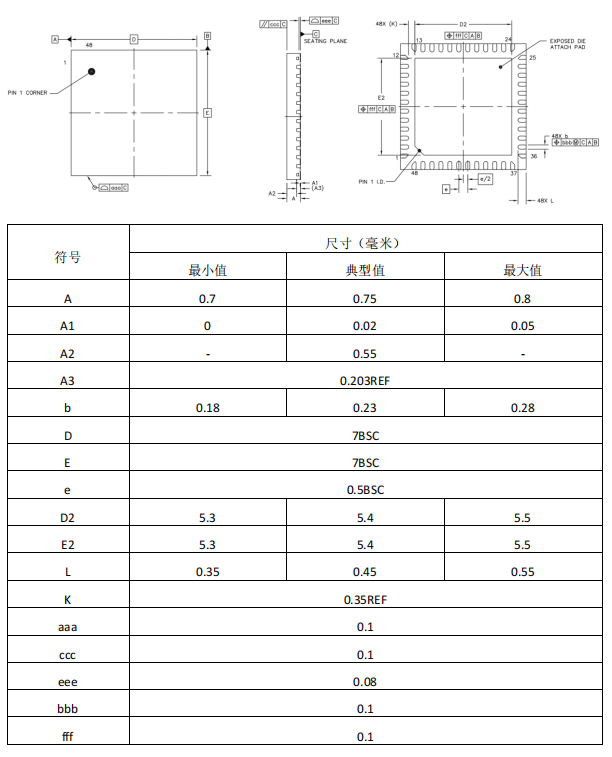
封裝外形圖
QFN48 (07X07)(背部帶散熱片)
——愛研究芯片的小王
審核編輯 黃宇
-
驅動
+關注
關注
12文章
1825瀏覽量
85177 -
超低噪聲
+關注
關注
0文章
31瀏覽量
8397 -
微步進電機
+關注
關注
0文章
4瀏覽量
964
發布評論請先 登錄
相關推薦
MS35229N——12V、256 細分靜音步進電機驅動器

MS5185T——三通道、低噪聲、低功耗 20 位∑-Δ ADC


具有集成式低輻射低噪聲直流/直流轉換器的ISOW774x四通道數字隔離器數據表






 工商網監
工商網監
評論