") 深入解析自動(dòng)駕駛系統(tǒng)中的DCU、MCU、MPU、SoC及整車電子架構(gòu)
深入解析自動(dòng)駕駛系統(tǒng)中的DCU、MCU、MPU、SoC及整車電子架構(gòu)
摘要
本文探討了自動(dòng)駕駛中的DCU、MCU和MPU在電子電氣架構(gòu)中的作用,比較了分布式與集中式架構(gòu)的優(yōu)勢(shì),以及ADAS系統(tǒng)從L0-L2+的發(fā)展歷程。著重分析了MCU和MPU的區(qū)別,以及它們?cè)谄囍悄芑途W(wǎng)聯(lián)化趨勢(shì)下的關(guān)鍵角色。
自動(dòng)駕駛中的DCU、MCU、MPU
1.分布式電子電氣架構(gòu)
2.域集中電子電氣架構(gòu)架構(gòu)
2.1通用硬件定義
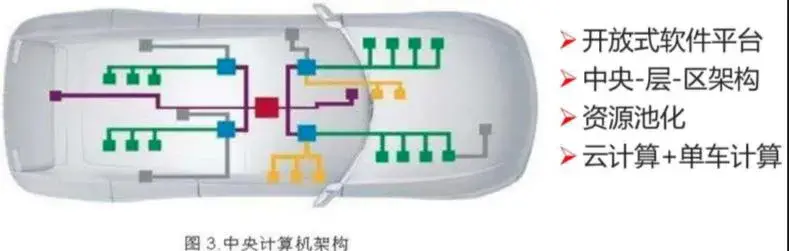
3.車輛集中電子電氣架構(gòu)
4.ADAS/AD系統(tǒng)方案演變進(jìn)程梳理
4.1L0-L2級(jí)別的ADAS方案
4.2L2+以上級(jí)別的ADAS方案
5.MCU和MPU區(qū)別
5.1MCU和MPU的區(qū)別
5.2CPU與SoC的區(qū)別
5.3舉個(gè)例子Reference:
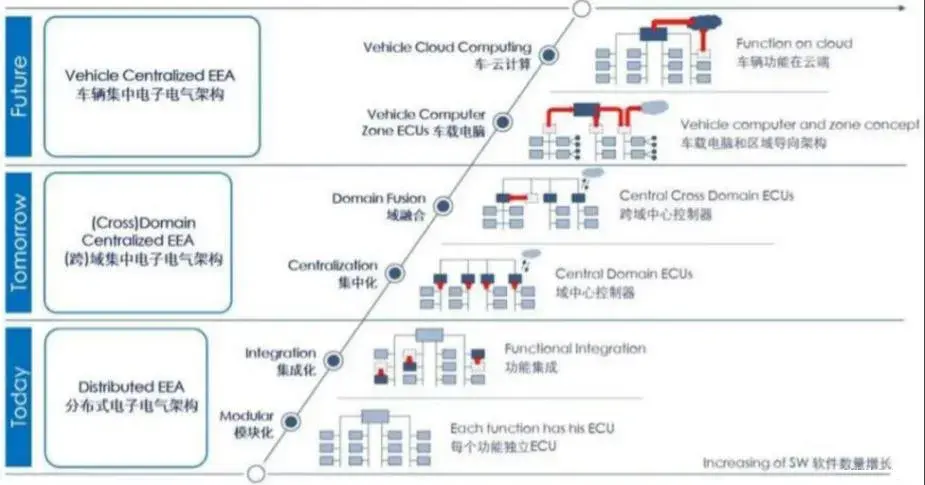
什么是域控制器(DCU),對(duì)汽車未來電子架構(gòu)有什么影響?自動(dòng)駕駛域控制器MPU和MCU的區(qū)別DCU:Domain Controller Unit,域控制器MCU:Micro Controller Unit,微控制單元MPU:Micro Processor Unit,微處理單元近年來,SDV(Software Define Vehicles,即軟件定義汽車)概念逐步被整車廠認(rèn)知,根源在于“汽車如何體現(xiàn)差異化”問題的變遷,隨著電動(dòng)化帶來的汽車電子構(gòu)架革新,汽車硬件體系將逐漸趨于一致,如何構(gòu)建通用化硬件,成為實(shí)現(xiàn)軟件軟件定義汽車的前提基礎(chǔ)。只有把硬件通用化,差異化減少,才能減少對(duì)軟件適配的成本,做到真正的軟件定義汽車。下圖為博世2017年在一汽車會(huì)議上分享的其在整車電子電氣架構(gòu)方面戰(zhàn)略圖。整車電子電氣架構(gòu)發(fā)展分為了六個(gè)階段:模塊化階段->功能集成階段->中央域控制器階段->跨域融合階段->車載中央電腦和區(qū)域控制器->車載云計(jì)算階段。
1.分布式電子電氣架構(gòu)
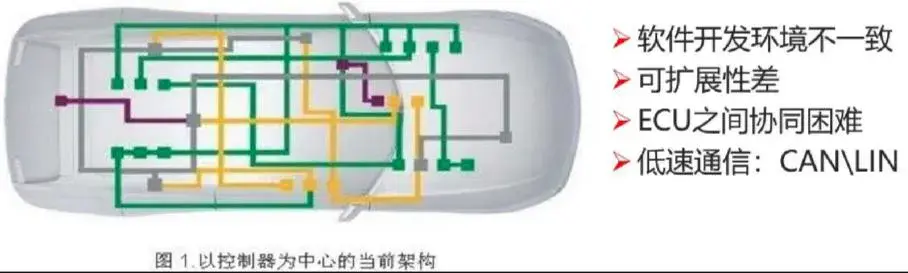
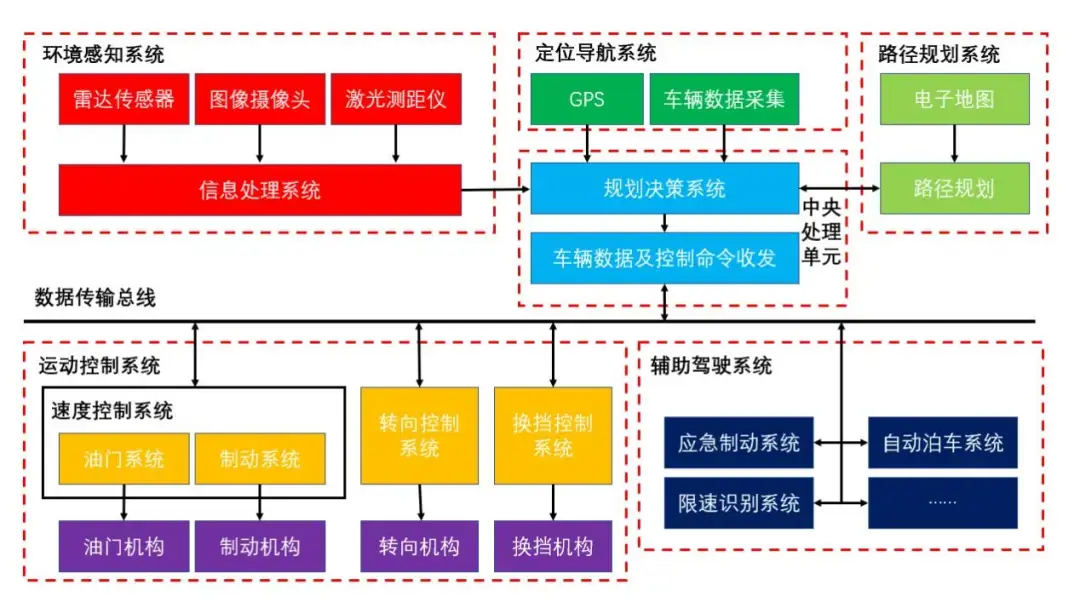
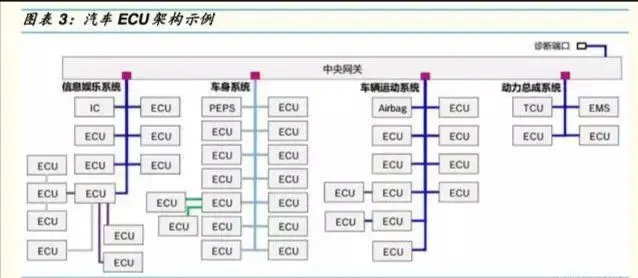
過去十多年的汽車智能化和信息化發(fā)展產(chǎn)生了一個(gè)顯著結(jié)果就是ECU芯片使用量越來越多。從傳統(tǒng)的引擎控制系統(tǒng)、安全氣囊、防抱死系統(tǒng)、電動(dòng)助力轉(zhuǎn)向、車身電子穩(wěn)定系統(tǒng);再到智能儀表、娛樂影音系統(tǒng)、輔助駕駛系統(tǒng);還有電動(dòng)汽車上的電驅(qū)控制、電池管理系統(tǒng)、車載充電系統(tǒng),以及蓬勃發(fā)展的車載網(wǎng)關(guān)、T-BOX和自動(dòng)駕駛系統(tǒng)等等。傳統(tǒng)的汽車電子電氣架構(gòu)都是分布式的,汽車?yán)锏母鱾€(gè)ECU都是通過CAN和LIN總線連接在一起,現(xiàn)代汽車?yán)锏腅CU總數(shù)已經(jīng)迅速增加到了幾十個(gè)甚至上百個(gè)之多,整個(gè)系統(tǒng)復(fù)雜度越來越大,幾近上限。在今天軟件定義汽車和汽車智能化、網(wǎng)聯(lián)化的發(fā)展趨勢(shì)下,這種基于ECU的分布式EEA也日益暴露諸多問題和挑戰(zhàn)。
2.域集中電子電氣架構(gòu)
為了解決分布式EEA的這些問題,人們開始逐漸把很多功能相似、分離的ECU功能集成整合到一個(gè)比ECU性能更強(qiáng)的處理器硬件平臺(tái)上,這就是汽車 域控制器。域控制器的出現(xiàn)是汽車EE架構(gòu)從ECU分布式EE架構(gòu)演進(jìn)到域集中式EE架構(gòu)的一個(gè)重要標(biāo)志。
為了解決分布式EEA的這些問題,人們開始逐漸把很多功能相似、分離的ECU功能集成整合到一個(gè)比ECU性能更強(qiáng)的處理器硬件平臺(tái)上,這就是汽車 域控制器。域控制器的出現(xiàn)是汽車EE架構(gòu)從ECU分布式EE架構(gòu)演進(jìn)到域集中式EE架構(gòu)的一個(gè)重要標(biāo)志。
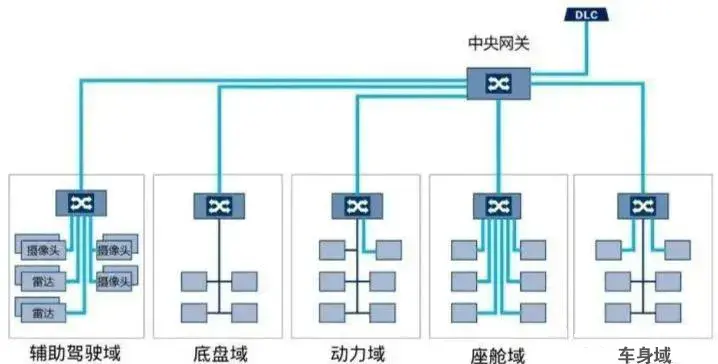
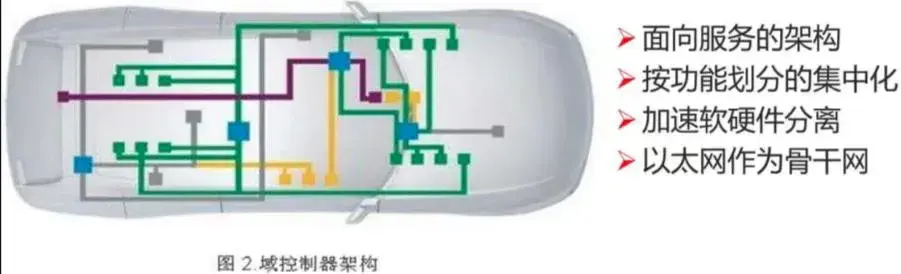
域控制器是汽車每一個(gè)功能域的核心,它主要由域主控處理器、操作系統(tǒng)和應(yīng)用軟件及算法三部分組成。平臺(tái)化、高集成度、高性能和良好的兼容性是域控制器的主要核心設(shè)計(jì)思想。依托高性能的域主控處理器、豐富的硬件接口資源以及強(qiáng)大的軟件功能特性,域控制器能將原本需要很多顆ECU實(shí)現(xiàn)的核心功能集成到一起來,極大提高系統(tǒng)功能集成度,再加上數(shù)據(jù)交互的標(biāo)準(zhǔn)化接口,因此能極大降低這部分的開發(fā)和制造成本。對(duì)于功能域的具體劃分,各汽車主機(jī)廠家會(huì)根據(jù)自身的設(shè)計(jì)理念差異而劃分成幾個(gè)不同的域。比如博世劃分為5個(gè)域:動(dòng)力域(Power Train,安全)、底盤域(Chassis,車輛運(yùn)動(dòng))、車身域(Body,車身電子)、座艙域/智能信息域(Cockpit/Infotainment,娛樂信息)、自動(dòng)駕駛域(ADAS,輔助駕駛)。
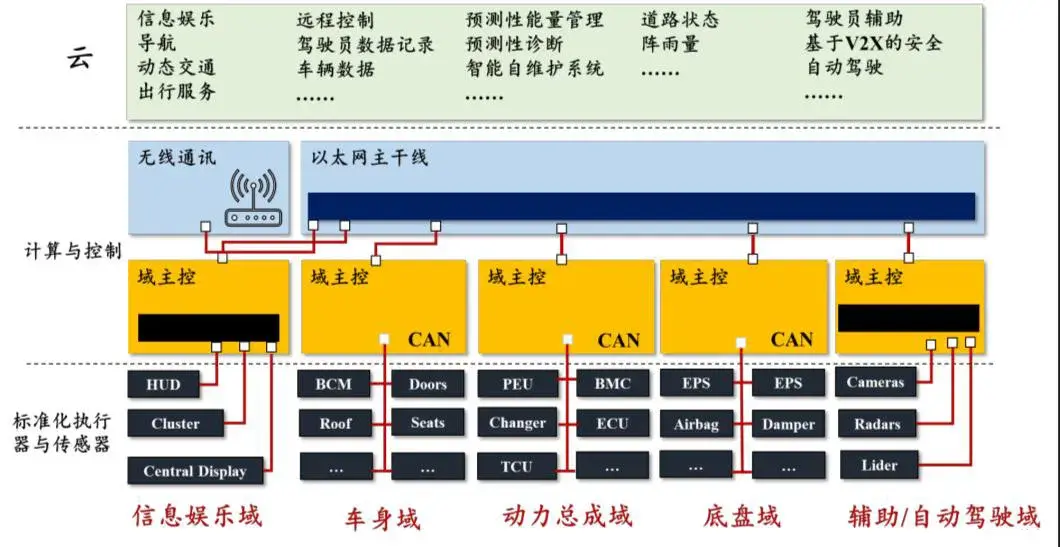
各個(gè)域內(nèi)部的系統(tǒng)互聯(lián)使用現(xiàn)如今常用的CAN和 FlexRay通信總線。而不同域之間的通訊,則由更高傳輸性能的以太網(wǎng)作為主干網(wǎng)絡(luò)承擔(dān)信息交換任務(wù)。在每個(gè)功能域中,域控制器處于絕對(duì)位置,需要強(qiáng)大的處理功率和超高的實(shí)時(shí)性能以及大量的通信外設(shè)來支持對(duì)應(yīng)域的功能實(shí)現(xiàn)。域控制器為構(gòu)建新一代的通用、高算力、高帶寬、高安全、可重構(gòu)的汽車電子電氣架構(gòu),智能電動(dòng)汽車的技術(shù)和產(chǎn)業(yè)發(fā)展提供堅(jiān)實(shí)基礎(chǔ)。2.1通用硬件定義域控制器的通用型要求:相關(guān)功能集中,集成MPU/MCU,滿足域內(nèi)功能運(yùn)算能力要求及功能安全要求;集成標(biāo)準(zhǔn)化軟件接口,如AUTOSAR;帶通訊接口,可與整車主網(wǎng)絡(luò)直連,同時(shí)與域內(nèi)執(zhí)行器或傳感器通過二級(jí)通訊總線進(jìn)行交互,總線類型:車載以太網(wǎng)(TSN)、CAN、LIN、FlexRay…目前,主流車企、零部件企業(yè)產(chǎn)品均按照動(dòng)力、底盤、車身、座艙、自動(dòng)駕駛五大域控制器推進(jìn)研發(fā)和商業(yè)化落地。
各分開域控制器介紹可見文章:什么是域控制器(DCU),對(duì)汽車未來電子架構(gòu)有什么影響?
3.車輛集中電子電氣架構(gòu)
4.ADAS/AD系統(tǒng)方案演變進(jìn)程梳理
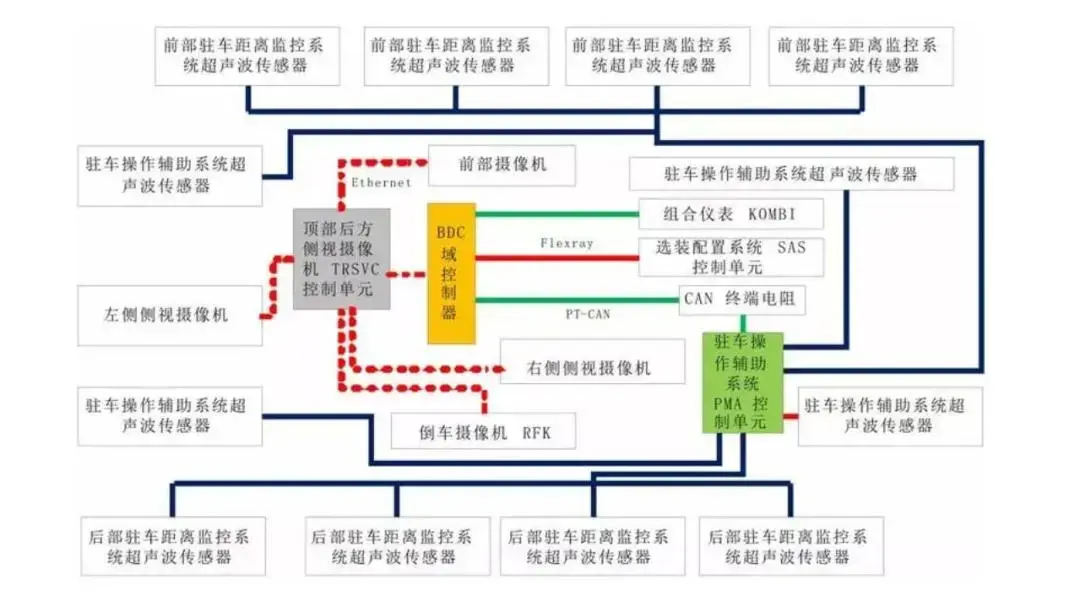
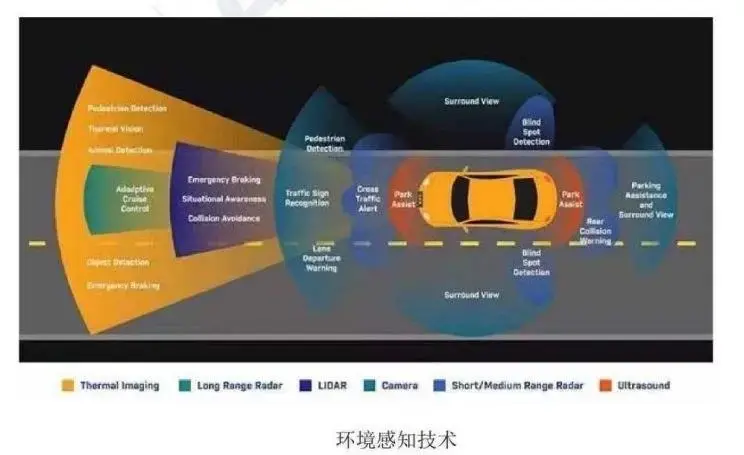
4.1L0-L2級(jí)別的ADAS方案早期大多數(shù)L0-L2級(jí)別的ADAS系統(tǒng)都是基于分布式控制器架構(gòu),整個(gè)ADAS系統(tǒng)由4-5個(gè)ADAS子系統(tǒng)組成,每個(gè)子系統(tǒng)通常是個(gè)一體機(jī)整體方案(可以被看作是一個(gè)smart sensor),子系統(tǒng)獨(dú)占所配置的傳感器,通常相互之間是獨(dú)立的。以智能前視攝像頭模塊(Intelligent Front Camera Module,F(xiàn)CM)為例,整個(gè)子系統(tǒng)ECU主板上包含2顆芯片:一顆是安全核(Safety Core);另一個(gè)顆是性能核(Performance Core)。安全核一般由英飛凌TC297/397之類的MCU充當(dāng),承載控制任務(wù),因此需要較高的功能安全等級(jí)需求;性能核通常是具有更高性能算力的多核異構(gòu)MPU,會(huì)承載大量的計(jì)算任務(wù)。下面是一個(gè)對(duì)L0-L2級(jí)別方案的總結(jié):L0級(jí)別方案:實(shí)現(xiàn)各種ADAS報(bào)警功能,比如:FCW、LDW、BSW、LCA等。分布式架構(gòu),通常由FCM、FCR、SRRs、AVS、APA等幾大硬件模塊組成。L1級(jí)別方案:完成各種ADAS單縱向核單橫向控制功能,比如:ACC、AEB、LKA等。也是分布式架構(gòu),硬件模塊組成與L0級(jí)別方案大致相同。L2級(jí)別方案:完成ADAS縱向+橫向組合控制功能。比如:基于FCM+FCR融合系統(tǒng),融合前向視覺感知和前雷達(dá)目標(biāo)感知信息,實(shí)現(xiàn)TJA/ICA等功能;或者基于AVS+APA的融合系統(tǒng),實(shí)現(xiàn)自動(dòng)泊車功能。4.2L2+以上級(jí)別的ADAS方案分布式架構(gòu)的ADAS系統(tǒng)存在兩個(gè)致命缺點(diǎn):各個(gè)子系統(tǒng)互相獨(dú)立,無(wú)法做多傳感器之間的深度融合。各子系統(tǒng)獨(dú)占所配置的傳感器,因此無(wú)法實(shí)現(xiàn)跨多個(gè)不同子系統(tǒng)傳感器的復(fù)雜功能。當(dāng)整車EE架構(gòu)演進(jìn)到域集中式EEA之后,ADAS域控制器中配置了集成度更高、算力性能更高的計(jì)算處理器平臺(tái),進(jìn)而可以支撐更復(fù)雜的傳感器數(shù)據(jù)融合算法,以實(shí)現(xiàn)更高級(jí)級(jí)別的ADAS功能,比如:HWP、AVP等。
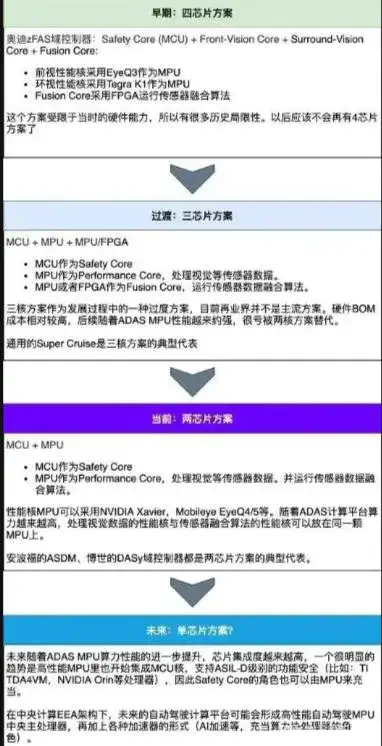
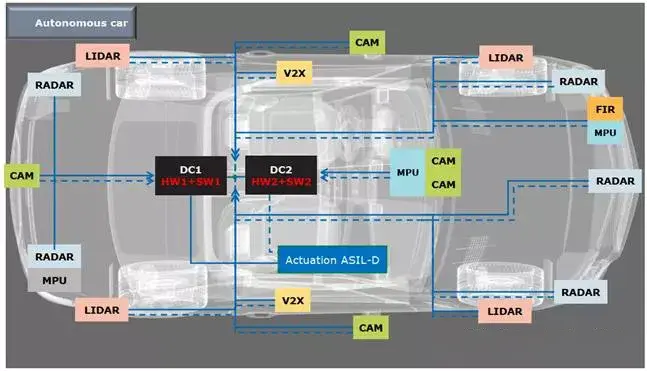
集中式ADAS域控制器方案從最早的四芯片方案,過渡到三芯片方案,再到當(dāng)前業(yè)界主流的兩芯片方案,如下圖所示:
5.MCU和MPU區(qū)別
MPU的全稱叫Micro Processor Unit,MCU的全稱是 Mirco Controller Unit。首先這兩個(gè)詞都有一個(gè)Micro開頭,其實(shí)這就表明了這是計(jì)算/控制單元小型化后出現(xiàn)的技術(shù)。事實(shí)上,這是由于集成電路進(jìn)步帶來的計(jì)算機(jī)系統(tǒng)集成程度提高的結(jié)果。使得原來有多片分立的元件組成的計(jì)算機(jī)系統(tǒng)向高度集成化發(fā)展,多個(gè)芯片/元件的功能在向一顆芯片集中。這是一個(gè)大的技術(shù)演進(jìn)的背景。核心區(qū)別其實(shí)就是Control和Process。但在技術(shù)演進(jìn)過程中,出現(xiàn)了兩種不同的需求。這兩種需求就是“以軟制硬”和“以硬助軟”兩種模式。所謂以軟制硬,就是通過運(yùn)行一段軟件/程序來控制硬件,也就是所謂的程控。在這種使用模式中,計(jì)算機(jī)系統(tǒng)不承擔(dān)主要的工作負(fù)載,而主要是起輔助/協(xié)調(diào)/控制作用。
因此這種情況下集成的化的計(jì)算機(jī)系統(tǒng)就不太需要強(qiáng)大的計(jì)算/處理能力。所以對(duì)應(yīng)的形態(tài)應(yīng)該是運(yùn)行頻率低、運(yùn)算能力一般,但是需要集成化程度高(使用方便)、價(jià)格低廉(輔助系統(tǒng)不應(yīng)增加太多成本)等因素。由于主要完成“控制”相關(guān)的任務(wù),所以被稱為Controller。也就是根據(jù)外界的信號(hào)(刺激),產(chǎn)生一些響應(yīng),做一點(diǎn)簡(jiǎn)單的人機(jī)界面。對(duì)于這種需求,通過不需要芯片主頻太高。早期8051系列主頻不過10幾MHz,還是12個(gè)周期執(zhí)行一條指令。經(jīng)過多年的“魔改”也最終達(dá)到了100MHz。其次就是處理能力不用太強(qiáng),8位的MCU長(zhǎng)期是微控制器的主流。后來16位的MCU逐步開始占領(lǐng)市場(chǎng)。而隨著ARM的32位MCU的出現(xiàn),采用ARM的M系列的MCU也開始逐步擴(kuò)大市場(chǎng)。以ST、NXP公司的產(chǎn)品為主要代表。但是這些ARM系列MCU的主頻一般也是在幾十MHz到100多MHz的量級(jí)。其次由于執(zhí)行的“控制相關(guān)”任務(wù),通常不需要支持復(fù)雜的圖形界面和處理能力。在MCU上完成的任務(wù)大多數(shù)是一些簡(jiǎn)單的刺激-響應(yīng)式的任務(wù),而且任務(wù)類型單一,任務(wù)執(zhí)行過程簡(jiǎn)單。在這種情況下一般不需要MCU去執(zhí)行功能復(fù)雜、運(yùn)算量大的程序,而通常不需要運(yùn)行大型操作系統(tǒng)來支持復(fù)雜的多任務(wù)管理。這就造成了MCU一般對(duì)于存儲(chǔ)器的容量要求比較低。
而Processor,顧名思義是處理器。處理器就是能夠執(zhí)行“處理”功能的器件。其實(shí)具備Processor這個(gè)單詞的器件不少。比如CPU就被稱為“中央處理器”,那既然有“中央”就應(yīng)該有“外圍”。GPU在經(jīng)典的桌面計(jì)算機(jī)中就是一個(gè)典型的“外圍”處理器,主要負(fù)責(zé)圖形圖像處理,由于圖形圖像顯示。當(dāng)然,今天由于AI的崛起,GPU變身成為了人工智能的訓(xùn)練神器。帶“P”的還有DSP,數(shù)字信號(hào)處理器,一種專門為了數(shù)字信號(hào)處理而生的“領(lǐng)域?qū)S锰幚砥鳌薄K赃@些帶P的處理器,都是要具備“處理”能力的。“處理”什么?自然是處理數(shù)據(jù)/信息了。也就是說處理器本身都需要較為強(qiáng)大的數(shù)據(jù)處理/計(jì)算能力。以GPU為例,正是由于它強(qiáng)大的并行浮點(diǎn)運(yùn)算能力才能支持高速的圖像處理,使音視頻播放、多媒體技術(shù)成為可能。同樣由于這樣的處理能力使之在AI時(shí)代來臨之時(shí)發(fā)揮巨大作用。以上對(duì)于處理器說了這么多,核心意思就是一個(gè)。處理器一定要處理/運(yùn)算能力強(qiáng),能夠執(zhí)行比較復(fù)雜的任務(wù)。而微處理器,其實(shí)就是微型化/集成化了的處理器。準(zhǔn)確的說是微型化/集成化的中央處理器(CPU)。這就是把傳統(tǒng)的CPU之外集成了原屬于“芯片組”的各類接口和部分“外設(shè)”而形成的。MPU從一開始就定位了具有相當(dāng)?shù)奶幚砗瓦\(yùn)算能力,一幫需要運(yùn)行較大型的操作系統(tǒng)來實(shí)現(xiàn)復(fù)雜的任務(wù)處理。因此這就決定了MPU應(yīng)該具備比較高的主頻,和較為強(qiáng)大的運(yùn)算能力。MPU很早就演進(jìn)到了32位處理器,現(xiàn)在更是開始大力普及64位。現(xiàn)在MPU領(lǐng)導(dǎo)具有絕對(duì)影響力的Arm公司一開始就定位要做32位。同時(shí)MPU也一直追求實(shí)現(xiàn)較高的主頻。早期經(jīng)典的Arm9系列MPU頻率就在200MHz-400MHz。現(xiàn)在手機(jī)上使用的高端MPU更是到達(dá)了3GHz,和主流的桌面處理器是一個(gè)級(jí)別了。和通用的桌面處理器一樣,MPU現(xiàn)在也普遍“多核化”。
為了支撐MPU強(qiáng)大的算力,使得“物盡其用”。必然要求在MPU上運(yùn)行比較復(fù)雜的、運(yùn)算量大的程序和任務(wù),通常需要有大容量的存儲(chǔ)器來配合支撐。而大容量的存儲(chǔ)器難以被集成到以邏輯功能為主的MPU內(nèi)部,因此MPU現(xiàn)在要運(yùn)行起來通常需要“外掛”大容量的存儲(chǔ)器。主要是大容量的DDR存儲(chǔ)器和FLASH。在手機(jī)領(lǐng)域前者被稱為“運(yùn)存”而后者被稱為“內(nèi)存”。為了支撐運(yùn)行復(fù)雜操作系統(tǒng)和大型程序,往往還需要MPU中集成高性能的存儲(chǔ)控制器、存儲(chǔ)管理單元(MMU))等一整套復(fù)雜的存儲(chǔ)機(jī)制和硬件。
所以從形態(tài)上看,MPU由于需要運(yùn)行對(duì)處理能力要求復(fù)雜大程序,一般都需要外掛存儲(chǔ)器才能運(yùn)行起來。而MCU往往只是執(zhí)行刺激-響應(yīng)式的過程控制和輔助,功能比較單一,僅僅需要使用片上集成的小存儲(chǔ)器即可。這是區(qū)別MPU和MCU的重要表象,但不是核心原因。總結(jié)一下,MPU和MCU的區(qū)別本質(zhì)上是因?yàn)閼?yīng)用定位不同,為了滿足不同的應(yīng)用場(chǎng)景而按不同方式優(yōu)化出來的兩類器件。MPU注重通過較為強(qiáng)大的運(yùn)算/處理能力,執(zhí)行復(fù)雜多樣的大型程序,通常需要外掛大容量的存儲(chǔ)器。而MCU通常運(yùn)行較為單一的任務(wù),執(zhí)行對(duì)于硬件設(shè)備的管理/控制功能。通常不需要很強(qiáng)的運(yùn)算/處理能力,因此也不需要有大容量的存儲(chǔ)器來支撐運(yùn)行大程序。通常以單片集成的方式在單個(gè)芯片內(nèi)部集成小容量的存儲(chǔ)器實(shí)現(xiàn)系統(tǒng)的“單片化”。但需要指出的是,隨著技術(shù)的不斷演進(jìn)。以上的產(chǎn)品形態(tài)也會(huì)發(fā)生一系列的變化和衍生。現(xiàn)在NXP已經(jīng)開始推出主頻在1GHz,帶強(qiáng)大運(yùn)算能力的MCU。而隨著3D封裝、Chiplet技術(shù)的進(jìn)步,把大容量存儲(chǔ)器以先進(jìn)封裝的方式實(shí)現(xiàn)“單片集成”也正在實(shí)現(xiàn)。所以這種技術(shù)名詞最終還是應(yīng)該從他們出現(xiàn)的原因去理解,而不應(yīng)該簡(jiǎn)單的從一些形態(tài)、架構(gòu)去解釋。更不應(yīng)該機(jī)械的搞一些沒有什么意義的“定義”,還讓學(xué)生在考試的時(shí)候去回答。
5.1MCU和MPU的區(qū)別MCU在一塊芯片中集成了整個(gè)計(jì)算機(jī)系統(tǒng),可以直接加簡(jiǎn)單的外圍器件(電阻,電容)就可以運(yùn)行代碼了。它本質(zhì)上仍是一個(gè)完整的單片機(jī),有處理器,有各種接口,所有的開發(fā)都是基于已經(jīng)存在的系統(tǒng)架構(gòu),應(yīng)用者要做的就是開發(fā)軟件程序和加外部設(shè)備。MPU如ARM的Cortex-A系列,直接放代碼是運(yùn)行不了的,因?yàn)樗举|(zhì)上只是增強(qiáng)版的CPU,必須添加相應(yīng)的RAM和ROM。5.2CPU與SoC的區(qū)別SoC可以認(rèn)為是將MCU集成化與MPU強(qiáng)處理力各優(yōu)點(diǎn)二合一,其中MCU是CPU集成了各類外設(shè),MPU是增強(qiáng)版的CPU。目前芯片的發(fā)展方向是從CPU到SoC,現(xiàn)在已經(jīng)沒有純粹的CPU了,都是SoC。
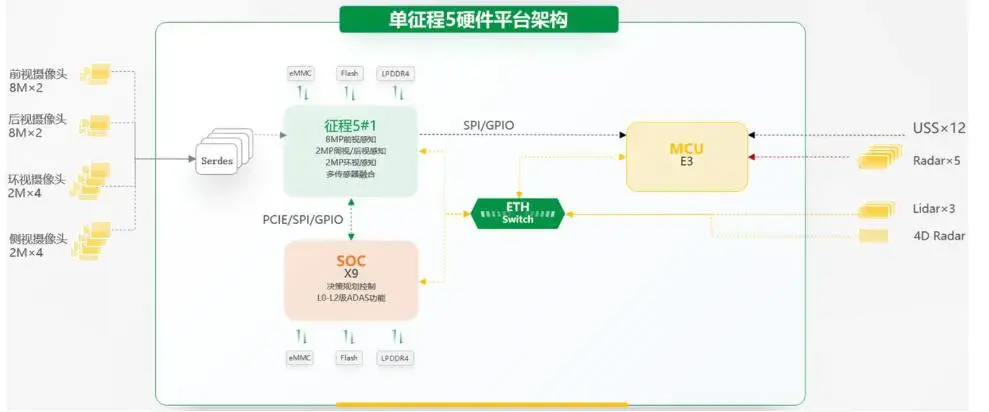
上圖基于J5的自動(dòng)駕駛域控制器可見,包含一個(gè)MCU 和J5+X9倆SoC,而J5包含了八核Arm Cortex-A55MPU。
-
mcu
+關(guān)注
關(guān)注
146文章
16984瀏覽量
350293 -
soc
+關(guān)注
關(guān)注
38文章
4118瀏覽量
217928 -
MPU
+關(guān)注
關(guān)注
0文章
346瀏覽量
48735 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
783文章
13682瀏覽量
166137 -
DCU
+關(guān)注
關(guān)注
0文章
11瀏覽量
2671
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
FPGA在自動(dòng)駕駛領(lǐng)域有哪些應(yīng)用?
FPGA在自動(dòng)駕駛領(lǐng)域有哪些優(yōu)勢(shì)?
自動(dòng)駕駛真的會(huì)來嗎?
自動(dòng)駕駛的到來
AI/自動(dòng)駕駛領(lǐng)域的巔峰會(huì)議—國(guó)際AI自動(dòng)駕駛高峰論壇
高級(jí)安全駕駛員輔助系統(tǒng)助力自動(dòng)駕駛
UWB主動(dòng)定位系統(tǒng)在自動(dòng)駕駛中的應(yīng)用實(shí)踐
如何讓自動(dòng)駕駛更加安全?
自動(dòng)駕駛汽車的處理能力怎么樣?
自動(dòng)駕駛車SoC開發(fā)有什么雷區(qū)?
自動(dòng)駕駛OS市場(chǎng)的現(xiàn)狀及未來 精選資料推薦
自動(dòng)駕駛系統(tǒng)設(shè)計(jì)及應(yīng)用的相關(guān)資料分享
自動(dòng)駕駛技術(shù)的實(shí)現(xiàn)
自動(dòng)駕駛線控底盤VCU功能介紹
自動(dòng)駕駛基礎(chǔ)架構(gòu)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論