 一種新型機翼應變載荷關系神經網絡模型
一種新型機翼應變載荷關系神經網絡模型
摘要
建立飛機結構應變載荷關系模型時,地面標定試驗數據保真度高、但工況范圍及數量受限,有限元仿真工況范圍覆蓋廣、但數據保真度低,導致單獨依據地面標定試驗數據和有限元仿真數據建立的應變載荷關系模型難以兼顧適用范圍和預測精度。對此,本文提出了映射式與補償式兩種融合“試驗-仿真”虛實數據的多級神經網絡架構,開發了基于子學習器方差的模型認知程度度量方法,形成了精度高、適用性廣、能夠預警不可靠輸出結果的機翼應變載荷關系神經網絡模型,并采用縮比機翼對上述模型進行了驗證。本研究表明:虛實數據融合的神經網絡模型能夠更好地描述機翼的應變載荷關系,且補償式模型的預測效果優于映射式模型;本文提出的模型認知程度度量方法,能夠在不影響模型預測精度的前提下,有效判別出神經網絡模型認知程度差的數據樣本,對神經網絡的不可靠輸出做出預警。
關鍵詞
應變載荷關系;飛機結構;數據融合;神經網絡模型;子學習器
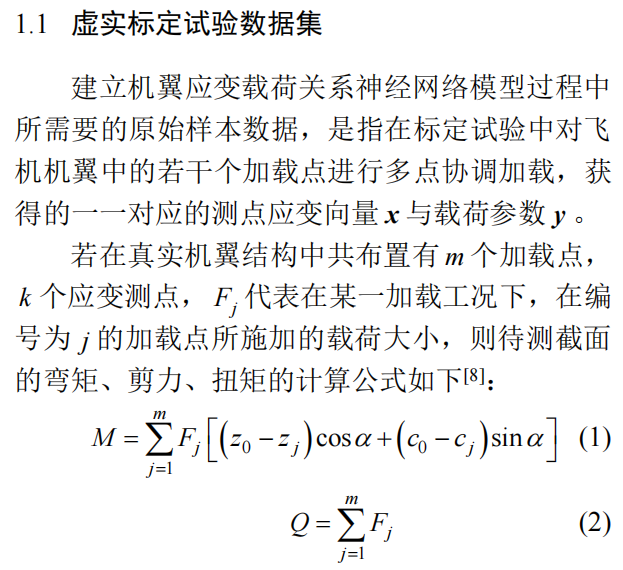
飛行實測是獲取飛機結構實際服役載荷歷程的最可靠途徑,對于飛機的定壽、延壽具有重要意義[1]。目前,獲得實測飛行載荷的主要方法是應變測量法[2],即:通過地面標定試驗,基于飛機結構真實響應,得到若干“載荷-應變”數據樣本,并建立應變載荷關系模型(傳統上一般為多元線性回歸方程組),并依據此模型和飛行實測應變推演飛行中的結構載荷[3-5]。可以看出,應變測量法的核心是獲取能夠充分反映飛機結構真實特性的應變載荷關系模型。然而,受試驗周期與成本的限制,地面標定試驗往往只能獲得有限的彎剪扭復合工況的數據樣本,導致應變載荷關系模型對復雜載荷下飛機結構特性的認識“不夠廣”[6];受試驗技術的限制,地面標定試驗的載荷水平無法覆蓋部分大機動、大過載飛行下的載荷水平,導致應變載荷關系模型對飛機結構實際特性的認識“不夠深”。因此,僅基于地面標定試驗樣本數據建立的應變載荷關系模型,存在適用范圍上的不足[8]。
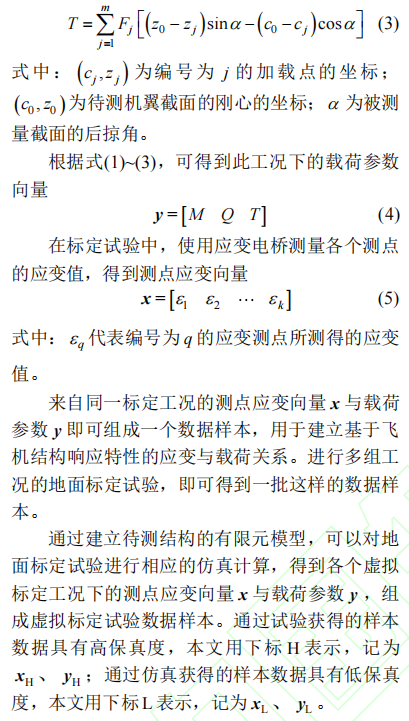
針對上述問題,不少研究提出,可通過有限元仿真開展“虛擬標定試驗”,從而在不顯著增加成本的情況下,拓展對飛機結構特性認識的廣度、深度[9]。楊全偉等[10]采用有限元方法模擬地面標定試驗,在減少地面標定試驗成本的同時獲取到了更充分的標定數據。然而,單純的虛擬標定試驗的仿真結果與真實試驗結果偏差大,依據試驗實測信息修正有限元模型也無法完全消除這一偏差,導致基于“虛擬標定試驗”建立的應變載荷關系模型的預測精度難以達到可接受的水平。例如:S.B.Cooper等[11]基于某飛機翼肋的實測應變數據,對翼肋的精細有限元模型進行了校準,但有限元仿真計算應變與實測應變的誤差仍可達到約5%。孟敏等[12]基于材料性能、結構幾何、應變計位置等相關參數,對某型飛機機翼的有限元模型進行了校準,提高了仿真模型的可信度,但載荷預測誤差最高可達到13.3%。因此,僅基于“虛擬標定試驗”樣本數據建立的應變載荷關系模型,雖然解決了適用范圍問題,但又引發了預測精度不足的問題。
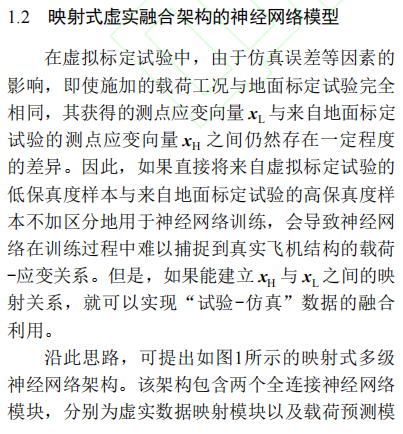
近年來,機器學習等技術迅猛發展,已經能夠從數據的表層關聯中挖掘出背后的深層規律,建立高精度的映射關系描述模型[13-15],并在此基礎上,揚長避短各取所長,將保真度高的試驗數據與覆蓋工況范圍廣的有限元仿真數據有機地融合,建立保真度高且適用工況范圍廣的神經網絡模型,能夠在一定程度上應對兼顧精度和適用范圍的映射關系描述問題[16,17]。但同時,相關研究也發現,對于神經網絡等機器學習模型,如果輸入樣本與訓練數據集偏離程度較大、甚至超出了神經網絡的知識邊界,神經網絡模型就會輸出“過度自信”的錯誤預測結果[18-21],給后續工作帶來隱患。因此,必須開展相應的方法研究,評估神經網絡模型對樣本的認知程度、甄別其不可靠的輸出結果。
對此,本文針對機翼應變載荷關系的高精度、寬范圍描述需求,基于“試驗-仿真”融合的解決思路,提出了映射式與補償式兩種神經網絡模型,建立了基于子學習器方差的模型認知程度度量方法,并在此基礎上,發展出了精度高、適用性廣、能夠預警不可靠輸出結果的機翼應變載荷關系神經網絡模型,并依據縮比機翼對模型效果進行了驗證。
01
機翼應變載荷關系的虛實融合神經網絡模型
地面標定試驗和有限元仿真獲取的都是“測點應變-截面載荷”樣本數據,但前者是少量的高保真度“實”數據,而后者是大量的低保真度“虛”數據。基于虛實數據融合的應變載荷關系神經網絡模型應當包括預測模塊和融合模塊兩個
部分,因此若按照兩個模塊之間的相互關系,則建立這一神經網絡模型存在兩條具體途徑——
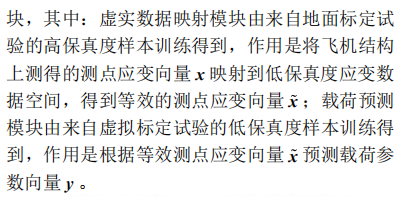
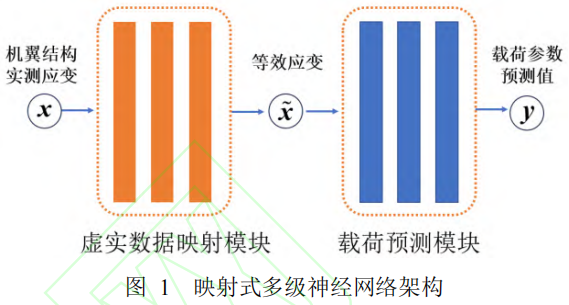
①先融合后預測。即,先將高保真度應變數據變換為低保真度應變數據空間中的等效應變,再將其輸入到基于限元仿真低保真度數據所建立的載荷預測模塊;此時,虛實數據融合的內涵實際上是將高保真度應變數據“映射”到低保真度應變數據空間中。
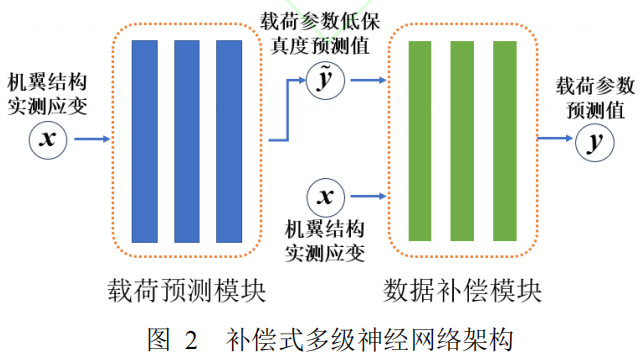
②先預測后融合。即,先由基于有限元仿真低保真度數據所建立的載荷預測模塊給出預測值,再通過基于地面標定試驗高保真度數據所訓練出的數據融合模塊對其進行校正;此時,虛實數據融合的內涵實際上是通過高保真度數據實現對低保真度載荷預測模塊的“補償”。
針對上述兩條途徑,本章首先對標定試驗所獲得的樣本數據進行介紹,然后分別提出映射式和補償式的多級神經網絡架構,并建立相應的應變載荷關系模型。
02
基于縮比機翼的模型驗證
本工作以某縮比機翼為對象,通過有限元仿真開展了虛擬標定試驗、通過增材制造鋁合金縮比機翼件開展了地面標定試驗,分別建立了數據集,用于訓練本文提出的映射式與補償式兩種虛實融合架構的神經網絡模型。此外,本文還訓練了僅使用虛擬標定試驗數據的非融合神經網絡、僅使用地面標定試驗數據的非融合神經網絡及同時使用兩種數據的非融合神經網絡,用于對比分析。
2.1縮比機翼虛實標定試驗數據集
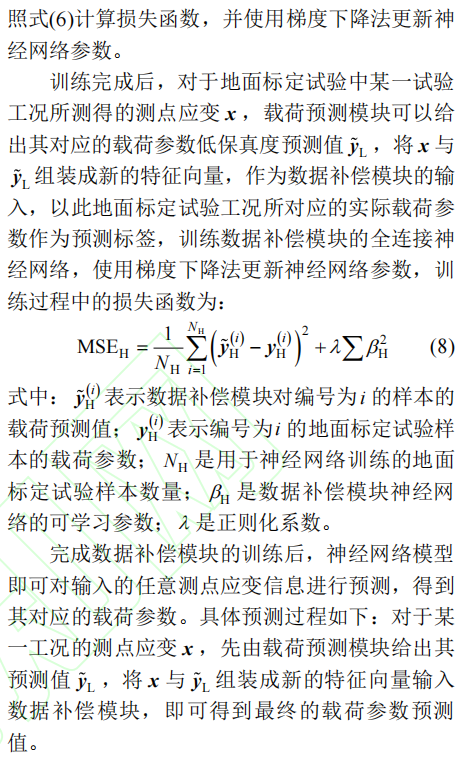
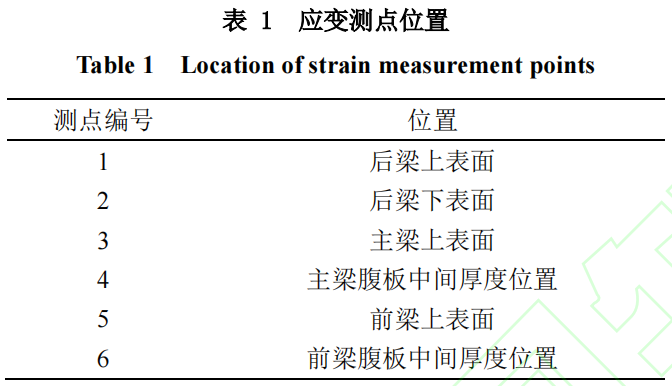
縮比機翼的翼展約35厘米,其有限元模型如圖3所示。機翼共布置了6個加載點,分別位于5肋、9肋、13肋與前梁、后梁的交界處;在翼根處共布置了6個應變測點,其具體位置見表1。
2.2模型訓練與結果分析
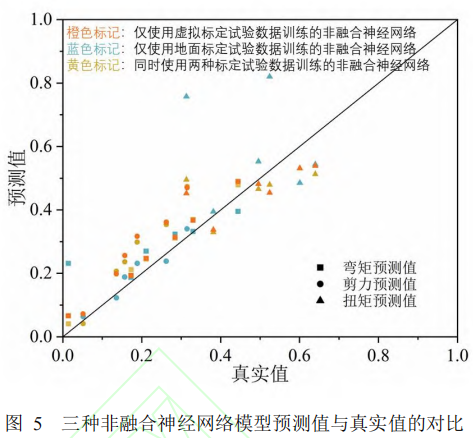
三種非融合神經網絡對于地面標定試驗數據集中各測試樣本的預測結果如圖5所示。可以看出,多數情況下,同時使用兩種標定試驗數據訓練的非融合神經網絡的預測值(黃色標記點)與僅使用虛擬標定試驗數據訓練的非融合神經網絡的預測值(橙色標記點)都較為接近,這是由于虛擬標定試驗的數據樣本量遠遠多于地面標定試驗,如果將這兩種數據樣本不加區分地同時用于神經網絡訓練,地面標定試驗樣本無法得到足夠的重視,神經網絡最終完全依賴于從虛擬標定試驗樣本中學習到的知識做出決策。同時可以發現,僅使用地面標定試驗數據訓練的非融合神經網絡(藍色標記點)對少數幾個測試樣本的預測值極大地偏離了真實值,這可能是由于測試樣本與訓練樣本偏差較大,對此,本文將于第3節做出討論;而對于除此以外的大多數樣本,其預測效果都比其他兩種非融合神經網絡更好,說明其他兩種非融合神經網絡由于受到仿真誤差的影響,預測表現不佳。因此本文選取僅使用地面標定試驗數據訓練的非融合神經網絡作為與本文提出的補償式、映射式神經網絡模型分析對比的基準。
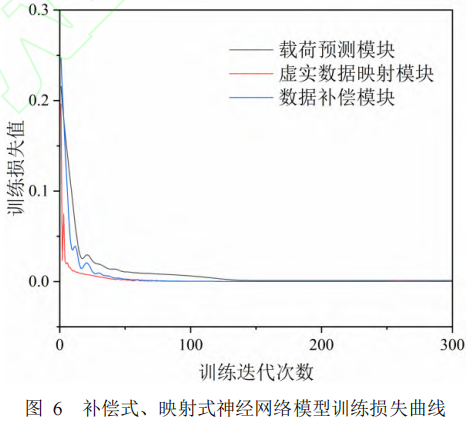
在訓練過程中,映射式以及補償式神經網絡模型中各個模塊的訓練損失值如圖6所示,可見訓練過程中損失值收斂穩定,大約在迭代次數為300時即可得到圖7結果。
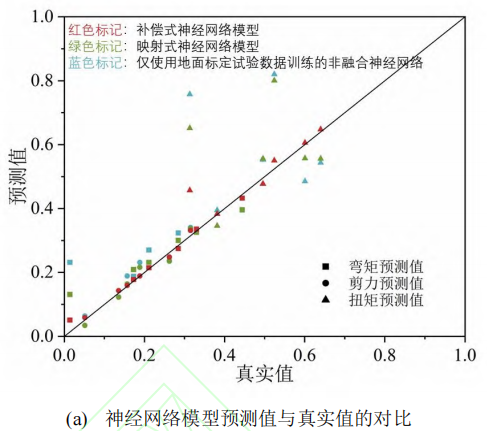
補償式、映射式神經網絡模型以及僅使用地面標定試驗數據訓練的非融合神經網絡對于地面標定試驗數據集中各測試樣本的預測結果如圖7所示,其中,圖7(a)為三種神經網絡模型的預測值與真實值的對比,圖7(b)為三種神經網絡模型的預測均方根誤差對比。均方根誤差的計算公式如下:
可以看出,相比于僅使用地面標定試驗數據訓練的非融合神經網絡,補償式、映射式神經網絡模型的預測效果均有所提升,這說明融合來自虛擬標定實驗與地面標定試驗的兩種試驗數據,可以改善神經網絡模型的預測效果。
在大多數測試樣本中,盡管映射式神經網絡模型的預測效果優于僅使用地面標定試驗數據訓練的非融合神經網絡模型,但是其預測值與真實值的偏差仍然較大、且其預測均方根誤差僅有較小程度的降低。這是因為在映射式神經網絡模型中,虛實數據映射模塊的輸入信息過于單一,難以準確捕捉虛擬標定試驗數據與地面標定試驗數據之間的映射關系;因此,與僅使用地面標定試驗數據訓練的非融合神經網絡模型相比,映射式神經網絡模型的預測效果提升有限。
相比于映射式神經網絡模型,補償式神經網絡模型的預測效果明顯更優,在大多數測試樣本中,其預測值與真實值僅有微小偏差;與僅使用地面標定試驗數據訓練的神經網絡模型相比,補償式神經網絡模型的預測誤差大幅降低,其中彎矩載荷的預測均方根誤差降低了86.10%,剪力載荷的預測均方根誤差降低了41.76%,扭矩載荷的預測均方根誤差降低了75.75%。這是因為,補償式神經網絡模型的高保真度模塊不僅能接受測點應變信息作為輸入,同時還可以得到低保真度模塊的載荷參數預測值,接受的信息更加全面,也就能夠更加深入地挖掘出數據背后的深層規律。
綜上所述,本文提出的“試驗-仿真”標定數據融合方法可以有效提升神經網絡模型的預測精度;且相比于映射式神經網絡模型,采用補償式多級神經網絡架構的神經網絡模型可以更好地實現虛實數據的融合利用,大幅降低對載荷參數的預測誤差,初步解決了應變載荷關系模型對復雜載荷下飛機結構特性的認識“不夠廣”的問題。由于基于有限元仿真的虛擬標定試驗無需考慮各個加載點的限制載荷,所以使用這種數據融合方法也有潛力將應變載荷關系模型的預測能力擴展到大機動、大過載飛行工況,從而解決其對飛機結構實際特性的認識“不夠深”的問題。未來,還可以使用能夠考慮時序信息的神經網絡模型,將本方法的適用范圍拓展到動載荷預測。
03
模型對樣本認知程度的討論
對大多數測試樣本而言,補償式虛實融合神經網絡模型能夠獲得與真實值相對一致的預測結果,但仍有部分預測結果明顯偏離了零誤差線(如圖7(a)中橫坐標約為0.3、縱坐標約為0.47的紅色三角形數據點——偏差超過45%),這說明神經網絡模型在訓練過程中沒有學習到此類樣本的有效信息,導致其對此樣本的認知程度較差,給出的預測結果的準確度較低。
因此,在發展虛實數據融合的機翼應變載荷關系神經網絡模型時,有必要同步考量模型對樣本的認知程度,將模型訓練時未能充分學習到的樣本識別出來,從而對神經網絡的不可靠預測結果做出有效預警。
3.1嵌入子學習器的應變載荷關系神經網絡模型
由于不可能對各虛擬工況都開展地面標定試驗而獲得載荷實際值,實際工作中無法通過預測值與實際值的偏差來識別應變載荷關系神經網絡模型對樣本的認知程度,因此,考量模型對樣本的認知程度,必須依據模型預測誤差之外的其他參量。
不同神經網絡模型(用相同訓練集數據訓練獲得)對同樣本預測結果的方差,是滿足上述需求的一個參量,能夠有效反映模型對樣本識別程度和預測可靠性。原因在于:如果某一樣本與神經網絡模型的訓練樣本較為接近,神經網絡模型在訓練階段已經充分地學習了這類樣本,那么各神經網絡模型會給出比較統一的預測,反映為各神經網絡模型預測結果的方差就比較小;相反,如果某一樣本與神經網絡模型的訓練樣本偏差較大,神經網絡模型在訓練階段就無法充分地學習這類樣本,導致各個神經網絡模型對這一樣本的認知不統一,最終就會給出分歧程度較大的預測結果,反映為各神經網絡模型預測結果的方差比較大。
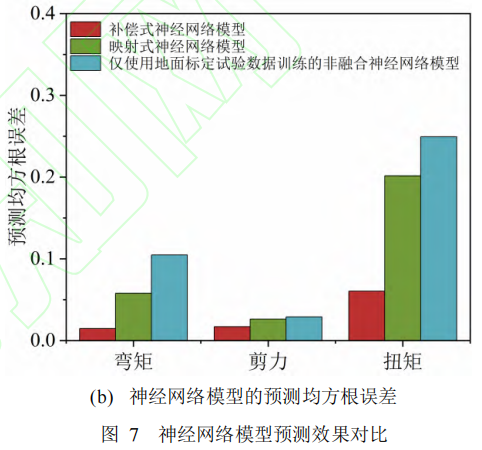
對此,本文提出了一種依據預測值方差的模型認知程度識別方法。該方法采用集成學習的思路,在補償式神經網絡模型中,嵌入若干個子學習器,從而人為地在虛實融合應變載荷關系神經網絡模型中創造多個描述相同映射關系的神經網絡子學習器,并通過計算各子學習器預測值的方差,來識別神經網絡模型對樣本的認知程度。嵌入子學習器的補償式應變載荷關系神經網絡模型如圖8所示,模型中各子學習器除隱藏層神經元數量不同外,其余完全相同。
3.2子學習器方差法認知程度識別效果驗證
基于嵌入子學習器的補償式神經網絡模型,使用子學習器預測方差對上述各個測試樣本進行神經網絡模型認知程度的度量。以扭矩載荷為例,在補償式神經網絡模型的數據補償模塊中,嵌入總共12個子學習器,各個子學習器的隱藏層神經元數量見表2。
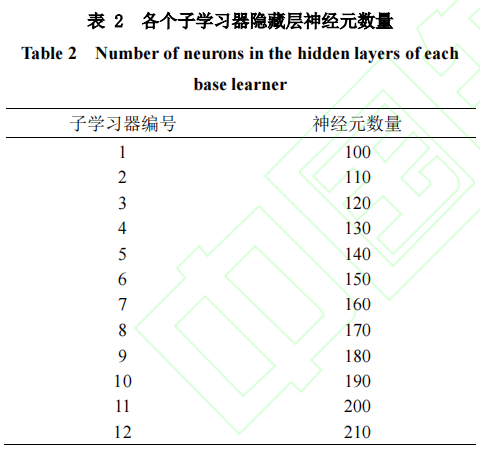
對于各個測試樣本,按照式(14)計算其神經網絡模型的預測值,見表3。可以看出,嵌入子學習器的神經網絡模型對1、2、4、5、6號測試樣本的認知程度較好,其相對預測誤差都在5%以內;對3號測試樣本的認知程度很差,其相對預測誤差高達42.06%。該結果與未嵌入子學習器的神經網絡模型是一致的。特別地,嵌入子學習器后,補償式神經網絡模型的預測相對誤差不但沒有上升、反而稍有降低,表明嵌入子學習器不但不會降低、反而能夠小幅提升神經網絡模型的預測能力。
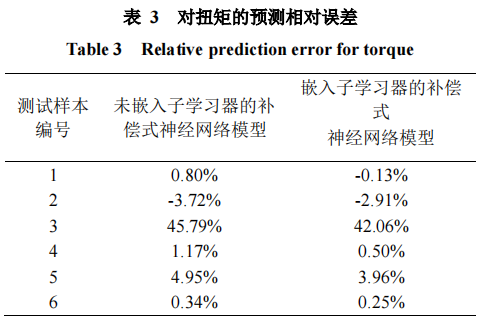
進一步,按照式(15)計算各個測試樣本的子學習器預測方差,如圖9所示。對于1、2、4、5、6號測試樣本,子學習器的預測方差都比較低,且大致處于同一數量級。特別地,對于編號為3的測試樣本,子學習器的預測方差明顯高于其他樣本,即各個子學習器的預測分歧程度較大,說明神經網絡模型在訓練階段未能充分學習到3號測試樣本的相關知識,導致對3號測試樣本的預測結果可信度較低。該結論與基于預測相對誤差的判別結果是一致的;換言之,子學習器方差法成功地指出了相對預測誤差最高的測試樣本,即有能力甄別出神經網絡模型認知程度較低的樣本。
綜上所述,基于嵌入子學習器的補償式神經網絡模型,采用子學習器的預測方差可以表征神經網絡模型對樣本的認知程度;使用子學習器方差法,可以正確識別神經網絡模型認知程度差的樣本,從而對神經網絡模型的不可靠輸出做出預警。
3.3子學習器數量對識別效果的影響
在對樣本認知程度的識別過程中,判別效果可能會受到子學習器數量的影響:如果子學習器的數量太少,則計算出來的預測方差可能不具有代表性,導致誤判的發生;但如果子學習器的數量過多,效果不會顯著提升,還會增加訓練時間的負擔。對此,本節研究了子學習器數量對預測方差的影響。使用包含不同數量子學習器的神經網絡模型,對各個測試樣本進行認知程度辨識,計算其預測方差,繪制成圖10所示的曲線。
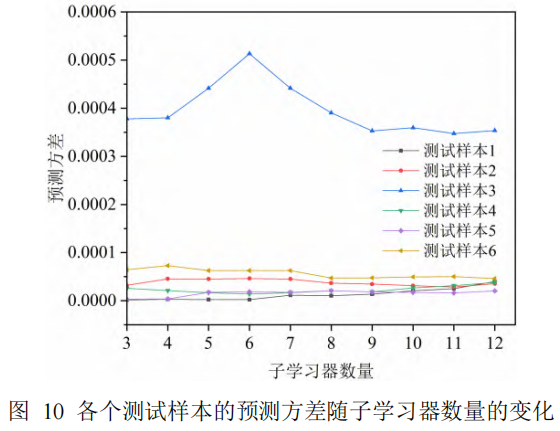
可以看出,隨著子學習器數量的增加,除了測試樣本3以外的測試樣本的預測方差基本都較穩定地維持在一個較小的變化范圍內。特別地,神經網絡模型對測試樣本3的預測方差首先有一個明顯增高的趨勢,這是由于當子學習器數量較少時,每新增一個子學習器就會對預測方差帶來較大的影響;隨著子學習器數量的增加,預測方差最終逐漸趨于穩定,亦表明基于子學習器的判別方法是穩定的。
因此,對于本文中的樣本數據和神經網絡模型而言,可認為將子學習器的數量設置為8個或以上,能達到較好的判斷效果;對于其他樣本數據,同樣可依據上述方法研究適合的子學習器數量。
04
結論
本文建立了映射式與補償式兩種融合“試驗-仿真”標定數據的多級神經網絡架構,并提出了在多級神經網絡中嵌入子學習器以識別對樣本認知程度的方法,形成了精度高、適用性廣、能夠預警不可靠輸出的機翼應變載荷關系神經網絡模型,并利用某縮比機翼的有限元仿真及地面標定試驗對上述模型進行了驗證。研究得到的具體結論如下:
1.相比于僅使用地面標定試驗數據建立機翼的應變載荷關系神經網絡模型,融合“試驗-仿真”標定數據可以顯著提升預測精度,且補償式架構的載荷預測效果優于映射式架構。
2.與僅使用地面標定試驗建立的應變載荷關系模型相比,基于補償式架構的應變載荷關系神經網絡模型最高可以將彎矩、剪力、扭矩的預測均方根誤差降低86.10%、41.76%、75.75%。
3.子學習器方差法能夠度量應變載荷關系神經網絡模型對樣本的認知程度,有效判別出型在訓練階段學習得不夠充分的樣本,從而對其不可靠預測結果做出預警。
-
神經網絡
+關注
關注
42文章
4765瀏覽量
100562 -
模型
+關注
關注
1文章
3178瀏覽量
48730 -
數據融合
+關注
關注
0文章
45瀏覽量
10345
原文標題:融合“試驗-仿真”標定數據的機翼應變載荷關系神經網絡模型
文章出處:【微信號:AMTBBS,微信公眾號:世界先進制造技術論壇】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
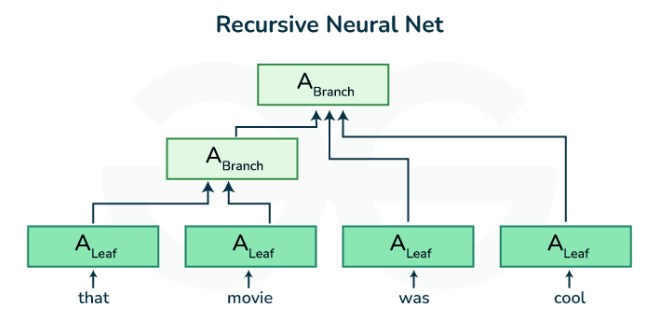
遞歸神經網絡和循環神經網絡的模型結構





 工商網監
工商網監
評論