 硬件工程師面試基礎知識點
硬件工程師面試基礎知識點
一、晶振電路
大多數電子工程師都見過單片機中如下圖所示的形式,一般單片機都會有這樣的電路。晶振的兩個引腳與芯片(如單片機)內部的反相器相連接,再結合外部的匹配電容CL1、CL2、R1、R2,組成一個皮爾斯振蕩器(Pierce oscillator)
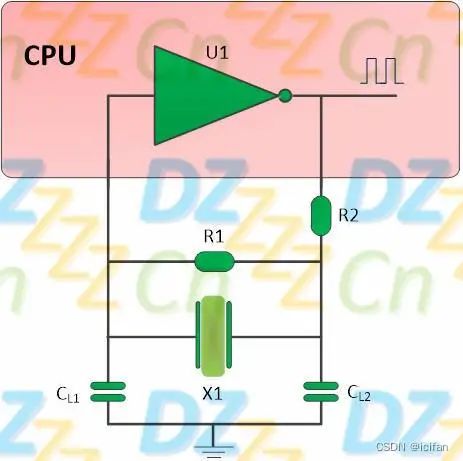
上圖中,U1為增益很大的反相放大器,CL1、CL2為匹配電容,是電容三點式電路的分壓電容,接地點就是分壓點。以接地點即分壓點為參考點,輸入和輸出是反相的,但從并聯諧振回路即石英晶體兩端來看,形成一個正反饋以保證電路持續振蕩,它們會稍微影響振蕩頻率,主要用與微調頻率和波形,并影響幅度。X1是晶體,相當于三點式里面的電感
R1是反饋電阻(一般≥1MΩ),它使反相器在振蕩初始時處于線性工作區,R2與匹配電容組成網絡,提供180度相移,同時起到限制振蕩幅度,防止反向器輸出對晶振過驅動將其損壞。
這里涉及到晶振的一個非常重要的參數,即負載電容CL(Load capacitance),它是電路中跨接晶體兩端的總的有效電容(不是晶振外接的匹配電容),主要影響負載諧振頻率和等效負載諧振電阻,與晶體一起決定振蕩器電路的工作頻率,通過調整負載電容,就可以將振蕩器的工作頻率微調到標稱值。
負載電容的公式如下所示:
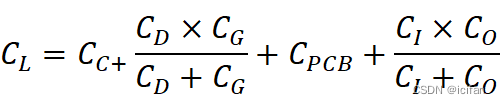
CL=CC+CD×CGCD+CG+CPCB+CI×COCI+CO
其中,CS為晶體兩個管腳間的寄生電容(Shunt Capacitance)
CD表示晶體振蕩電路輸出管腳到地的總電容,包括PCB走線電容CPCB、芯片管腳寄生電容CO、外加匹配電容CL2,即
CD=CPCB+CO+CL1

CG表示晶體振蕩電路輸入管腳到地的總電容,包括PCB走線電容CPCB、芯片管腳寄生電容CI、外加匹配電容CL1,即
CG=CPCB+CI+CL2

一般CS為1pF左右,CI與CO一般為幾個皮法,具體可參考芯片或晶振的數據手冊
(這里假設CS=0.8pF,CI=CO=5pF,CPCB=4pF)。
比如規格書上的負載電容值為18pF,則有
18pF=0.8+CD×CGCD+CG
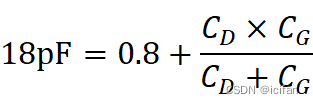
18pF=0.8+CD2=0.8+CG2

則CD=CG=34.4pF,計算出來的匹配電容值CL1=CL2=25pF
二、LDO選型
1.LDO工作原理
LDO核心架構:P-MOS+運放
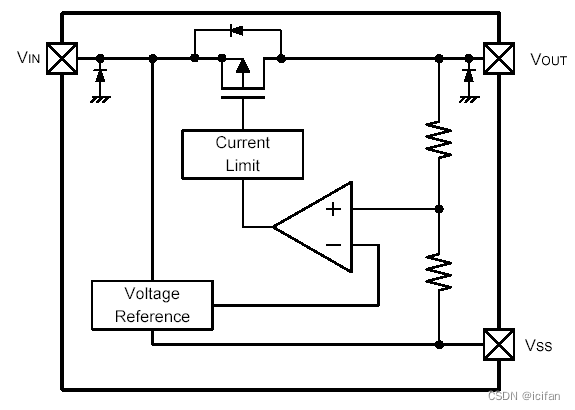
LDO工作原理就一句話:通過運放調節P-MOS的輸出。運放控制P-MOS的打開程度。
LDO內部產生一個基準電壓,作為運放的反向電壓,將LDO的輸出電壓通過分壓作為運放的正向輸入電壓。運放的輸出去控制P-MOS管的工作狀態。
P-MOS,相當于一個壓控的可變電阻。
P-MOS處于線性電阻區,可看成一個壓控可變電阻。輸入的VIN電壓,經過這個P-MOS管后變為輸出電壓,這里P-MOS管的作用為將輸入電壓通過P-MOS的線性電阻區,將電壓動態衰減值VOUT電壓。
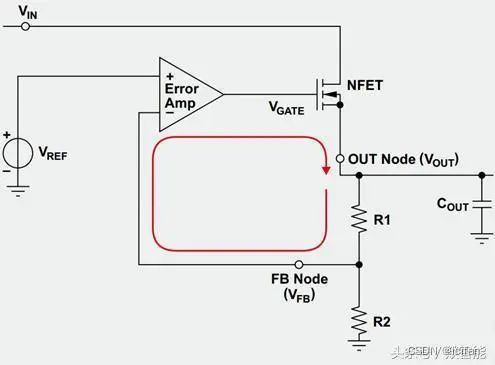
LDO的負反饋回路
2.輸入電壓
最小的輸入電壓 VIN 必須大于 VOUT + VDO。需要注意,這與器件 Datasheet 中所給出的輸入電壓最小值無關。
3.效率
LDO的工作原理是通過負反饋調整輸出電流使輸出電壓保持不變。LDO是一個降壓型的DC/DC 轉換器,因此Vin > Vout,它的工作效率:
η= Pout/Pin=(Iout×Vout)/(Iin×Vin)
η= (Iout×Vout)/((Iout+Ignd)×Vin)
LDO的工作效率一般在60~75%之間,靜態電流小的效率會好一些。在忽略 LDO 靜態電流的情況下,可以采用 VOUT / VIN 式子來計算效率。
4.功耗
計算例子見 附錄一:LDO使用之熱阻考慮。
Pd=(Vin-Vout)×Iout+Vin×Ignd
式中,Ignd:接地電流有時也記作Iq:靜態電流。因為Ignd很小,所以一般估算為:
Pd=(Vin-Vout)xIout。
最大允許功耗(PDMAX)是最大環境溫度(TA),最大允許結溫(TJMAX)(+125°C) 和結點到空氣間熱阻(RθJA) 的函數。對于安裝在典型雙層FR4 電解銅鍍層PCB板上的5引腳SOT-23A封裝器件,其(RθJA)約為250°C/Watt。
PDMAX=(TJMAX-TA)/RθJA
將計算出的Pd代入上式,可求出 TJ,然后將TJ與datasheet給出的最大允許節溫相比較,如果TJ
一般電源LDO允許的最大節溫為125°C。所以,可以計算出PDMAX,滿足PD<=PDMAX即可。
************
熱阻的計算:
RθJA = RθJC +RθCS + RθSA
其中:RθJA為LDO結到周圍環境的熱阻
RθJC為LDO結到表面(封裝)的熱阻
RθCS為LDO表面(封裝)到散熱片的熱阻
RθSA為LDO散熱片到周圍環境的熱阻
************
5.電源抑制比PSRR
用最通俗的話解釋就是,電源的輸入與輸出的紋波的比值,PSRR越高,表明LDO對于紋波的抑制效果更好,打個比方輸入紋波為10mV,PSRR 為75dB,那么輸出的紋波幅度為1.8uV(紋波降低約5623倍)。
6.線性調整率 Line Regulation
定義: 又稱源效應或電網調整率,是指輸出電壓隨輸入電壓的線性變化的波動,條件是全滿載。(輸入電壓在額定范圍內變化時,輸出電壓之變化率. )
Line Regulation(+)=(Vmax-Vnor)/Vnor
Line Regulation(-)=(Vnor-Vmin)/Vnor
Line Regulation=(Vmax-Vmin)/Vnor
Vnor:輸入電壓為常態值,輸出為滿載時之輸出電壓.
Vmax:輸入電壓變化時之最高輸出電壓.
Vmin:輸入電壓變化時之最低輸出電壓.
說明:如只是簡單計算Line Regulation ,Vnor可用Vrated即輸出電壓標稱值。
檢驗方法:輸出全滿載,在輸入電壓全范圍內測量輸出電壓,觀察示波器及萬用表,記下輸入電壓全范圍變化時的輸出電壓最大和最小值,利用上述公式求得線性調整率。
7.負載調節率 (Load Regulation)
定義: 又稱負載效應,是指輸出電壓隨負載變化的波動,條件是輸入為額定電壓。電源負載的變化會引起電源輸出的變化,負載增加,輸出降低,相反負載減少,輸出升高。好的電源負載變化引起的輸出變化減到最低,通常指標為3%~5%。
Line Regulation(+)=(Vml-Vhl)/Vhl
Line Regulation(-)=(Vhl-Vfl)/Vhl×100%
Line Regulation(%)=(Vml-Vfl)/Vhl×100%
Vml:最小負載時之輸出電壓
Vfl:滿載時之輸出電壓
Vhl:半載時之輸出電壓
說明:如只是簡單計算Load Regulation,Vhl可用Vrated即標稱電壓來代替.
檢驗方法:輸入為額定電壓,分別在負載為空載、全滿載兩種輸出情況下,負載反復投切。觀察示波器及萬用表,測量輸出電壓幅值和波形,記下投切過程中的輸出電壓最大和最小值,利用上述公式求得負載調整率。例如某5V直流穩壓電源的輸出電流從0增加到最大電流1A,它的輸出電壓從5.00V降到了4.50V,降落值0.5V除以標稱輸出電壓5V,得到10%,這就是該電源的負載調整率。
8.靜態電流
靜態電流往往在我們設計超低功耗產品時重點關注,比如,一款藍牙設備,整機待機狀態電流僅為1.5uA,但LDO靜態電流如果高達70uA甚至更高將嚴重影響待機時間,我們必須選擇靜態電流在uA級別的LDO來滿足設計要求。
9.噪聲
噪聲是衡量一個LDO性能的最關鍵參數,噪聲可以通過兩種手段降至最低,第一,選擇本底噪聲很低的LDO型號,第二在電路設計中將可能引入的電源噪聲降至最低。但我們選型和設計中沒必要吹毛求茲,選擇能夠滿足電路要求的LDO即可。選擇合適的才是最好的。
10.輸出電容器
輸出電容器的 ESR 對于器件的穩定性來說至關重要。有的 LDO 聲明采用具有較高 ESR 的鉭電容器,那么一定不要選用極低 ESR 的陶瓷電容器。然而有的 LDO 能夠在未采用輸出電容器或者只采用了低 ESR 的陶瓷類型的輸出電容器,穩定性就可以保證。曾經看到有的資料據此認為,“可以確認,可在采用任何類型的輸出電容器的情況下具有穩定的工作特性。”---這點我一直不敢茍同,實在值得商榷。作為設計人員,應嚴格按照具體 LDO 器件的 Datasheet 選擇最為合適類型的輸出電容器。
11.反向泄漏保護
在某些 LDO 的輸出端上的電壓高于輸入端的電壓的特殊應用中,反向泄漏保護可以有效防止電流從 LDO 的輸出端流向輸入端。如果忽視這點,這種反向泄漏會損壞輸入電源,特別是當輸入電源為電池的時候,尤其需要重視。
如果負載端為 RF、音頻或其他對噪聲敏感的應用,那么應選擇具有高電源紋波抑制(PSRR)的 LDO,以實現對輸入電源的抗噪性,以及低輸出噪聲(〈50uVms)。有的 LDO 具有一個用來增加電容以降低輸出噪聲的旁路(BP)引腳,亦可起到一定作用。
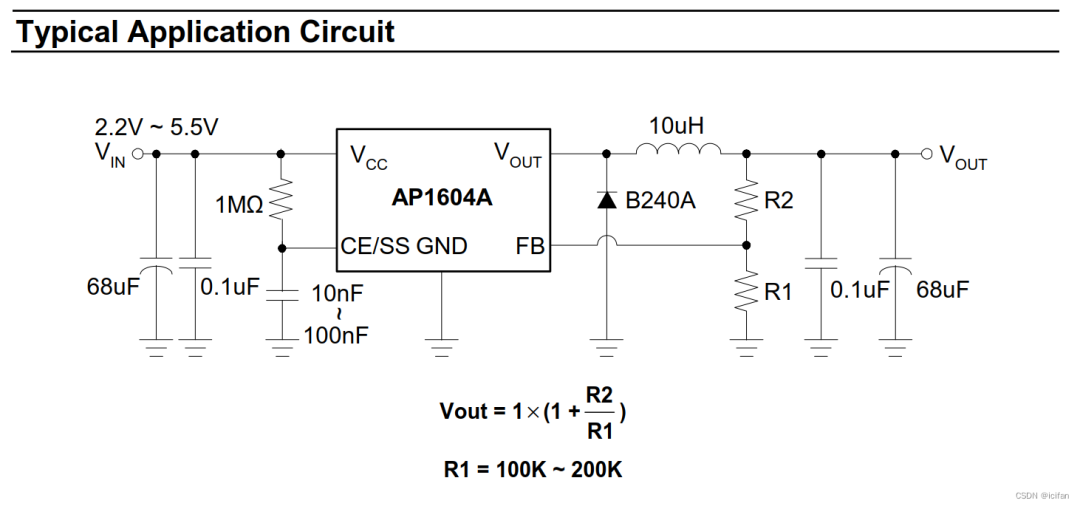
LDO應用
LDO的應用電路十分簡單方便,它工作時僅需要二個作輸入、輸出電壓退耦降噪的陶瓷電容器。
Vin和Vout的輸入和輸出濾波電容器應當選用寬范圍、低等效串聯電阻(ESR)、低價陶瓷電容器,使LDO在零到滿負荷的全部量程范圍內具有良好的穩壓效果。一些LDO有一個“Bypass”管腳,由它連接一個小的電容器,可以進一步降低噪音。
LDO的工作效率一般在60~75%之間,靜態電流小的效率會好一些。
輸入電壓,壓差電壓(VDO)
線性穩壓器件的壓差電壓常常被誤解。正如上面討論的,VI和VO之間的電壓差是通過線性穩壓器后的壓降。對于固定的負載電流,線性穩壓器的輸入與輸出的電壓降越小功率散耗就越低。壓差電壓是LDO穩壓器技術指標中定義的能夠穩壓工作時VI和VO之間最小的差值又稱為VDO。
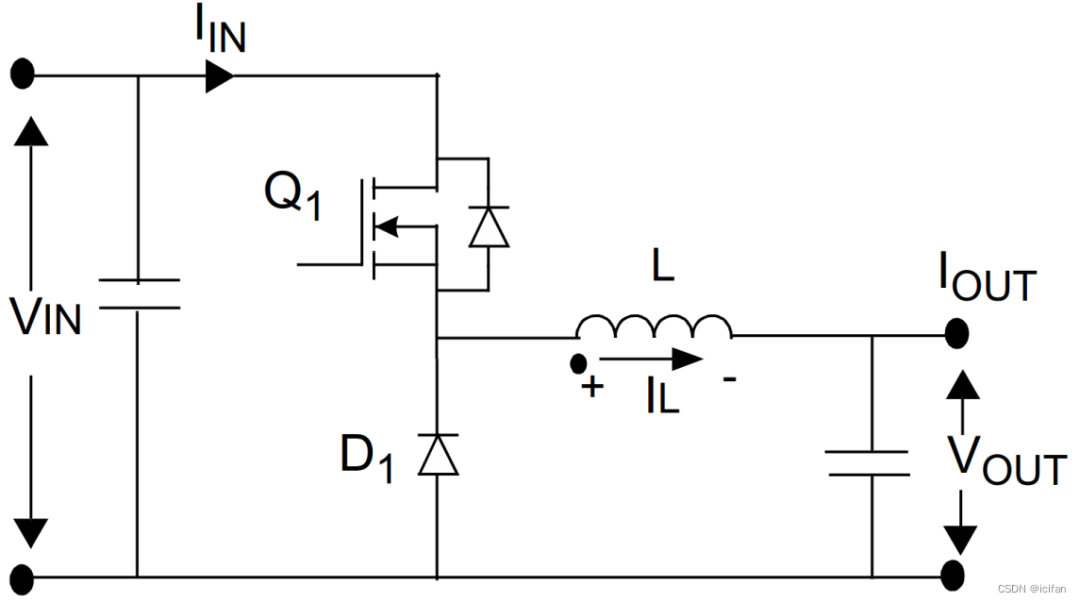
三、DC-DC
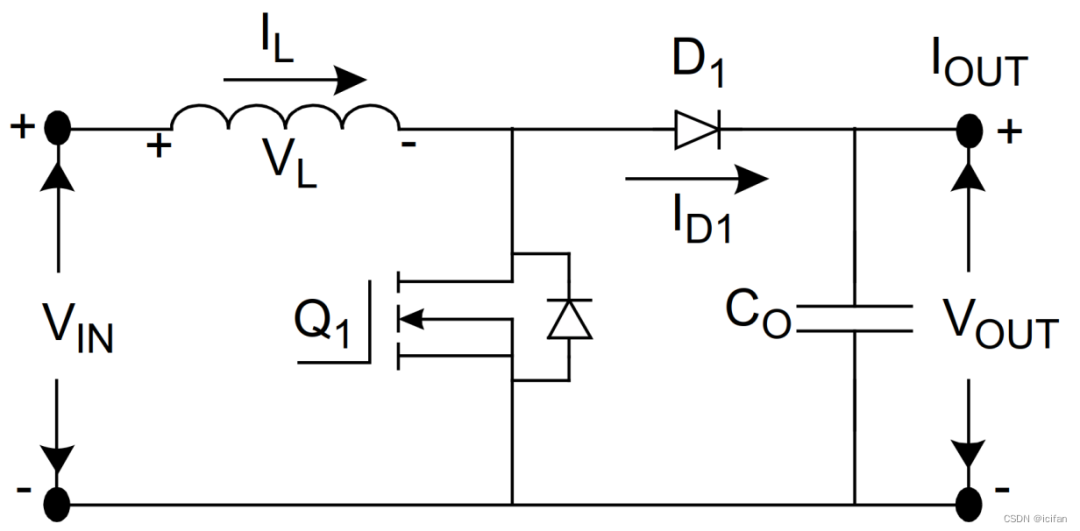
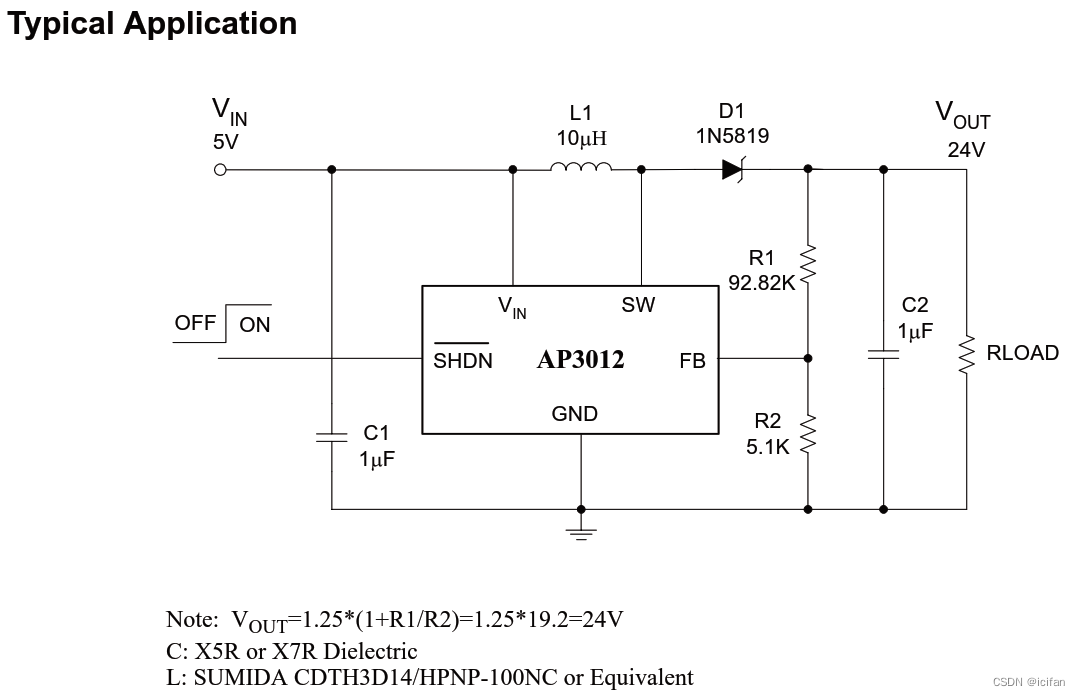
2.升壓轉換器-Boost Converter
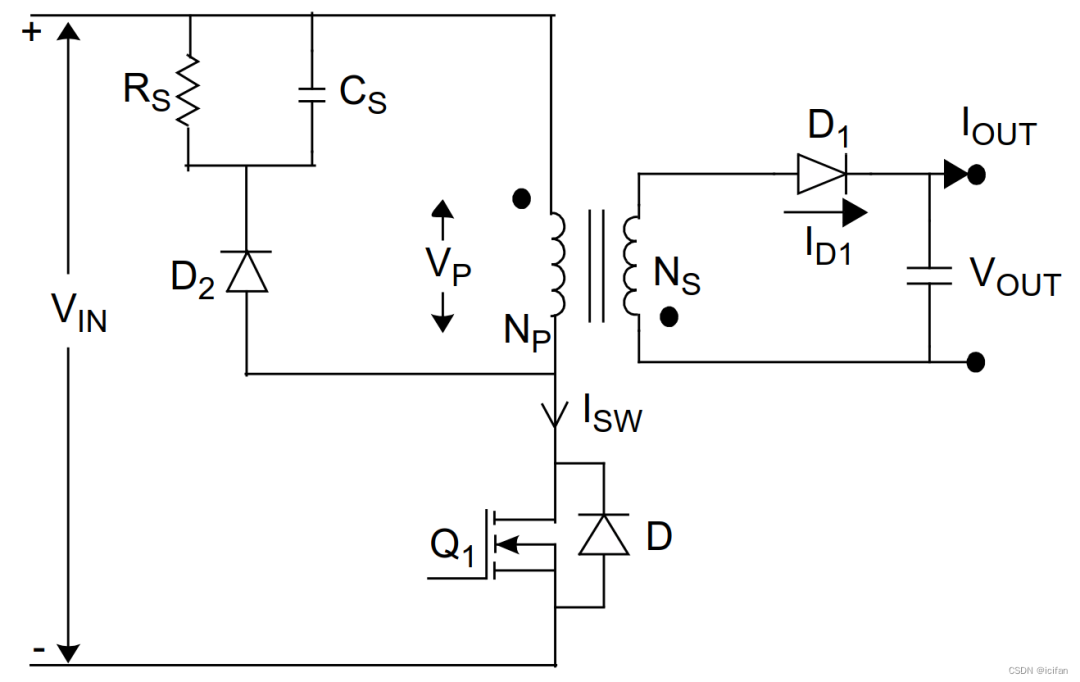
3.反激轉換器-Flyback Converter
四、通訊接口
1.USB 總線
現USB標準中,按照速度等級和連接方式分為以下七種版本。注意USB-IF當前正式的主版本號只有USB 2.0和USB 3.2兩個。
2.UART
RS232:傳輸速率一般不超過20Kbps,速率低,抗干擾能力差,RS-232C能傳輸的最大距離不超過15m(50英尺)。
RS422:定義了一種平衡通信接口,將傳輸速率提高到10Mbps,傳輸距離延長到4000英尺(速率低于100Kbps時),并允許在一條平衡總線上連接最多10個接收器。RS-422是一種單機發送、多機接收的單向、平衡傳輸規范,被命名為TIA/EIA-422-A標準。
RS485:增加了多點、雙向通信能力,即允許多個發送器連接到同一條總線上,同時增加了發送器的驅動能力和沖突保護特性,擴展了總線共模范圍,后命名為TIA/EIA-485-A標準。最高傳輸速率10Mbps,抗干擾能力強,可以傳距離1.5km。
平衡雙絞線的長度與傳輸速率成反比,在100Kbps速率以下,才可能使用規定最長的電纜長度。只有在很短的距離下才能獲得最高速率傳輸。一般100米長雙絞線最大傳輸速率僅為1Mbps。
3.SPI
全雙工通信,傳輸速率可達幾Mbps水平,比I2C快。
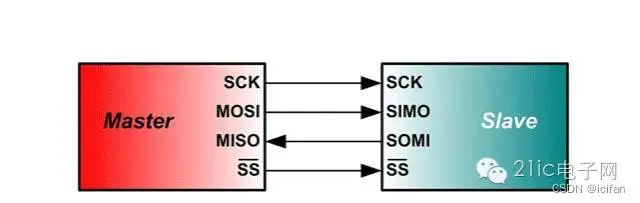
SPI的通信原理很簡單,它以主從方式工作,這種模式通常有一個主設備和一個或多個從設備,需要至少4根線,事實上3根也可以(單向傳輸時)。也是所有基于SPI的設備共有的,它們是SDI(數據輸入)、SDO(數據輸出)、SCLK(時鐘)、CS(片選)。
(1)SDI – Serial Data In,串行數據輸入;
(2)SDO – Serial Data Out,串行數據輸出;
(3)SCLK – Serial Clock,時鐘信號,由主設備產生;
(4)CS – Chip Select,從設備使能信號,由主設備控制。
4.I2C
半雙工,只有2根線。數據線和時鐘線。
標準速度:100kbps
快速模式:400kbps
高速模式:3.4Mbps
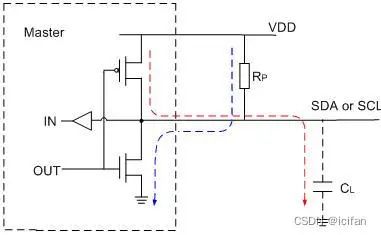
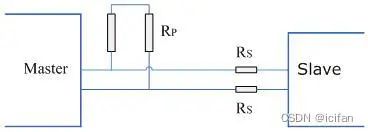
在大多數情況下,由于I2C接口采用Open Drain機制,器件本身只能輸出低電平,無法主動輸出高電平,只能通過外部上拉電阻RP將信號線拉至高電平。因此I2C總線上的上拉電阻是必須的,如圖所示。
因為I2C總線在空閑時必須拉高,只有是高的才能拉成低的,所以這是之所以規定空閑時必須為高的一個原因,要是保持“低”的話,那是不可能成為“多主”總線的。
其實I2C總線接口在工作時只會檢測高低電平,他不會在乎有無上拉電阻的問題,所以總線必須滿足時序要求。
上拉電阻的大小,會牽扯到兩個問題,一個是功耗,一個是速度問題,兩者是一個矛盾體。如果你想盡量提高速度,那么就牽涉到總線電容的問題,其實很容易理解,上拉電阻與總線的電容形成了RC,高速時將直接影響通訊!因為總線拉高時有個充電時間以及高電平的閥值,如果還沒有充電到足以保證從器件可以識別的高電平的閥值時主器件就以為完成了一個總線動作的話,那么通訊肯定是不能進行的!
如果你想盡可能降低功耗,那么就要盡可能增大電阻以最大可能的減小電路各部分的消耗電流從而實現整體降低功耗!但不可能無限大,否則充電時間你會受不了的!
I2C協議還定義了串聯在SDA、SCL線上電阻Rs。該電阻的作用是,有效抑制總線上的干擾脈沖進入從設備,提高可靠性。這個電阻的選擇一般在100~200ohm左右。當然,這個電阻并不是必須的,在惡劣噪聲環境中,可以選用。
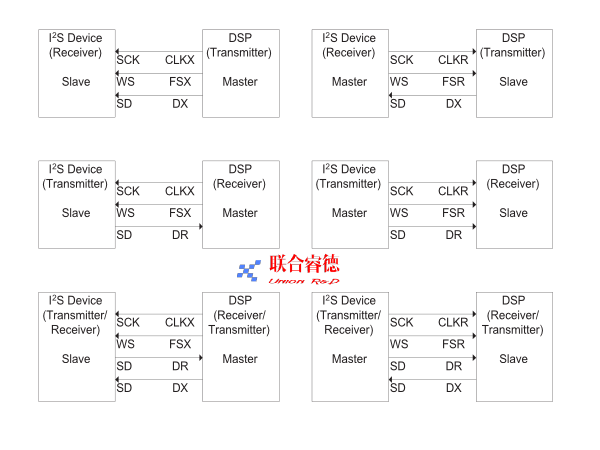
5.I2S
I2S有4個主要信號:
串行時鐘SCLK,也叫位時鐘(BCLK),即對應數字音頻的每一位數據,SCLK都有1個脈沖。SCLK的頻率=2×采樣頻率×采樣位數。
幀時鐘LRCK,(也稱WS),用于切換左右聲道的數據。LRCK為“1”表示正在傳輸的是左聲道的數據,為“0”則表示正在傳輸的是右聲道的數據。LRCK的頻率等于采樣頻率。
串行數據SDATA,就是用二進制補碼表示的音頻數據。
有時為了使系統間能夠更好地同步,還需要另外傳輸一個信號MCLK,稱為主時鐘,也叫系統時鐘(Sys Clock),是采樣頻率的256倍或384倍。在DAC內部的delta-sigma調制器以及數字濾波器都需要用到這個時鐘,大部分的DAC可以使用內部的振蕩器產生這個時鐘,在某些要求較高的場合,例如HIFI音響系統等,需要使用一個額外的高質量的時鐘用以獲得最好的性能。這時候就需要用到MCLK信號了。切記,MCLK并不是必須的。可有可無,看設計要求。
6.Ethernet
也就是通常的網速。
早期的以太網傳輸速率只有10Mbps。
百兆網:理論上最大100Mbps。
千兆網:理論上最大1Gbps。
7.SD總線
最高能達10Mbps。
8.SATA接口
SATA1.0:理論傳輸速度是150MB/s(或者1.5Gb/s),實際也就30MBps。
SATA2.0:300MBps,即3Gbps。實際也就80MBps。
SATA3.0:600MBps,即6Gbps。
eSATA:理論傳輸速度可達到1.5Gbps或3Gbps。
9.PCI總線
PCI:32位,33MHz時鐘頻率,數據傳輸速率 = 33 MHz * 32 bits / 8 bits/byte = 132 MBps ≈ 1.056 Gbps。
PCI 2.1:64位,66MHz時鐘頻率來說:數據傳輸速率 = 66 MHz * 64 bits / 8 bits/byte = 528 MBps ≈ 4.224 Gbps。
10.CAN總線
CAN,全稱為“Controller Area Network”,即控制器局域網,是國際上應用最廣泛的現場總線之一。
直接通信距離最遠可達10km(速率4Kbps以下)。
通信速率最高可達1MB/s(此時距離最長40m)。
可以多主方式工作,網絡上任意一個節點均可以在任意時刻主動地向網絡上的其他節點發送信息,而不分主從,通信方式靈活。
網絡上的節點可分成不同的優先級,可以滿足不同的實時要求。
采用非破壞性位仲裁總線結構機制,當兩個節點同時向網絡上傳送信息時,優先級低的節點主動停止數據發送,而優先級高的節點可不受影響地繼續傳送數據。
可以點對點,一點對多點及全局廣播幾種傳送方式接收數據。
11.PCI-e
PCI Express 總線頻率 2500 MHz,這是在 100 MHz 的基準頻率通過鎖相環振蕩器(Phase Lock Loop,PLL)達到的。
串行總線帶寬(MB/s) = 串行總線時鐘頻率(MHz) * 串行總線位寬(bit/8 = B) * 串行總線管線 * 編碼方式 * 每時鐘傳輸幾組數據(cycle)
PCI Express x1 總線位寬是 1位,總線頻率 2500 MHz,串行總線管線是 1 條,每時鐘傳輸 2組數據,編碼方式為 8b/10b,它的帶寬為 476.84 MB/s,即 3814.7 Mbps。(帶寬是 PCI 的 3.75 倍。)
公式是 2500000000(Hz) * 1/8(bit) * 1(條管線) * 8/10(bit) * 2(每時鐘傳輸2組數據) = 500000000 B/s = 476.8371582 MB/s,即 3814.6972656 Mbps。
下面給出其它類型組合的帶寬。
PCI Express x2 的帶寬為 953.68 MB/s,即 7629.4 Mbps。(此模式僅用于主板內部接口而非插槽模式)
PCI Express x4 的帶寬為 1907.36 MB/s,即 15258.9 Mbps。
PCI Express x8 的帶寬為 3814.72 MB/s,即 30517.8 Mbps。
PCI Express x16 的帶寬為 7629.44 MB/s,即 61035.5 Mbps。(帶寬是 AGP 8X 的 3.75 倍。)
PCI Express x32 的帶寬為 15258.88 MB/s,即 122071 Mbps。
五、典型運放應用
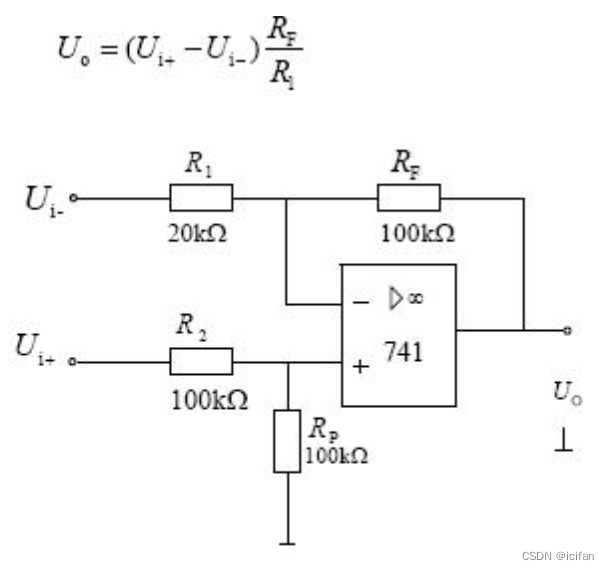
1.差分放大器
差分放大電路的輸入信號是從集成運放的反相和同相輸入端引入,如果反饋電阻RF等于輸入端電阻R1,輸出電壓為同相輸入電壓減反相輸入電壓,這種電路也稱作減法電路。
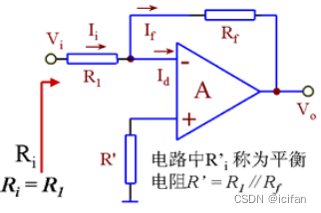
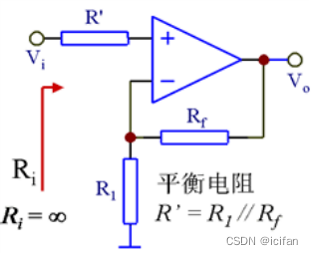
2.反相放大器
基本電路、電壓并聯負反饋輸入端虛短、虛斷。運放的平衡電阻是用來平衡運放的兩個輸入端子的失調電流的,使得兩個端子的電壓平衡,從而使運放的偏置電流不會產生附加的失調電壓。
Vo = -Vi*(Rf / R1)
特點:
反相端為虛地,所以共模輸入可視為0,對運放共模抑制比要求低
輸出電阻小,帶負載能力強
要求放大倍數較大時,反饋電阻阻值高,穩定性差。
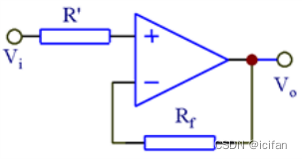
3.同相放大器
1. 基本電路:電壓串聯負反饋
特點:
輸入電阻高,輸出電阻小,帶負載能力強
V-=V+=Vi,所以共模輸入等于輸入信號,對運放的共模 抑制比要求高
4.電壓跟隨器
輸入電阻大輸出電阻小,能真實地將輸入信號傳給負載而從信號源取流很小 。
5.運算典型參數
輸入偏置電流 (Input Bias Current):這是流入或流出輸入引腳的最小電流。如果在運放前級處理低電流,這一點非常重要。此外,它也可以作為應力導致性能偏離的指標,因為這種類型的漏電流對輻射等應力非常敏感。
輸入失調電流 (Input Offset Current):這是兩個輸入的偏置電流之間的差值。
輸出失調電壓 (Output Offset Voltage):這是當輸入設置為某個固定參考值(通常是地或中間電壓)時,其理想直流輸出與實際直流輸出之間的差值。
輸入失調電壓 (Input Offset Voltage):這是必須施加到輸入端的電壓,以將輸出恢復到理想水平,即模擬地或中間電壓。
轉換速率 (Slew Rate):這是輸出電壓變化的最大速率。這在使用運放處理突變信號(如時鐘或圖像傳感器輸出)時尤為重要。
帶寬 (Bandwidth):這表示頻率響應,通常以閉環大/小信號3dB帶寬或增益帶寬積表示。在電壓反饋運放中,閉環增益與該增益下的3dB閉環帶寬的乘積是一個常數。
開環增益 (Open-Loop Gain):這是運放在沒有正反饋或負反饋時的增益。
共模抑制比 (CMRR):如果施加差分輸入電壓,理想情況下輸出不應受共模電壓的影響。CMRR是共模增益與差模增益的比值。
電源抑制比 (PSRR):這表示輸出不受電源電壓變化影響的能力。PSRR是電源電壓變化與輸出電壓變化的比值。
輸入共模電壓范圍 (Input Common-Mode Voltage Range):這是共模輸入電壓的范圍,如果超過這個范圍,會導致輸出信號的總諧波失真超過指定的最大或最小值。
輸出電壓擺幅 (Output Voltage Swing):這是在不發生波形削波的情況下,可以獲得的相對于零的最大正或負輸出。
靜態電流 (Quiescent Current):這是通常在輸出禁用或輸出電流接近零時消耗的電源電流。這個參數是設備變化的一個重要全局指標。
輸入電壓噪聲 (Input Voltage Noise):這是反映在輸入引腳的理想電壓源的內部噪聲電壓,通常以每赫茲平方根的伏特為單位表示。通常是噪聲頻率特性曲線在閃爍噪聲之后和白噪聲開始時的一個點。這個值在1nV/√Hz到20nV/√Hz之間變化。
輸入電流噪聲 (Input Current Noise):這與前一個類似,但以輸入端的電流形式表示。電流噪聲比電壓噪聲變化更大,取決于輸入結構。它可以在0.1fA/√Hz到幾個pA/√Hz之間變化。
EMC即電磁兼容(Electromagnetic Compatibility),是指電子、電氣設備或系統在預期的電磁環境中,按設計要求正常工作的能力,也是電子、電氣設各或系統的一項重要的技術性能。
EMC存在的三個要求:干擾源、耦合途徑、敏感裝置。
電磁干擾有傳導干擾和輻射干擾兩種。
傳導干擾是指通過導電介質把一個電網絡上的信號耦合(干擾)到另一個電網絡。
輻射干擾是指干擾源通過空間把其信號耦合(干擾)到另一個電網絡。
傳導、輻射、騷擾和干擾
在進行PCB的EMC設計時,常采用的措施有減少干擾源的強度、切斷耦合路徑和提高設備的抗干擾能力。
在進行信號完整性與電源完整性設計時,降低信號的過沖、下沖、反射,減緩信號上升沿和下降沿的速率,降低電源的目標阻抗等,也都是為了減少EMI輻射的強度,減少EMI包含的頻譜分量。
1.EMI(Electromagnetic Interference)——電磁干擾
即處在一定環境中的設備或系統正常運行時,不應產生超過相應標準所要求的電磁能量于擾。這樣的電磁干擾有:
電源線傳導騷擾(CE)測試;
信號、控制線傳導騷擾(CE)測試;
輻射騷擾(RE)則試;
諧波電流(Harmonic)測試;
電壓波動和閃爍(Fluctuation and Flicker)測試。
1. EMI測試
符合CISPR25(對應國標為GB18655)、CISPR12(對應國標為GB14023)、SAEJ551/5(對應國標為GB18387)標準的輻射騷擾測試;
符合CISPR25(對應國標為GB18655)標準的傳導耦合/瞬態發射騷擾測試。
2.EMS(Electromagnetic Susceptibility)——電磁抗敏感度
即處在一定環境中的設各或系統正常運行時,設各或系統能承受各種類型的電磁能量干擾。這種電磁能量干擾主要有:
靜電放電(ESD)抗擾度測試;
電源端口的電快速瞬變脈沖群(EFT/B)抗擾度測試;
信號線、控制線的電快速瞬變脈沖群(EFT/B)抗擾度測試;
電源端口的浪涌(SURGE)和雷擊測試;
信號線、控制線的浪涌(SURGE)和雷擊測試;
殼體輻射抗擾度(RS)測試;
電源端口的傳導抗擾度(CS)測試;
信號線、控制線的傳導抗擾度(CS)測試;
電源端口的電壓跌落與中斷測試(DIP)。
1. EMS測試
符合1507637-1/2標準規定的電源線傳導耦合/瞬態抗擾度測試;
符合1507637-3標準規定的傳感器電纜與控制電纜傳導耦合/瞬態抗擾度測試;
符合150114527(對應國標為GB17619)標準規定的射頻傳導抗擾度測試;
符合15011452-2(對應國標為GB17619)標準規定的輻射場抗擾度測試;
符合15011452-3(對應國標為GB17619)標準規定的橫電磁波(TEM)小室的輻射場抗擾度測試;
符合15011452-4(對應國標為GB17619)標準規定的大電流注入(BCI)抗擾度測試;
符合15011452-5(對應國標為GB17619)標準規定的帶狀線抗擾度測試;
符合15011452-6(對應囟標為GB17619)標準規定的三平板抗擾度測試;
符合15010605標準的靜電放電抗擾度測試。
對于汽車及車載電子設備,由于其電磁環境與供電環境相對特殊,其EMC測試也相對特殊,但也可分為EMI測試和EMS測試兩大類。它更加突出ISO、CISPR和SAEJ標準的重要性,具體的FMC測試項目有兩個。
EMC設計不能像硬件電路設計、結構設計、軟件設計等設計活動可以單獨存在,它依附于產品的其他設計活動中。如果一定要對EMC設計活動進行分類,那么主要包括:
1)產品的EMC標準和需求分析;
2)產品機械結構構架的EMC設計,包括產品中的電纜部分的設計;
3)電路原理圖的EMC設計;
4)PCB的EMC設計;
5)EMC測試過程中出現問題的改進
3.ESD防護
1)傳導性ESD防護
對靜電電流在電路中防護主要使用一些保護器件,在敏感器件前端構成保護電路,引導或耗散電流。此類保護器件有:陶瓷電容,壓敏電阻,TVS管等。
2)輻射性ESD防護
對于靜電產生的場對敏感電路產生影響,防護方法主要是盡量減少場的產生和能量,通過結構的改善增加防護能力,對敏感線路實施保護。對場的保護通常比較困難,在改良實踐中探索出了一種叫做等位體的方法。通過有效地架接,是殼體形成電位相同體,抑制放電。事實證明此種方式有效易于實施。
防護靜電的一般方法有許多,包括減少靜電的積累;使產品絕緣,防止靜電發生;對敏感線路提供支路分流靜電電流;對放電區域的電路進行屏蔽;減少環路面積以保護電路免受靜電放電產生的磁場的影響。有針對直接放電的,也有針對關聯場的耦合。
七、信號完整性SI-Signal Integrity
信號完整性是指信號在信號線上的質量。
信號具有良好的信號完整性是指當在需要的時候,具有所必需達到的電壓電平數值。差的信號完整性不是由某一單一因素導致的,而是板級設計中多種因素共同引起的。主要的信號完整性問題包括反射、振蕩、地彈、串擾等。
常見信號完整性問題及解決方法問題
1.反射Reflection
反射就是在傳輸線上的回波。信號功率(電壓和電流)的一部分傳輸到線上并達到負載處,但是有一部分被反射了。如果源端與負載端具有相同的阻抗,反射就不會發生了。
源端與負載端阻抗不匹配會引起線上反射,負載將一部分電壓反射回源端。如果負載阻抗小于源阻抗,反射電壓為負,反之,如果負載阻抗大于源阻抗,反射電壓為正。布線的幾何形狀、不正確的線端接、經過連接器的傳輸及電源平面的不連續等因素的變化均會導致此類反射。
2.串擾Crosstalk
串擾是兩條信號線之間的耦合,信號線之間的互感和互容引起線上的噪聲。容性耦合引發耦合電流,而感性耦合引發耦合電壓。PCB板層的參數、信號線間距、驅動端和接收端的電氣特性及線端接方式對串擾都有一定的影響。
3.過沖Overshoot和下沖Undershoot
過沖就是第一個峰值或谷值超過設定電壓——對于上升沿是指最高電壓而對于下降沿是指最低電壓。下沖是指下一個谷值或峰值。過分的過沖能夠引起保護二極管工作,導致過早地失效。過分的下沖能夠引起假的時鐘或數據錯誤(誤操作)。
4.振蕩Ringing和 環繞振蕩Rounding
振蕩的現象是反復出現過沖和下沖。信號的振蕩和環繞振蕩由線上過度的電感和電容引起,振蕩屬于欠阻尼狀態而環繞振蕩屬于過阻尼狀態。信號完整性問題通常發生在周期信號中,如時鐘等,振蕩和環繞振蕩同反射一樣也是由多種因素引起的,振蕩可以通過適當的端接予以減小,但是不可能完全消除。
5.地電平面反彈噪聲和回流噪聲
在電路中有大的電流涌動時會引起地平面反彈噪聲(簡稱為地彈),如大量芯片的輸出同時開啟時,將有一個較大的瞬態電流在芯片與板的電源平面流過,芯片封裝與電源平面的電感和電阻會引發電源噪聲,這樣會在真正的地平面(0V)上產生電壓的波動和變化,這個噪聲會影響其它元器件的動作。負載電容的增大、負載電阻的減小、地電感的增大、同時開關器件數目的增加均會導致地彈的增大。
由于地電平面(包括電源和地)分割,例如地層被分割為數字地、模擬地、屏蔽地等,當數字信號走到模擬地線區域時,就會產生地平面回流噪聲。同樣電源層也可能會被分割為2.5V,3.3V,5V等。所以在多電壓PCB設計中,地電平面的反彈噪聲和回流噪聲需要特別關心。
6.時域Time Domain和頻域Frequency Domain
時域(time domain)是以時間為基準的電壓或電流的變化的過程,可以用示波器觀察到。它通常用于找出管腳到管腳的延時(delays)、偏移(skew)、過沖(overshoot)、、下沖(undershoot)以及建立時間(settling times)。
頻域(frequency domain)是以頻率為基準的電壓或電流的變化的過程,可以用頻譜分析儀觀察到。它通常用于波形與FCC和其它EMI控制限制之間的比較。
7.阻抗Impedance
阻抗是傳輸線上輸入電壓對輸入電流的比率值(Z0=V/I)。當一個源送出一個信號到線上,它將阻礙它驅動,直到2*TD時,源并沒有看到它的改變,在這里TD是線的延時(delay)。
8.建立時間Settling Time
建立時間就是對于一個振蕩的信號穩定到指定的最終值所需要的時間。
9.管腳到管腳Pin-To-Pin的延時Delay
管腳到管腳延時是指在驅動器端狀態的改變到接收器端狀態的改變之間的時間。這些改變通常發生在給定電壓的50%,最小延時發生在當輸出第一個越過給定的閾值(threshold),最大延時發生在當輸出最后一個越過電壓閾值(threshold) ,測量所有這些情況。
10.偏移Skew
信號的偏移是對于同一個網絡到達不同的接收器端之間的時間偏差。偏移還被用于在邏輯門上時鐘和數據達到的時間偏差。
11.斜率Slew Rate
Slew rate就是邊沿斜率(一個信號的電壓有關的時間改變的比率)。I/O 的技術規范 (如PCI)狀態在兩個電壓之間,這就是斜率(slew rate),它是可以測量的。
12.靜態線Quiescent Line
在當前的時鐘周期內它不出現切換。另外也被稱為 “stuck-at” 線或static線。串擾(Crosstalk)能夠引起一個靜態線在時鐘周期內出現切換。
13.假時鐘False Clocking
假時鐘是指時鐘越過閾值(threshold)無意識地改變了狀態(有時在VIL 或VIH之間)。通常由于過分的下沖(undershoot)或串擾(crosstalk)引起。
14.IBIS模型
IBIS(Input/Output Buffer Information Specification)模型是一種基于V/I曲線的對I/O BUFFER快速準 確建模的方法,是反映芯片驅動和接收電氣特性的一種國際標準,它提供一種標準的文件格式來記錄如驅動源輸出阻抗、上升/下降時間及輸入負載等參數,非常適合做振蕩和串擾等高頻效應的計算與仿真。
八、TTL電平和CMOS電平
1,TTL電平:
工作電壓:通常為5V。
高電平:輸出高電平通常大于2.4V,輸入高電平大于2.0V。
低電平:輸出低電平通常小于0.4V,輸入低電平小于0.8V。
特點:TTL電路速度快,傳輸延遲時間短(5-10ns),但功耗較大。
2,CMOS電平
工作電壓:范圍較廣,通常在3V到15V之間。
高電平:輸出高電平接近電源電壓(Vcc),輸入高電平大于0.7*Vcc。
低電平:輸出低電平接近0V,輸入低電平小于0.3*Vcc。
特點:CMOS電路功耗低,靜態功耗幾乎為零,但速度較慢,傳輸延遲時間長(25-50ns)。
3,TTL和COMS電路比較
電壓范圍:TTL電平固定在5V,而CMOS電平范圍更廣。
噪聲容限:CMOS電平的噪聲容限更大,抗干擾能力更強。
功耗:TTL電路功耗較大,CMOS電路功耗較低。
速度:TTL電路速度快,CMOS電路速度相對較慢
4、COMS電路的使用注意事項
1)COMS電路時電壓控制器件,它的輸入總抗很大,對干擾信號的捕捉能力很強。所以,不用的管腳不要懸空,要接上拉電阻或者下拉電阻,給它一個恒定的電平。
2)輸入端接低內阻的信號源時,要在輸入端和信號源之間要串聯限流電阻,使輸入的電流限制在1mA之內。
3)當接長信號傳輸線時,在COMS電路端接匹配電阻。
4)當輸入端接大電容時,應該在輸入端和電容間接保護電阻。電阻值為R=V0/1mA.V0是外界電容上的電壓。
5)COMS的輸入電流超過1mA,就有可能燒壞COMS。
九、DFX分析方法
1,DFX分析概述
DFX是Design for X (面向產品生命周期各環節的設計)的縮寫,其中X代表產品生命周期的某一環節或特性,主要包括:
可制造性設計DFM——Design forManufacturability;
可裝配性設計 DFA------Design for Assembly;
可靠性設計 DFR------Designfor Reliability;
可服務性設計 DFS Design for Serviceability;
可測試性設計 DFT Designfor Test;
面向環保的設計 DFE------Design for Environment 等。
附錄一 LDO使用之熱阻考慮
1.LDO電源芯片的選型一
在通常的LDO設計中,熱阻參數的考慮常常被忽略。但是,該參數對電源系統的影響卻是很大的,因為LDO的該參數若是選擇不當,就容易造成LDO芯片功耗過大、過熱而進入熱保護狀態,導致電源斷電。
最近在一個系統的電源芯片的選型中(系統輸入為3.3V,需要得到1.8V的電壓,該1.8V所需最大電流250mA左右),為了減小紋波對系統性能的影響,考慮用LDO來進行電壓轉換,最初選擇了Sipex一個LDO(SP6205EM5-ADJ,SOT-23-5)。
該芯片的主要參數為:2.7V~5.5V的電壓輸入范圍;500mA電流輸出;輸出電壓可調;具有限流和熱保護功能等。
咋一看,該電源芯片可滿足系統需求,250mA的所需電流用500mA也是余量足夠了。但與同事討論,其說該芯片根本達不到500mA的輸出電流,因為其熱阻較高。于是,我開始詳細的閱讀該芯片Datasheet,發現其確實存在該問題。
以下討論都是以該芯片的SOT-23-5封裝為例說明。
Thermal Resistance:SOT-23-5(QJA):191 ℃/W
DFN-8(QJA):59 ℃/W
最大功率消耗為:PD(max) = (TJ(max)-TA)/ θJA,其中,TJ為節點溫度,TA為環境溫度,θJA為熱阻。
當芯片超過了最大允許功耗時,節點溫度會過高,從而芯片進入熱保護模式。
SP6205-ADJ(SOT-23-5封裝)的最大功耗為:
PD(max) = ( 125℃ – 25℃ ) / (191 ℃/W) = 523 mW
實際工作過程中,芯片功耗為:
PD = ( Vin – Vout)*Iout + Vin * IGND
通常,IGND為uA級(比如:SP6205在500mA輸出時的IGND=0.35mA),若要求不是特別精確,基本可忽略Vin*IGND該項的影響。
因此,芯片實際工作時的功耗必須限制在最大允許功耗范圍內,超過PD(max)則芯片進入熱保護模式。
根據式(1),我們就可以算出以下參數:
(a)在已知輸入輸出壓差的條件下,得出最大輸出電流
例如:輸入電壓5V,輸出電壓3V,則:
523mW = (5V – 3V)*I(load(max)) + 5V * 0.35mA,
則 I(load(max)) = 260.6mA。
(b)在已知負載電流的條件下,得出輸入輸出允許最大壓差
例如:輸出電壓為3V,負載電流為400mA,則:
523mW = (Vin – 3V)* 400mA + Vin * 0.35mA,
則 Vin(max) = 4.3V,△Vmax=1.3V。
所以,在LDO電源芯片選型的過程中,應該根據實際情況的需求,認真考慮其熱阻參數。
回到本文開頭說提到的系統需求,計算得到的實際最大輸出電流為:I(load(max)) = 347mA。與芯片500mA的輸出電流相比,電流余量大大降低了。而且,該電流最大值是在環境溫度25℃理想情況下計算得到的,隨著工作時間的推移,芯片的溫度會逐漸升高,該輸出電流的最大值還會進一步降低。其500mA的輸出電流只有在輸入輸出壓差1V以內、室溫25℃的情況下才可以得到。
從以上分析可見,LDO的熱阻參數對其它參數(如輸出電流、輸入輸出壓差等)是有較大影響的,必須予以考慮。選型時應盡量選擇熱阻小的芯片或封裝,尤其是同一型號芯片的不同封裝,其熱阻會相差較大,比如以上電源芯片SP6205的DFN-8封裝,其熱阻就只有59℃/W,較之SOT-23-5封裝的191℃/W小了不少。
2.LDO電源芯片的選型二
LDO芯片的主要有:輸出電壓、最大輸出電流、輸入輸出電壓差、 負載調整率、線性調整率、電源抑制比PSRR。在芯片選型時這些都需要進行對比擇優而選之,
例:現有一個輸出1.2V,負載電流為0.4A的應用,有兩個芯片作為備選方案:ADM7171和AMS1117-1.2。主要參數對比如文章最后表格,可以看出二者各有優劣。
下面我們根據最重要的一條來決定兩個芯片誰更適合本應用設計----最高工作溫度下的芯片晶元結溫。
一般LDO電源芯片功耗Pd = [(Vin–Vout)*Iload]+( Vin*Ignd),其中Vin為芯片電源輸入電壓、Vout為芯片輸出電壓、Iload為負載電流、Ignd為接地電流,通常Ignd可忽略不計。Pd = (Vin–Vout)*Iload。
查找手冊確定芯片的熱阻,ADM7171如圖4,AMS1117-1.2如圖5。
圖4 ADM7171 熱阻
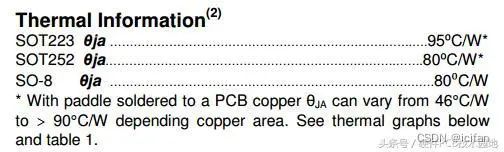
圖5-1 AMS1117熱阻
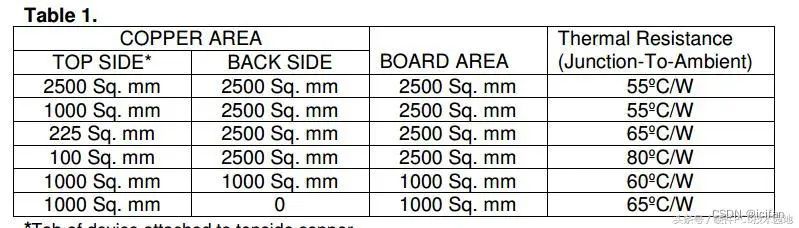
圖5-2 AMS1117熱阻表
根據table1,按最低55℃/W計算。
LDO芯片晶元結溫計算公式為:Tj=Ta+(Pd*θja),其中Tj:晶元結溫,Ta:環境溫度,θja:芯片熱阻。假設系統電源為3.3V,這里按工業產品最高工作85℃。根據芯片功耗及熱阻,計算在最高溫度時芯片晶元結溫:
ADM7171:Tj=85℃+(0.84W*36℃/W)=115℃,與最大工作結溫相差10℃。
AMS1117:Tj=85℃+(0.84W*55℃/W)=136℃,超過最大工作結溫11℃。
顯然ADM7171更能滿足高溫工作的性能。
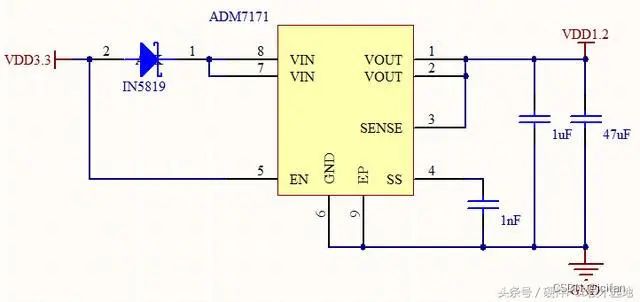
(2)LDO電源芯片電路設計
雖然ADM7171是較為合適的選擇,但結溫降額只有10℃,從長期工作可靠性角度來講還是有些不滿足要求。在系統電源為3.3V的情況下,可以在ADM7171的電源輸入串入一個二極管,如圖6,使Pd = [(Vin–Vout)*Iload]中的Vin–Vout差值進一步降低。
圖6 最終電路圖
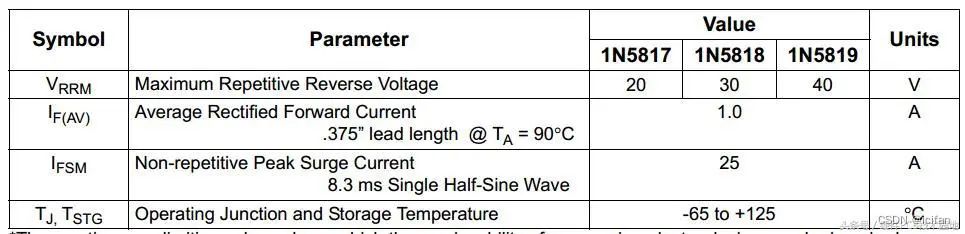
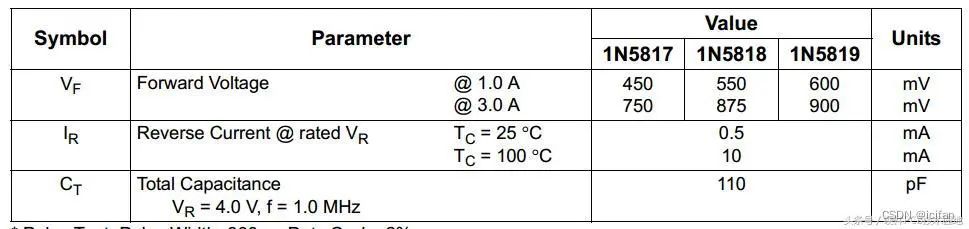
圖7為1N5819二極管手冊。正向壓降為0.55V,此時Tj=85℃+((3.3-0.55-1.2)0.4*36℃/W)=(0.62W*36℃/W)=107℃。此時二極管通過電流為I= (Po+Pd)/Uin=(1.2*0.4+0.62)/(3.3-0.55)=0.4A為1N5819正向導通電流的一半,符合工業產品降額要求。
圖7-1 二極管正向電流
圖7-2 二極管正向壓降






-
ldo
+關注
關注
35文章
1919瀏覽量
153188 -
晶振
+關注
關注
34文章
2834瀏覽量
67919 -
DC-DC
+關注
關注
30文章
1931瀏覽量
81496
原文標題:硬件工程師面試基礎知識點
文章出處:【微信號:fcsde-sh,微信公眾號:fcsde-sh】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
PCB布線知識面試題_PCB工程師必備

TCP協議面試常問知識點總結






 工商網監
工商網監
評論