") 以太網(wǎng)IO控制卡:C#實(shí)時(shí)讀寫時(shí)間測(cè)試
以太網(wǎng)IO控制卡:C#實(shí)時(shí)讀寫時(shí)間測(cè)試
本文導(dǎo)讀
今天,正運(yùn)動(dòng)小助手給大家分享一下 運(yùn)動(dòng)控制卡之ECI 0系列IO板卡的用法,并測(cè)試一下多個(gè)IO讀寫的速度。ECI其他系列IO板卡的輸入輸出使用也類似,讀寫速度也類似,可以供參考。
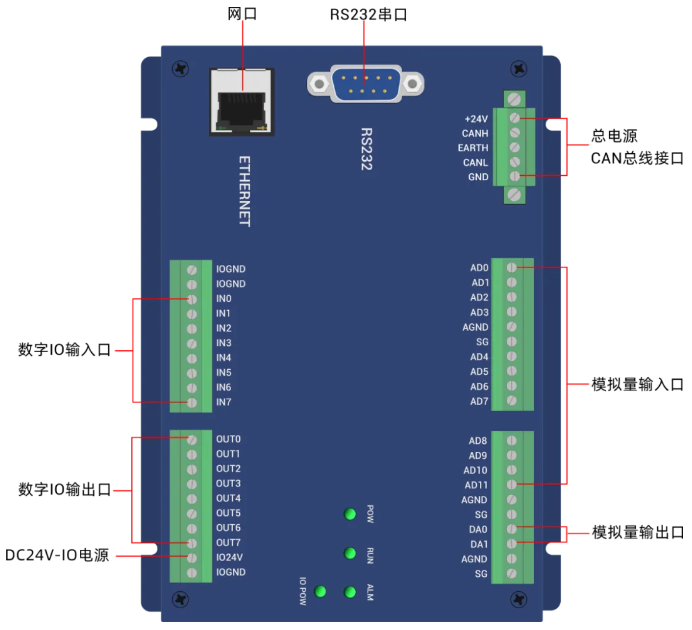
一、ECI0032/ECI0064 IO卡硬件介紹
ECI0032/ECI0064等ECI 0系列運(yùn)動(dòng)控制卡支持以太網(wǎng),RS232通訊接口和電腦相連,接收電腦的指令運(yùn)行,支持ZCAN擴(kuò)展,可擴(kuò)展128路AD,64路DA;272路輸入和272路輸出。
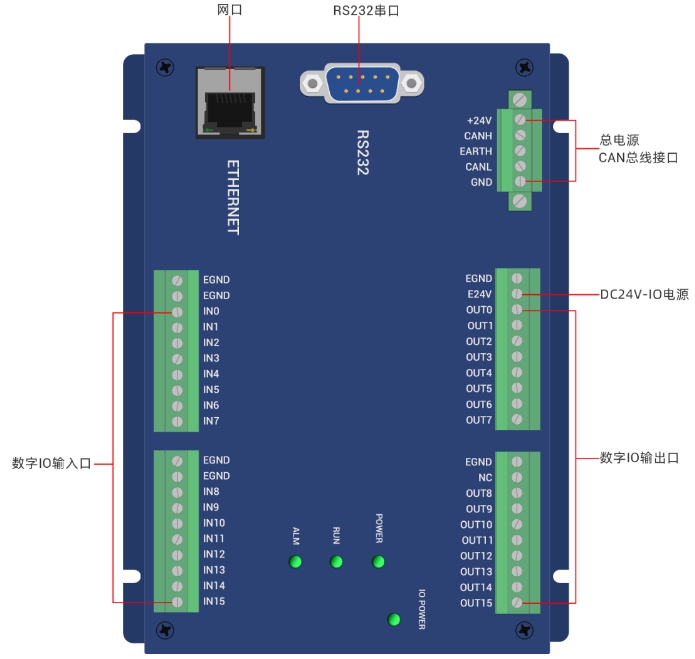
ECI0032 IO控制卡
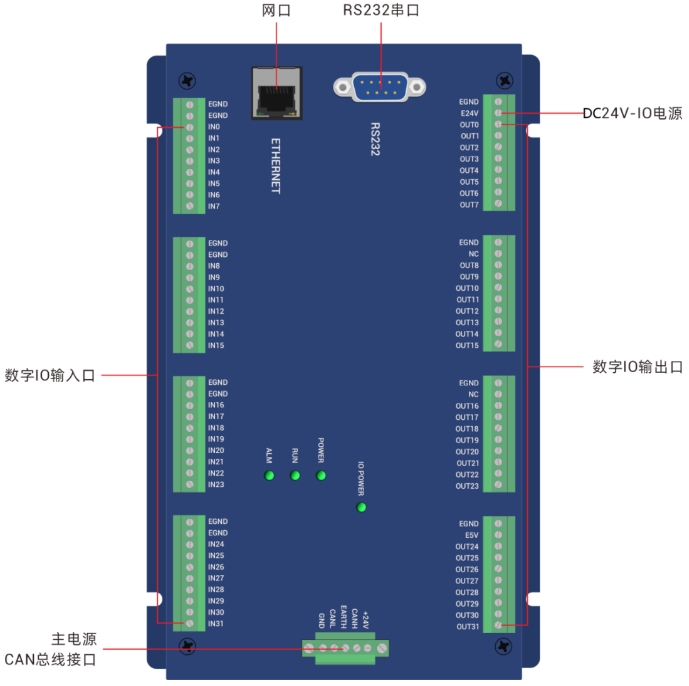
ECI0064 IO控制卡
ECI0032/ECI0064等ECI 0系列運(yùn)動(dòng)控制卡采用了優(yōu)化的網(wǎng)絡(luò)通訊協(xié)議可以實(shí)現(xiàn)實(shí)時(shí)的邏輯控制和IO狀態(tài)的監(jiān)控。
ECI0032/ECI0064等ECI 0系列IO卡的應(yīng)用程序可以使用VC、VB、VS、C++、C#等軟件開(kāi)發(fā),程序運(yùn)行時(shí)需要?jiǎng)討B(tài)庫(kù)zmotion.dll,調(diào)試時(shí)可以將RTSys軟件同時(shí)連接控制器,從而方便調(diào)試、方便觀察。

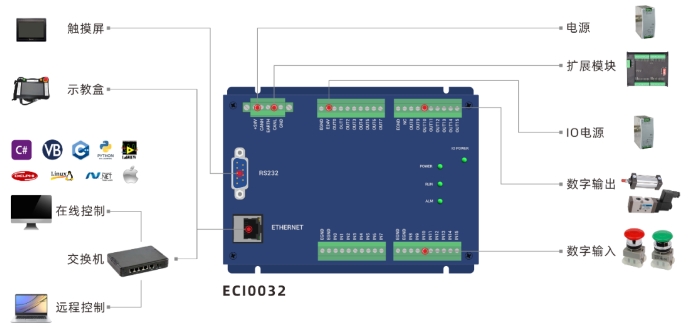
ECI0032典型連接配置圖:
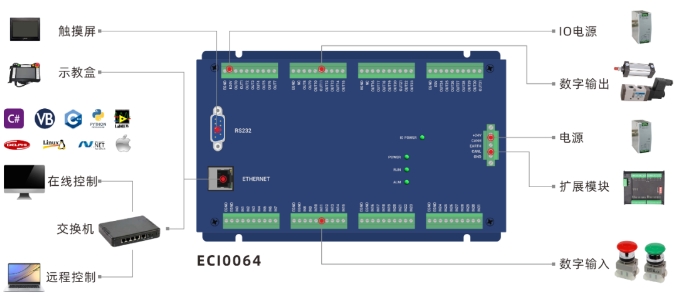
ECI0064典型連接配置圖:
二、IO接口介紹
1. IO電源注意事項(xiàng)
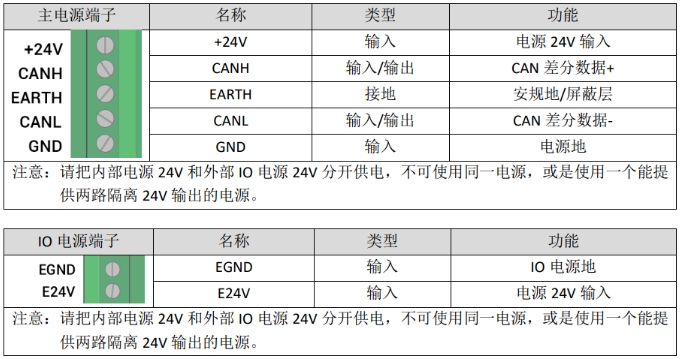
ECI0032/ECI0064和其他控制卡不一樣,它正常工作需要兩個(gè)電源同時(shí)供電(內(nèi)部電源、IO電源)。
值得注意的是:給內(nèi)部電源和IO電源供電的電源推薦使用2個(gè)獨(dú)立的24V電源,防止IO電路上的干擾直接通過(guò)電源傳輸?shù)娇刂瓶ǖ膬?nèi)部電路上影響控制卡的正常工作。
2.輸入口功能介紹
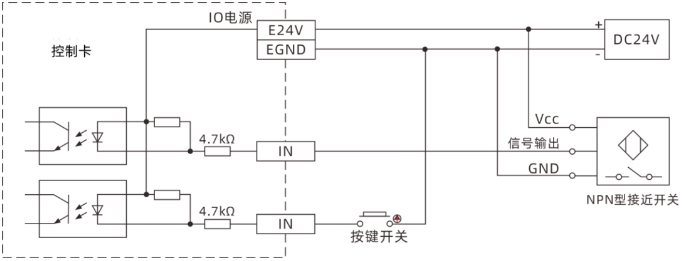
通用輸入口接線圖參考
通用輸入口的硬件規(guī)格
通過(guò)硬件參數(shù)我們發(fā)現(xiàn)通用輸入口的輸入方式是NPN漏型信號(hào),所以在IO傳感器的選擇上大家要注意選擇NPN類型的傳感器。ZMC系列及ECI其他系列等產(chǎn)品的輸入也類似,詳見(jiàn)對(duì)應(yīng)產(chǎn)品的硬件手冊(cè)。
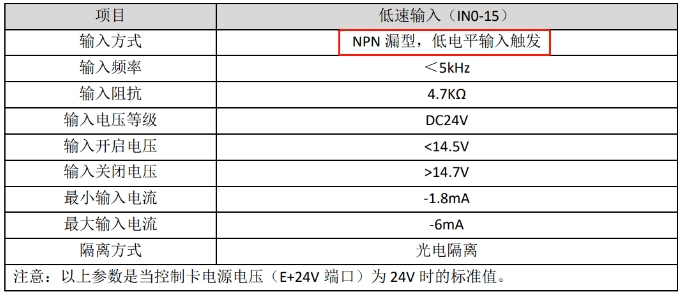
如何驗(yàn)證控制卡輸入口硬件功能是否正常 ?
根據(jù)上圖的輸入口等效電路圖分析: 當(dāng)輸入口和EGND導(dǎo)通的時(shí)候輸入口就可以捕獲到信號(hào)。那么我們可以準(zhǔn)備一根導(dǎo)線,導(dǎo)線的一段接IO電源的地(EGND),導(dǎo)線的另外一端去不停的觸碰對(duì)應(yīng)輸入口的端子。同時(shí)打開(kāi)RTSys/ZDevelop軟件連接控制卡后打開(kāi)輸入口監(jiān)控界面去觀察對(duì)應(yīng)的輸入口狀態(tài)是否會(huì)根據(jù)觸碰的情況而變化,如果對(duì)應(yīng)輸入口和EGND導(dǎo)通對(duì)應(yīng)輸入口狀態(tài)就顯示綠燈,輸入口和EGND不導(dǎo)通對(duì)應(yīng)的輸入口狀態(tài)就顯示紅燈,那么輸入口的硬件就是正常的。
RTSys輸入口監(jiān)控界面
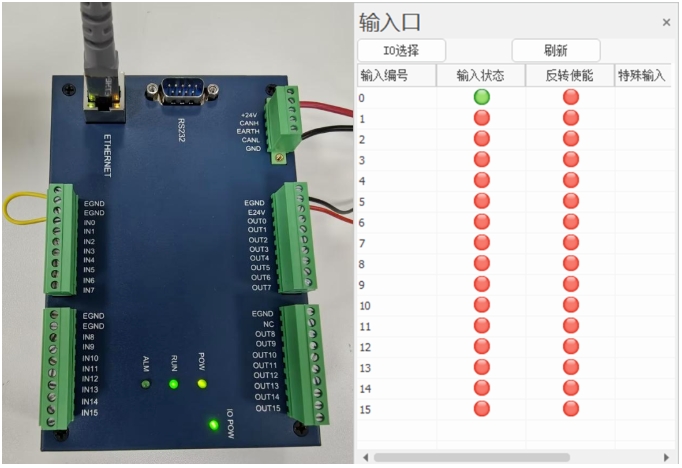
輸入口0(IN0)與EGND導(dǎo)通的輸入口視圖
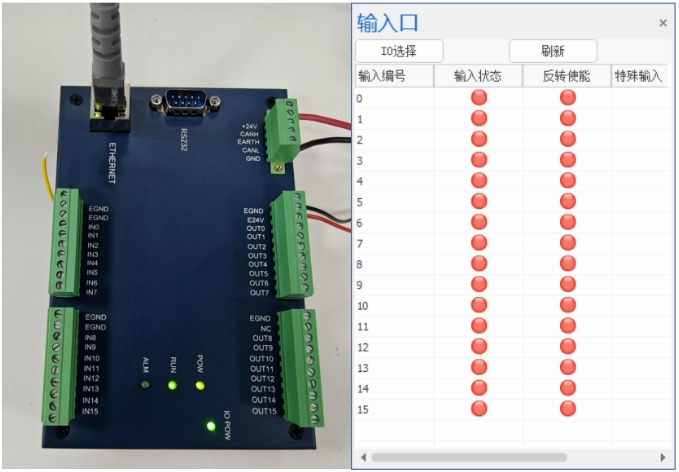
輸入口0(IN0)與EGND不導(dǎo)通的輸入口視圖
3.輸出口功能介紹
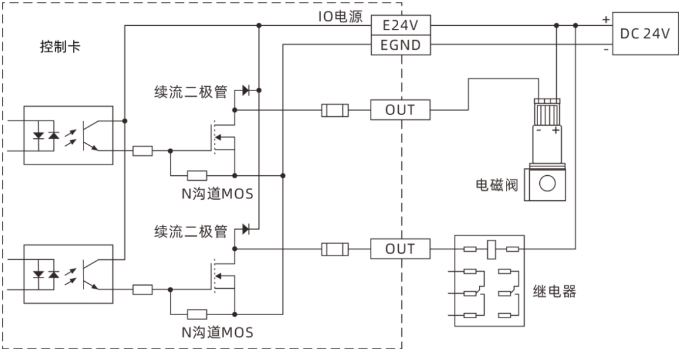
通用輸出口接線圖參考
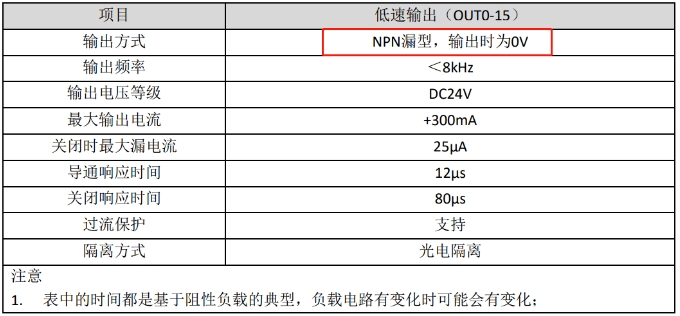
通用輸出口的硬件規(guī)格
通過(guò)硬件參數(shù)我們發(fā)現(xiàn)通用輸出口的輸出方式是NPN漏型信號(hào),所以輸出口輸出的時(shí)候是一個(gè)0V的信號(hào),也就是和EGND導(dǎo)通的信號(hào)。ZMC系列及ECI其他系列等產(chǎn)品的輸出也類似,詳見(jiàn)對(duì)應(yīng)產(chǎn)品的硬件手冊(cè)。
如何驗(yàn)證控制卡輸出口硬件功能是否正常 ?
根據(jù)上圖的輸出口等效電路圖分析: 當(dāng)輸出口輸出時(shí),OUT口是和EGND導(dǎo)通的。雖然輸出的時(shí)候輸出口的電壓也是0V但輸出口沒(méi)有輸出的時(shí)候,輸出口的狀態(tài)是一個(gè)高阻態(tài)的狀態(tài)。所以驗(yàn)證輸出口的功能是不推薦使用萬(wàn)用表的電壓檔去測(cè)試,而是通過(guò)萬(wàn)用表的導(dǎo)通檔去打?qū)y(cè)試輸出口的功能是否正常。 (萬(wàn)用表打到導(dǎo)通檔,如果是紅黑表筆之間是導(dǎo)通的,那么萬(wàn)用表會(huì)發(fā)出滴滴的聲音。不同的萬(wàn)用表的叫聲不同,大家可以把萬(wàn)用表打到導(dǎo)通檔后短接紅黑表筆聽(tīng)聽(tīng)聲音就知道你的萬(wàn)用表是什么音色了)

萬(wàn)用表導(dǎo)通檔檔位圖
這樣的話我們可以打開(kāi)RTSys/ZDevelop軟件連接控制器后打開(kāi)輸出口監(jiān)控界面,在輸出口監(jiān)控界面去操作對(duì)應(yīng)的輸出口開(kāi)關(guān),同時(shí)把萬(wàn)用表打到導(dǎo)通檔,然后萬(wàn)用表的紅表筆觸碰對(duì)應(yīng)輸出口的接線端子,黑表筆觸碰IO電源的地EGND。
觀察當(dāng)RTSys軟件打開(kāi)輸出口的時(shí)候萬(wàn)用表是否是導(dǎo)通的(萬(wàn)用表是否有滴滴聲),關(guān)閉輸出口的時(shí)候萬(wàn)用表是否是未導(dǎo)通狀態(tài)(萬(wàn)用表是否有滴滴聲),如果是那么輸出口的硬件是正常的。
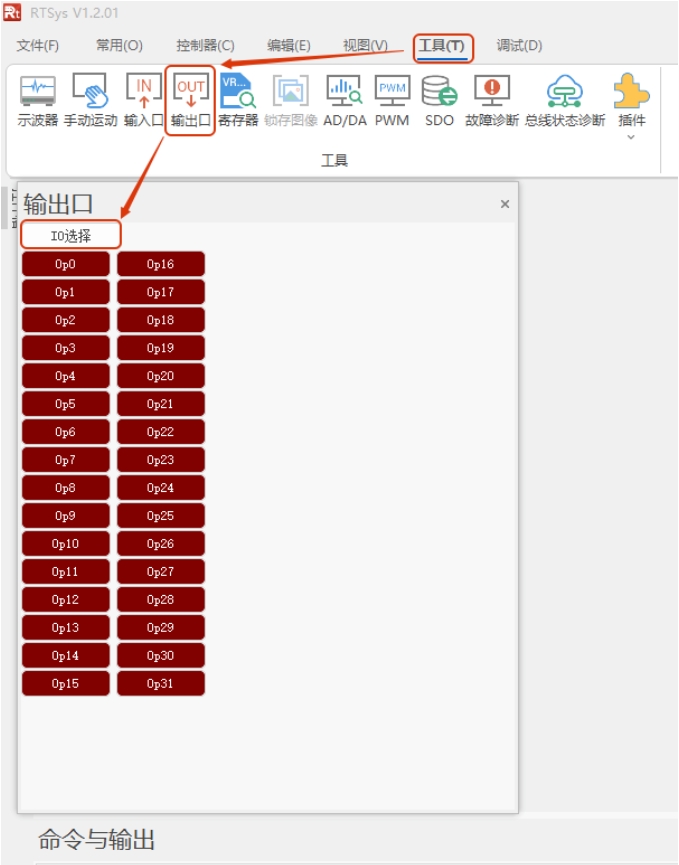
RTSys輸出口監(jiān)控界面
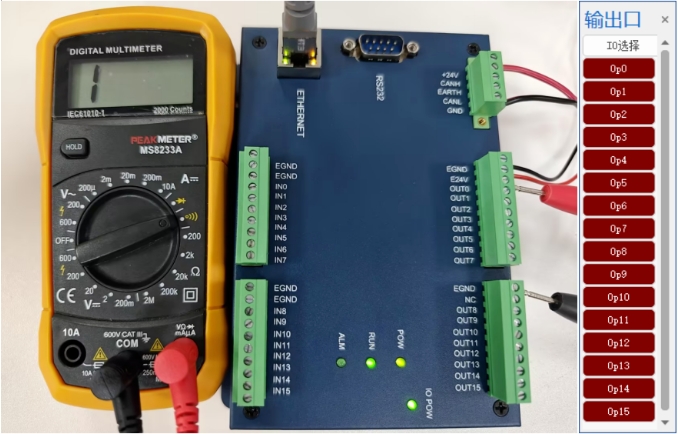
輸出口0(OP0)未輸出的萬(wàn)用表導(dǎo)通檔測(cè)試情況
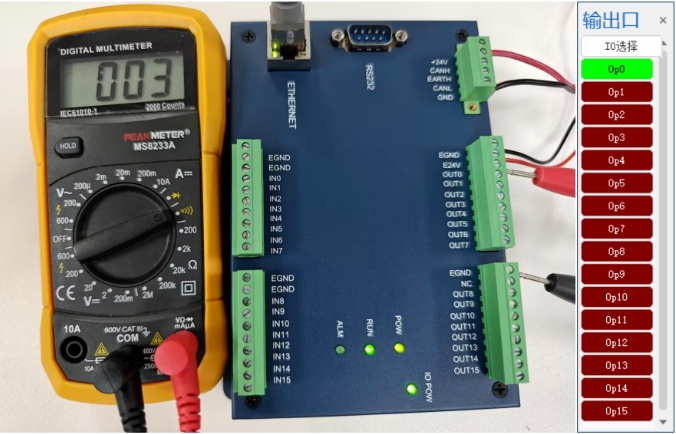
輸出口0(OP0)輸出時(shí)的萬(wàn)用表導(dǎo)通檔測(cè)試情況
演示視頻可點(diǎn)擊→以太網(wǎng)IO控制卡:C#實(shí)時(shí)讀寫時(shí)間測(cè)試查看。
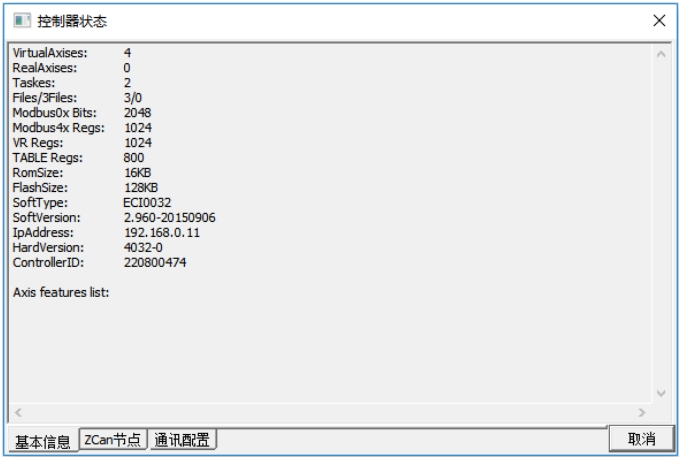
4.控制器基本信息
三、C#語(yǔ)言進(jìn)行ECIO板卡的開(kāi)發(fā)
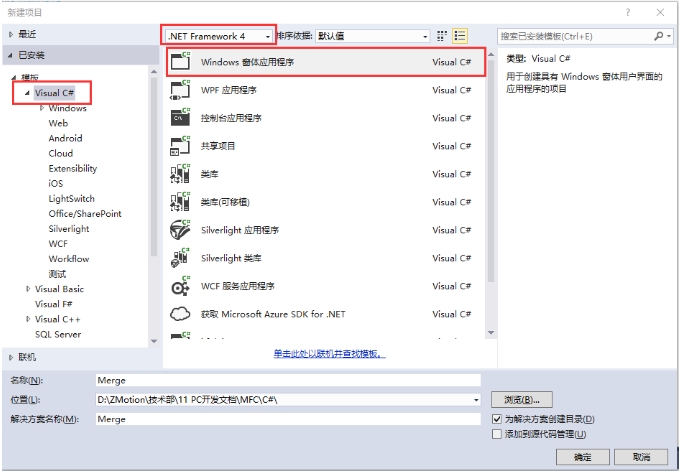
1.在VS2015菜單“文件”→“新建”→ “項(xiàng)目”,啟動(dòng)創(chuàng)建項(xiàng)目向?qū)А?/p>

2.選擇開(kāi)發(fā)語(yǔ)言為“Visual C#”和.NET Framework 4以及Windows窗體應(yīng)用程序。
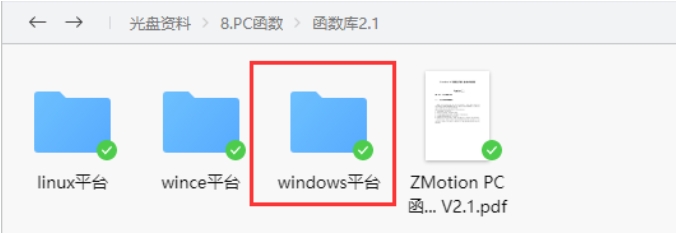
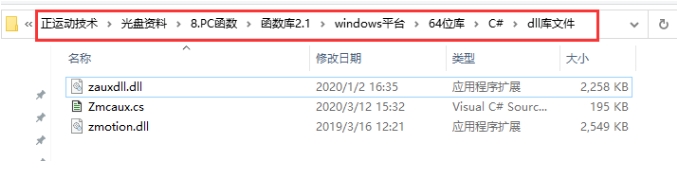
3.找到廠家提供的光盤資料里面的C#函數(shù)庫(kù),路徑如下(64位庫(kù)為例)。
A、進(jìn)入廠商提供的光盤資料找到“8.PC函數(shù)”文件夾,并點(diǎn)擊進(jìn)入。

B、選擇“函數(shù)庫(kù)2.1”文件夾。

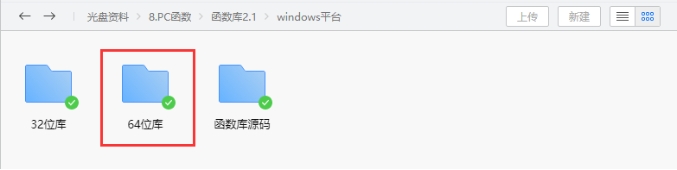
C、選擇“Windows平臺(tái)”文件夾。
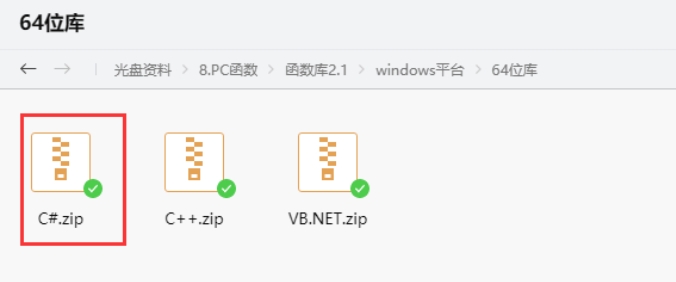
D、根據(jù)需要選擇對(duì)應(yīng)的函數(shù)庫(kù)這里選擇64位庫(kù)。
E、解壓C#的壓縮包,里面有C#對(duì)應(yīng)的函數(shù)庫(kù)。
F、函數(shù)庫(kù)具體路徑如下。
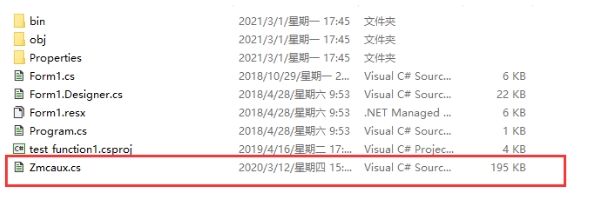
4.將廠商提供的C#的庫(kù)文件以及相關(guān)文件復(fù)制到新建的項(xiàng)目中。
A、將zmcaux.cs文件復(fù)制到新建的項(xiàng)目里面中。
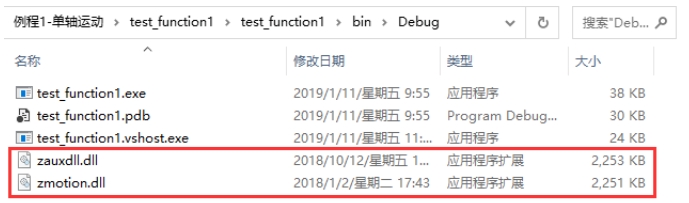
B、將zaux.dll和zmotion.dll文件放入bindebug文件夾中。
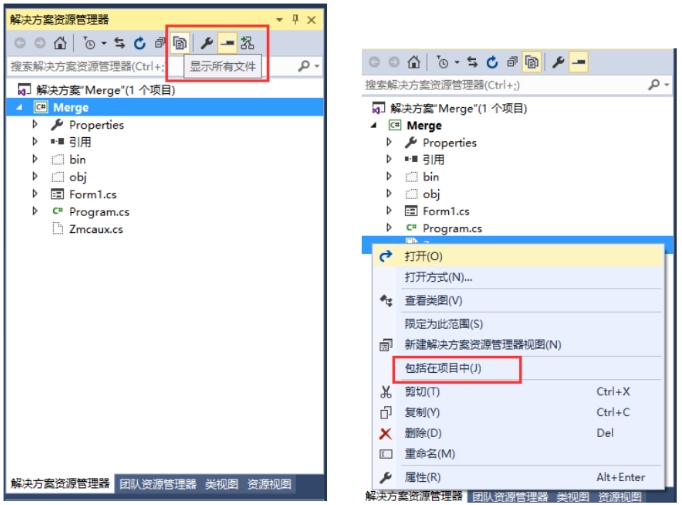
5.用vs打開(kāi)新建的項(xiàng)目文件,在右邊的解決方案資源管理器中點(diǎn)擊顯示所有,然后鼠標(biāo)右鍵點(diǎn)擊zmcaux.cs文件,點(diǎn)擊包括在項(xiàng)目中。
6.雙擊Form1.cs里面的Form1,出現(xiàn)代碼編輯界面,在文件開(kāi)頭寫入 using cszmcaux,并聲明控制器句柄g_handle。
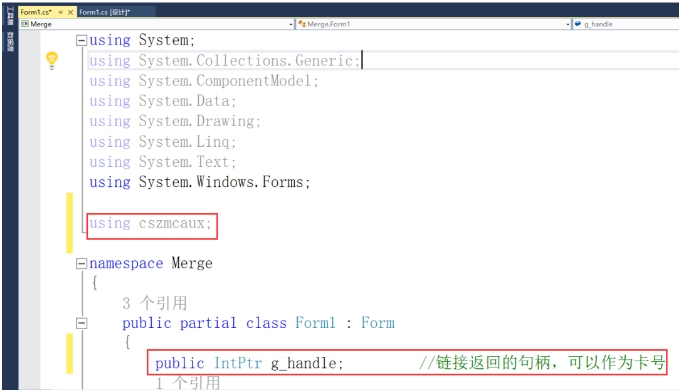
7.至此項(xiàng)目新建完成,可進(jìn)行C#項(xiàng)目開(kāi)發(fā)。
四、PC函數(shù)介紹
1.PC函數(shù)手冊(cè)也在光盤資料里面,具體路徑如下。

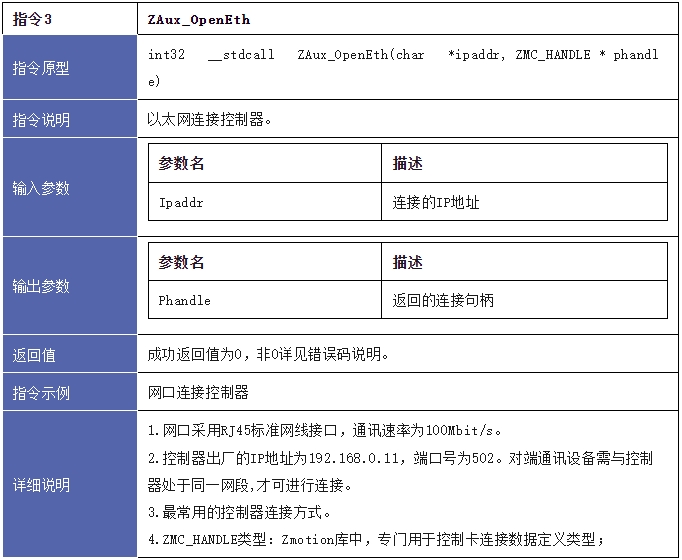
2.鏈接控制器,獲取鏈接句柄。
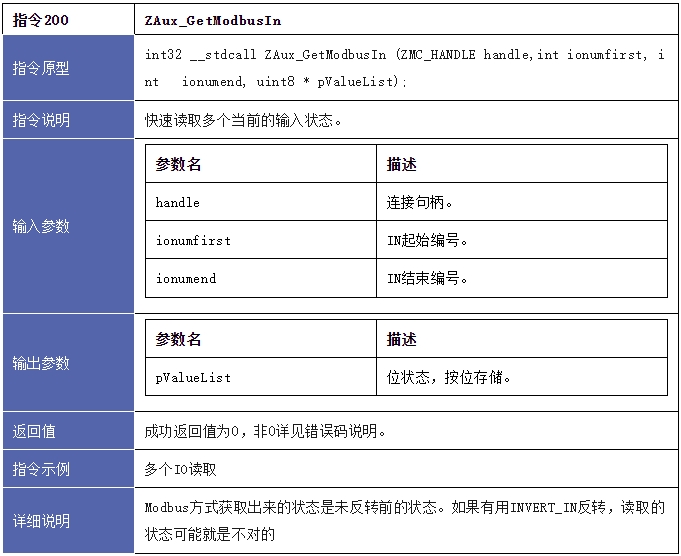
3.快速讀取多個(gè)輸入口當(dāng)前狀態(tài)接口說(shuō)明。
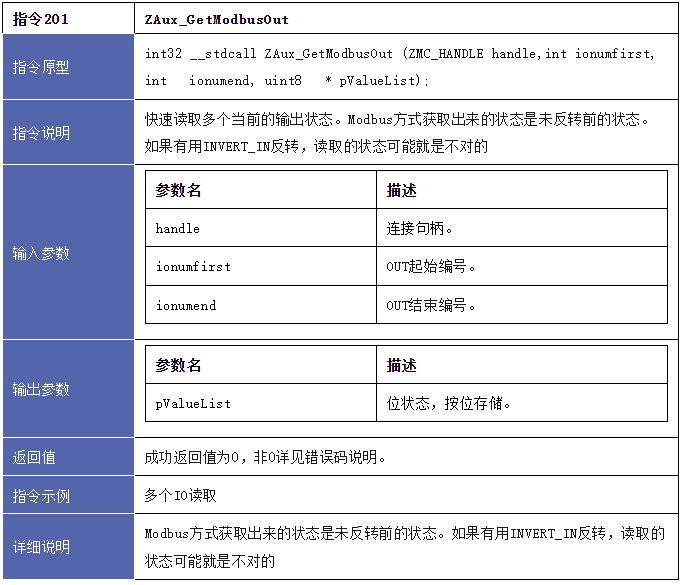
4.快速讀取多個(gè)輸出口當(dāng)前狀態(tài)接口說(shuō)明。
五、C#快速讀取多個(gè)IO狀態(tài)的測(cè)試?yán)?/p>
1. 例程界面如下
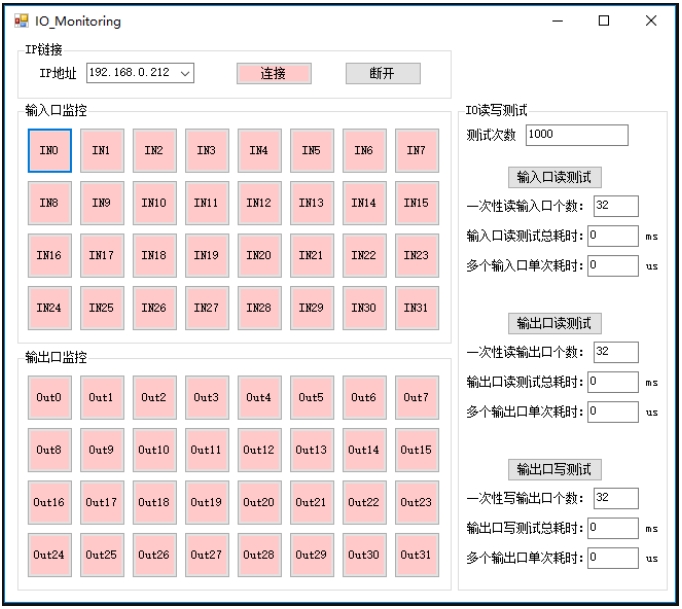
2.鏈接按鈕的事件處理函數(shù)中調(diào)用鏈接控制器的接口函數(shù)ZAux_OpenEth(),與控制器進(jìn)行鏈接,鏈接成功后啟動(dòng)定時(shí)器1監(jiān)控控制器的IO狀態(tài)。
//鏈接控制器
privatevoidLinkButton_Click(objectsender,EventArgse)
{
zmcaux.ZAux_OpenEth(IP_comboBox.Text,outg_handle);
if(g_handle!=(IntPtr)0)
{
//MessageBox.Show("控制器鏈接成功!","提示");
timer1.Enabled=true;
LinkButton.BackColor=Color.FromArgb(200,255,200);
}
else
{
MessageBox.Show("控制器鏈接失敗,請(qǐng)檢測(cè)IP地址!","警告");
LinkButton.BackColor=Color.FromArgb(255,200,200);
}
}
3.通過(guò)定時(shí)器1監(jiān)控控制器的IO狀態(tài)。
//定時(shí)器更新IO信息 privatevoidtimer1_Tick(objectsender,EventArgse) { intj,k; intTestNum=50; //快速讀取輸入口狀態(tài)接口時(shí)間測(cè)試 byte[]InState=newbyte[4]; DateTimebeforeDT=System.DateTime.Now; for(intcount=0;count>k)&1)==1) { InStatus[i].BackColor=Color.FromArgb(200,255,200); } else { InStatus[i].BackColor=Color.FromArgb(255,200,200); } } } DateTimeafterDT=System.DateTime.Now; //計(jì)算beforeDT與afterDT的時(shí)間差 TimeSpants=afterDT-beforeDT; InMoitoring.Text="輸入口監(jiān)控_刷新時(shí)間:"+(ts.TotalMilliseconds*1000/TestNum).ToString()+"us"; //快速讀取輸出口狀態(tài)接口時(shí)間測(cè)試 byte[]OutState=newbyte[4]; DateTimebeforeDTOP=System.DateTime.Now; for(intcount=0;count>k)&1)==1) { OutStatus[i].BackColor=Color.FromArgb(200,255,200); } else { OutStatus[i].BackColor=Color.FromArgb(255,200,200); } } } DateTimeafterDTOP=System.DateTime.Now; //計(jì)算beforeDTOP與afterDTOP的時(shí)間差 ts=afterDTOP-beforeDTOP; OutMoitoring.Text="輸出口監(jiān)控_刷新時(shí)間:"+(ts.TotalMilliseconds*1000/TestNum).ToString()+"us"; }
4.多個(gè)輸入口狀態(tài)讀取速度測(cè)試函數(shù)如下。
//多個(gè)輸入口狀態(tài)讀取交互速度測(cè)試 privatevoidReadInTest_Click(objectsender,EventArgse) { intj,k; inttestNum=Convert.ToInt32(TestNum.Text.ToString()); intreadInNum=Convert.ToInt32(ReadInNum.Text.ToString()); //快速讀取輸入口狀態(tài)接口時(shí)間測(cè)試 byte[]InState=newbyte[4]; DateTimebeforeDT=System.DateTime.Now; for(intcount=0;count>k)&1)==1) { InStatus[i].BackColor=Color.FromArgb(200,255,200); } else { InStatus[i].BackColor=Color.FromArgb(255,200,200); } } } } DateTimeafterDT=System.DateTime.Now; //計(jì)算beforeDT與afterDT的時(shí)間差 TimeSpants=afterDT-beforeDT; //總耗時(shí)ms ReadInTotTime.Text=ts.TotalMilliseconds.ToString("0.00"); //平均耗時(shí)us ReadInTime.Text=(ts.TotalMilliseconds*1000/testNum).ToString("0.00"); }
5.多個(gè)輸出口狀態(tài)讀取速度測(cè)試函數(shù)如下。
//多個(gè)輸出口狀態(tài)讀取交互速度測(cè)試
privatevoidReadOutTest_Click(objectsender,EventArgse)
{
intj,k;
inttestNum=Convert.ToInt32(TestNum.Text.ToString());
intreadOutNum=Convert.ToInt32(ReadOutNum.Text.ToString());
//快速讀取輸入口狀態(tài)接口時(shí)間測(cè)試
byte[]OutState=newbyte[4];
DateTimebeforeDT=System.DateTime.Now;
for(intcount=0;count>k)&1)==1)
{
OutStatus[i].BackColor=Color.FromArgb(200,255,200);
}
else
{
OutStatus[i].BackColor=Color.FromArgb(255,200,200);
}
}
}
}
DateTimeafterDT=System.DateTime.Now;
//計(jì)算beforeDT與afterDT的時(shí)間差
TimeSpants=afterDT-beforeDT;
//總耗時(shí)ms
ReadOutTolTime.Text=ts.TotalMilliseconds.ToString("0.00");
//平均耗時(shí)us
ReadOutTime.Text=(ts.TotalMilliseconds*1000/testNum).ToString("0.00");}
6.多個(gè)輸出口狀態(tài)設(shè)置速度測(cè)試函數(shù)如下。
//多個(gè)輸出口狀態(tài)設(shè)置交互速度測(cè)試
privatevoidWriteOutTest_Click(objectsender,EventArgse)
{
inttestNum=Convert.ToInt32(TestNum.Text.ToString());
intwriteOutNum=Convert.ToInt32(WriteOutNum.Text.ToString());
//快速讀取輸入口狀態(tài)接口時(shí)間測(cè)試
byte[]OutState=newbyte[4];
DateTimebeforeDT=System.DateTime.Now;
for(intcount=0;count
7.多個(gè)IO狀態(tài)與上位機(jī)交互速度測(cè)試結(jié)果如下。
(1)32個(gè)輸入輸出口讀寫1000次,交互速度測(cè)試結(jié)果:

(2)32個(gè)輸入輸出口讀寫1W次,交互速度測(cè)試結(jié)果:

(3)32個(gè)輸入輸出口讀寫10W次,交互速度測(cè)試結(jié)果:

六、分析與結(jié)論
以上分別是對(duì)32個(gè)輸入口的讀速度,32個(gè)輸出口的讀速度,32個(gè)輸出口的寫速度進(jìn)行測(cè)試,從上面的運(yùn)行效果圖的數(shù)據(jù)顯示來(lái)看,
無(wú)論是輸入口還是輸出口它們的交互速度都保持在200us左右,并且效果十分穩(wěn)定。
當(dāng)測(cè)試次數(shù)從1000次增加到1W次,甚至10W次,平均每次的交互速度還是保持在200us左右。

完整代碼獲取地址
▼
本次,正運(yùn)動(dòng)技術(shù)以太網(wǎng)IO控制卡:C#實(shí)時(shí)讀寫時(shí)間測(cè)試 ,就分享到這里。
更多精彩內(nèi)容請(qǐng)關(guān)注“ 正運(yùn)動(dòng)小助手 ”公眾號(hào),需要相關(guān)開(kāi)發(fā)環(huán)境與例程代碼,請(qǐng)咨詢正運(yùn)動(dòng)技術(shù)銷售工程師:400-089-8936。
本文由正運(yùn)動(dòng)技術(shù)原創(chuàng),歡迎大家轉(zhuǎn)載,共同學(xué)習(xí),一起提高中國(guó)智能制造水平。文章版權(quán)歸正運(yùn)動(dòng)技術(shù)所有,如有轉(zhuǎn)載請(qǐng)注明文章來(lái)源。
正運(yùn)動(dòng)技術(shù)專注于運(yùn)動(dòng)控制技術(shù)研究和通用運(yùn)動(dòng)控制軟硬件產(chǎn)品的研發(fā),是國(guó)家級(jí)高新技術(shù)企業(yè)。正運(yùn)動(dòng)技術(shù)匯集了來(lái)自華為、中興等公司的優(yōu)秀人才,在堅(jiān)持自主創(chuàng)新的同時(shí),積極聯(lián)合各大高校協(xié)同運(yùn)動(dòng)控制基礎(chǔ)技術(shù)的研究,是國(guó)內(nèi)工控領(lǐng)域發(fā)展最快的企業(yè)之一,也是國(guó)內(nèi)少有、完整掌握運(yùn)動(dòng)控制核心技術(shù)和實(shí)時(shí)工控軟件平臺(tái)技術(shù)的企業(yè)。主要業(yè)務(wù)有:運(yùn)動(dòng)控制卡_運(yùn)動(dòng)控制器_EtherCAT運(yùn)動(dòng)控制卡_EtherCAT控制器_運(yùn)動(dòng)控制系統(tǒng)_視覺(jué)控制器__運(yùn)動(dòng)控制PLC_運(yùn)動(dòng)控制_機(jī)器人控制器_視覺(jué)定位_XPCIe/XPCI系列運(yùn)動(dòng)控制卡等 。
審核編輯 黃宇
-
測(cè)試
+關(guān)注
關(guān)注
8文章
5174瀏覽量
126488 -
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6550瀏覽量
110498 -
以太網(wǎng)
+關(guān)注
關(guān)注
40文章
5385瀏覽量
171160 -
運(yùn)動(dòng)控制卡
+關(guān)注
關(guān)注
7文章
108瀏覽量
15445
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
以太網(wǎng)IO控制卡:C# 實(shí)時(shí)讀寫時(shí)間測(cè)試 #正運(yùn)動(dòng)技術(shù) #運(yùn)動(dòng)控制卡 #正運(yùn)動(dòng) #正運(yùn)動(dòng)控制卡
具有PMIC和汽車以太網(wǎng)的AM263x控制卡

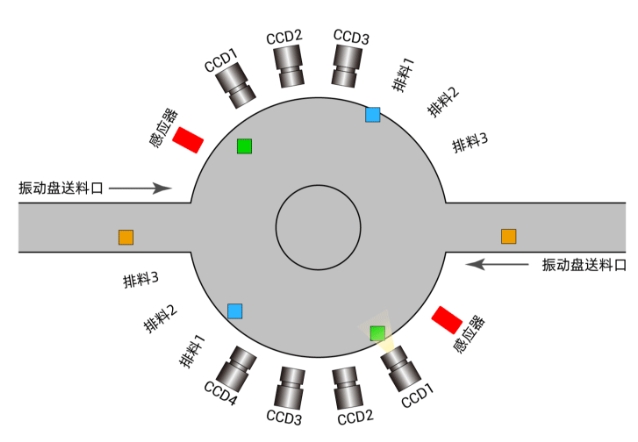
PCIe實(shí)時(shí)運(yùn)動(dòng)控制卡的雙盤視覺(jué)篩選機(jī)上位機(jī)開(kāi)發(fā)應(yīng)用
用于控制邊緣設(shè)備的工業(yè)以太網(wǎng)到IO-link網(wǎng)關(guān)
車載以太網(wǎng)與傳統(tǒng)以太網(wǎng)的區(qū)別

PCIe EtherCAT實(shí)時(shí)運(yùn)動(dòng)控制卡PCIE464的IO與編碼器讀寫應(yīng)用# 正運(yùn)動(dòng)技術(shù)# 運(yùn)動(dòng)控制卡
PCIe EtherCAT實(shí)時(shí)運(yùn)動(dòng)控制卡PCIE464的IO與編碼器讀寫應(yīng)用
運(yùn)動(dòng)控制卡伺服電機(jī)如何控制
什么是工業(yè)以太網(wǎng)?有何特點(diǎn)?
簡(jiǎn)單易用的以太網(wǎng)數(shù)據(jù)采集卡應(yīng)用開(kāi)發(fā)之C#
STM32407以太網(wǎng)一段時(shí)間后不能通訊的原因?怎么解決?
工業(yè)以太網(wǎng)的基本原理及優(yōu)勢(shì)
【正運(yùn)動(dòng)】高速高精,超高實(shí)時(shí)性的PCIe EtherCAT實(shí)時(shí)運(yùn)動(dòng)控制卡 | PCIE464
工業(yè)以太網(wǎng)的特點(diǎn) 工業(yè)以太網(wǎng)的關(guān)鍵技術(shù)包含哪些?
單軸PSO視覺(jué)飛拍與精準(zhǔn)輸出:EtherCAT超高速實(shí)時(shí)運(yùn)動(dòng)控制卡XPCIE1032H上位機(jī)C#開(kāi)發(fā)(七)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論