 基于AT89S8252單片機水文纜道測驗系統的設計和實現
基于AT89S8252單片機水文纜道測驗系統的設計和實現
早期的中小河道水文測驗一般是采用人工操作的水文纜道測驗系統,操作時間長、勞動強度大、主觀誤差大。為此我們對原有的人工測驗系統進行了改造,采用單片機控制替代人工進行自動水文測驗。本文介紹了基于ATMEL89單片機的水文纜道自動測驗系統,系統的設計是構建在原有設施基礎上,而且盡量不改變系統結構并能兼容手動操作方法,自動地完成流量的測驗計算和打印,適用于中小河道的懸索和懸桿兩種類型的水文纜道。
根據水利部頒發的《水文纜道測驗規范》及人工控制水文纜道的結構和測驗要求,單片機控制系統的主要功能有:自動進行河道斷面的面積、平均流速、流量測驗和計算打印;河道斷面任一垂線上水深、水面偏角、河底偏角、垂線平均流速的自動測驗;干繩、濕繩和位移修正;測驗期間水位自動監測等。系統的硬件以單片機為核心以及輸入/輸出接口,存儲器系統和打印顯示電路等部分組成;軟件部分由系統控制、數據采集存儲、誤差修正、流量計算4個主要軟件模塊組成。
下面介紹本系統的原理和設計要點。
1、系統構成
系統框圖如圖1所示。

采用AT89S8252單片機。由于河道測驗的數據量大且運算比較復雜,而單片機內部的存儲器容量有限。故增加外部存儲器RAM6116和 ROM6264。外部信號的輸入采集接口是以多路A/D片ADC0809為核心,將纜道信號和水位信號送到單片機P1口和P3口承擔其他輸入、輸出信號的接口。下面根據水文測驗的特點,介紹主要的接口電路和工作過程。
1.1、ADC0809接口電路
以ADC0809為中心的接口電路如圖2所示。

他將電傳水位計的水位變化信號和纜道送來的流速、偏角、水面水底信號經變換后傳送到單片機。該接口具有電路簡單、穩定可靠、抗干擾強等特點。
1.1.1、水位信號的獲取
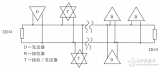
電傳水位計是用來監測水位的變化,為了獲取水位信號對電傳水位計的傳感器部分進行了改造。在傳感器內部增加了干簧繼電器J3,J4,J5,取消內部電池而直接由系統供電。電阻R5~R8組成分壓器,分壓器輸出到ADCIN2口電路如圖2所示。當水位變化時浮子隨之升降,浮子升降3 cm,傳感器內部的磁鋼旋轉一周,即每變化1 cm有一個干簧繼電器會通斷一次。J3,J4,J5分別吸合時IN2口的電壓分別為1.6 V,2.5 V,3.2 V左右,無繼電器吸合時IN2口電壓為+5 V。根據ADCIN2口的電壓數值可以判斷是哪個干簧繼電器通斷,由IN2端電壓變化規律可以知道水位的上升或下降如圖3所示,圖3中(a)為上升,(b)為下降。

1.1.2水面水底信號的獲取
進行垂線水深測量時,鉛魚運行到河道斷面的指定垂線位置后開始下降,一旦鉛魚接觸水面則啟動水深計數器開始水深計數,當鉛魚繼續下降接觸水底時,水底開關閉合停止計數,該計數值即為本條垂線的水深初值。工作過程如下:在鉛魚下降過程中單片機不斷地讀取ADCIN1口電壓,鉛魚入水前繼電器J1,J2處于常閉位置,ADC0809輸入端IN1的電壓是由R3,R4分壓決定為2.5 V,一旦鉛魚接觸水面+5 V電壓通過水下極板→河水→鉛魚→副索1→ADC0809使IN1端電壓上升到3 V以上。單片機根據IN1口的電壓判斷鉛魚已接觸水面啟動水深計數,同時令P3.4輸出高電平繼電器J1接通常開觸點,由電路圖可知河水電阻與R4并聯使IN1口的電壓為1.5 V左右。當鉛魚繼續下降直到接觸河底,河底開關K2被壓通,鉛魚內部4.5 V電池E1接入電路中ADCIN1口電壓下降到0 V以下,單片機判斷已達到河底停止水深計數并通過P1口輸出信號使水深電動機停止運行。
1.1.3偏角信號的獲取
懸索纜道配有專門的偏角儀,用來修正水流導致鉛魚不能垂直下降到水底而產生的水深測量誤差。偏角儀可以測量出鉛魚受水流影響偏離正常位置的角度,再根據偏角的大小通過查表或公式計算來修正水深誤差。人工測量是用眼睛根據偏角儀的刻度估測偏角的大小,誤差較大。我們對偏角儀稍做改動增加一個電位器W1和相應的電路如圖1所示,通過機械聯動裝置將偏角的位移轉換成電位器的轉動從而改變W1的阻值,利用副索2將因偏角變化導致的電壓變化送到ADCIN0口。考慮到野外工作的特殊性,采用性能穩定密封性好的線繞電位器,由于IN0口的電壓變化與偏角之間不是線性關系用軟件查表方式確定偏角值。為了減少機械位移、纜索電阻等因素的影響,實際操作時當鉛魚未入水時測一次偏角作基準,達到水面和水底時分別測一次水面偏角和水底偏角,經修正后即得到較精確的偏角值。
1.1.4流速信號的獲取
流速的測量是由流速儀完成,測量流速時繼電器J1,J2均接通常開觸點-5 V電壓加于水下極板,K1為流速儀內部開關,流速儀每轉動一圈K1通斷一次。K1斷開時ADCIN0口的電壓為1.5 V左右,K1接通后ADCIN0口的電壓變化大于0.5 V,只要監測IN0口的電壓差就可以判斷流速儀的轉動情況。實際測量中IN0口的電壓差大小與測點垂線的距離和水質有關,距離越大電壓差越小,在150 m的河道中流速信號的電壓差大于0.5 V。用ADC0809監測流速信號,當VREF=5V時分辨率為0.02 V足以區別流速儀的轉動,考慮到某些不確定的干擾因素將電壓差的分辨率定在0.1 V,可以滿足一般中、小河道的測驗要求。對于較寬的河道可以通過改進電路或提高工作電壓的方法來增加電壓差。與PC機通信接口等部分組成的接口信息如:
(1)行程信號如水深、水平距離;
(2)水位信號;
(3)輸出控制信號用來控制電動機進行正轉、反轉、停止,使鉛魚按要求運動做定點測量。
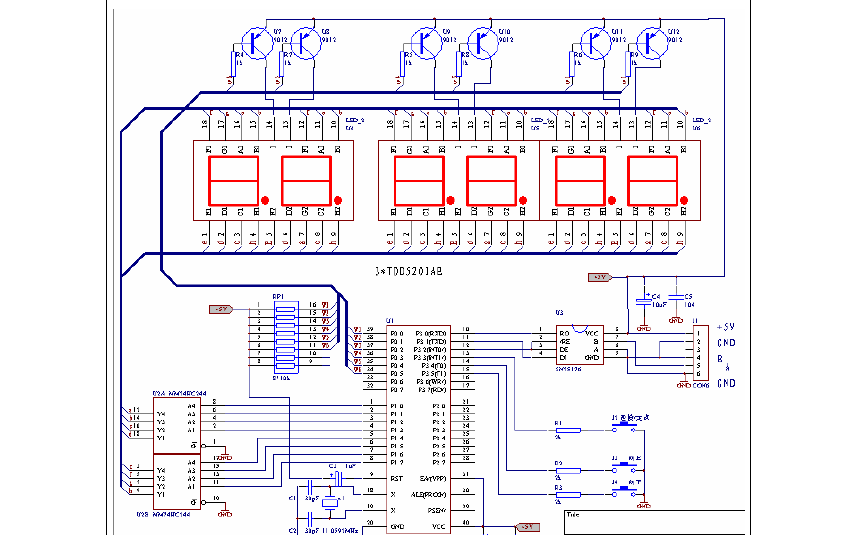
接口電路如圖1所示,電路充分利用ADC0809多路模數變換器將復雜的接口信息轉換成數字信號。同時還利用光電門將工作索行程(水深和水平距離的移動)轉換成電脈沖信號,送到ATMEL89單片機進行處理、顯示、控制完成自動測驗。
1.2行程信號的獲取接口電路
鉛魚的行程信號包括鉛魚水平往返移動的行程信號,和鉛魚測量水深時垂直移動的水深信號。位移信號的獲取如圖4所示。他是由加裝在機械傳動裝置上的切光板和光電門獲得。設計為纜索每移動1 cm切光板遮光一次,光電門產生一個脈沖。水深和往返信號分別從光敏二極管D3,D4上取出,經過異或門后加到單片機P3.2外部中斷0輸入端,每移動1 cm產生一個中斷,中斷服務程序可以區別鉛魚此時作水平往返移動還是垂直移動,兩者只取其一。

1.3其他電路部分
P1口的輸入功能是從控制面板讀入操作命令和初始化數值,輸出功能是輸出控制信號。一是控制行程電動機正、反轉和停機,使鉛魚按測驗要求進行垂直和水平運動;二是在水深測量過程中控制繼電器J1、J2的閉合與斷開獲取水面水底信號。顯示打印電路部分用6個LED管顯示和微型打印機進行簡單打印。用 P3.1串口與PC機相連可以進行數據的轉存和進一步處理,顯示和打印。
2系統軟件流程圖
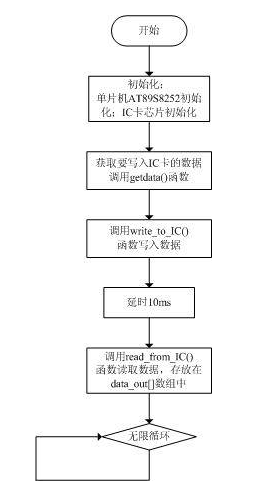
本系統的軟件約占7 kB,系統程序流程圖如圖5所示。
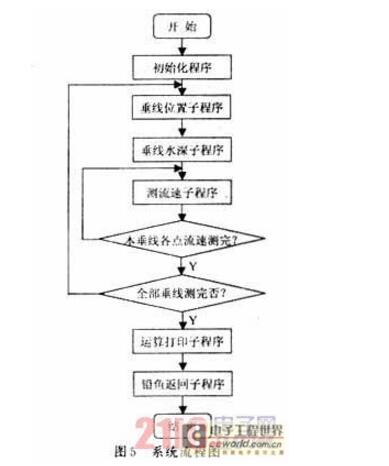
程序分為系統管理、運算處理、測驗控制3大模塊。系統管理模塊包括:初始化、系統監控、操作切換、緊急處理等程序。運算處理模塊包括:數據運算、誤差修正、顯示打印等程序。測驗控制模塊是由包括:測垂線到起始點距離、測垂線水深、測垂線流速、測垂線水位、接口數據采集等諸多子程序組成。
為了盡量減少測量誤差保證測量精度嚴格符合水文規范要求,在測垂線水深子程序中采用了二次入水操作,程序流程如圖6所示。
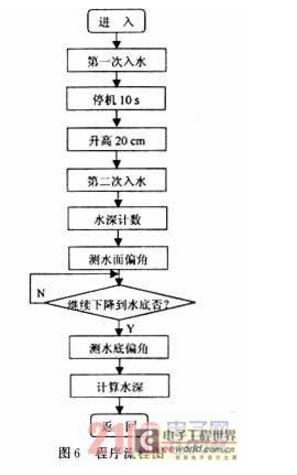
實際水深測量中由于鉛魚的運動會引起纜索的起伏跳動而造成測量誤差,我們在程序中設定的操作是:當鉛魚入水后暫停在水面10 s不進行水深計數,待其穩定后升出水面20 cm,再第二次進入水面。鉛魚第二次到達水面后啟動水深計數暫停下降,測量水面偏角θA,鉛魚繼續下降直到河底停止水深計數,測量水底偏角θB。最后根據干繩長度(纜索到水面的高度)、濕繩長度(水深初值)、θA,θB計算出實際的該條垂線水深值。
3、結語
ATMEL89單片機水文纜道測驗系統具有較強的兼容性,適合中、小河道的自動或半自動測驗,操作方便性能穩定,測驗精度達到部頒《規范》要求,有效地減少了操作者的勞動強度和工作時間。
-
單片機
+關注
關注
6023文章
44376瀏覽量
628470 -
水文纜道
+關注
關注
0文章
2瀏覽量
5192
發布評論請先 登錄
相關推薦
用單片機實現溫度遠程顯示設計
用AT89S8252單片機實現熱水溫度遠程顯示
用單片機實現溫度遠程顯示
AT89S8252微控制器系統內編程應用實例的介紹
AT89S8252微控制器內部閃速存儲器,EEPROM和其他
AD7711與單片機AT89S8252的接口技術
基于單片機AT89S8252與AD1674的數據采集
基于AT89S8252 單片機的汽車瞬時燃油油量檢測系統的設
用單片機實現溫度遠程顯示資料
基于AT89S8252單片機的串行接口及溫度遠程顯示的實現
AT89S8252單片機實現接觸式IC卡讀寫控制的設計
使用單片機實現溫度遠程顯示的論文說明





 工商網監
工商網監
評論