 LSM6DSV16X基于MLC智能筆動作識別(4)----中斷獲取智能筆狀態
LSM6DSV16X基于MLC智能筆動作識別(4)----中斷獲取智能筆狀態
概述
LSM6DSV16X 支持通過中斷(INT)輸出 MLC(機器學習核)識別的動作。具體來說,MLC 可以配置為在滿足某些條件或機器學習分類結果發生變化時生成中斷信號。 LSM6DSV16X 的機器學習核可以配置為在分類結果發生變化時生成中斷,并且該中斷信號可以路由到中斷引腳(如 INT1 或 INT2)。系統可以在檢測到動作時做出響應,而不需要持續輪詢傳感器,從而優化功耗和效率。
最近在弄ST的課程,需要樣片的可以加群申請:615061293 。
視頻教學
[https://www.bilibili.com/video/BV1Kb4FeME9R/]
樣品申請
[https://www.wjx.top/vm/OhcKxJk.aspx#]
源碼下載
[https://download.csdn.net/download/qq_24312945/89843520]
硬件準備
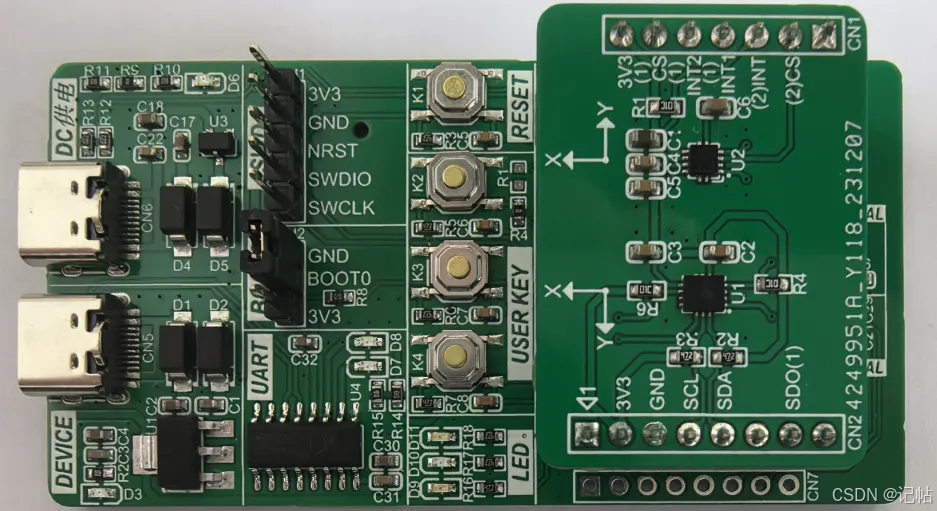
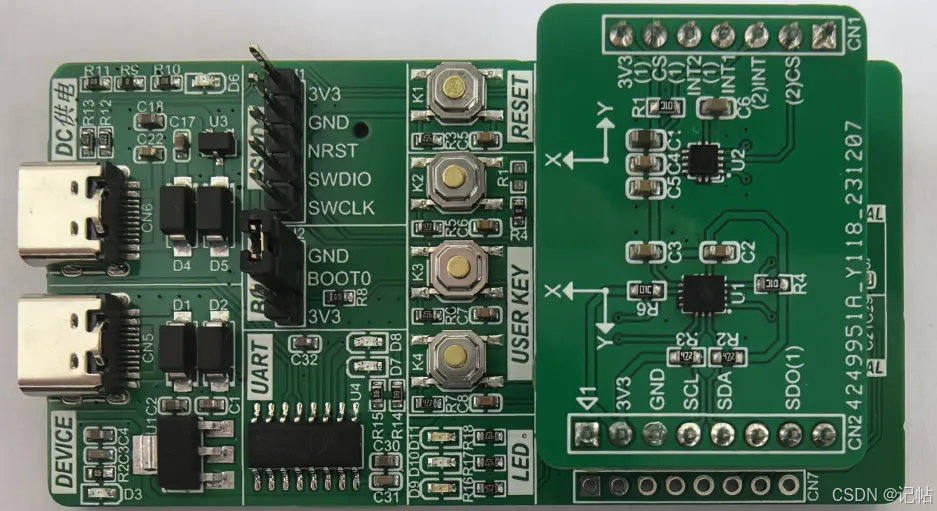
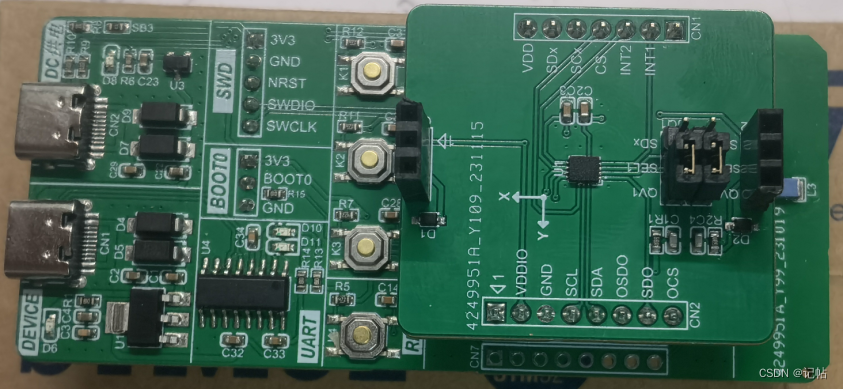
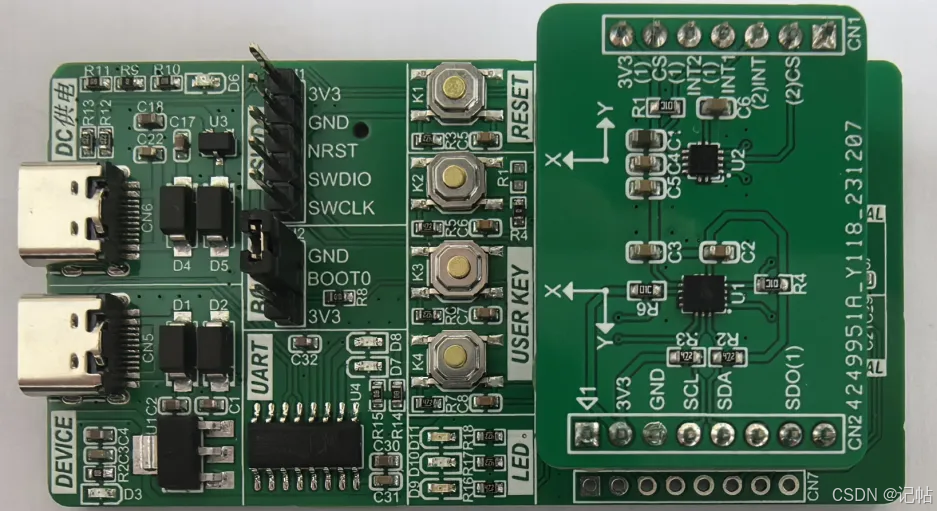
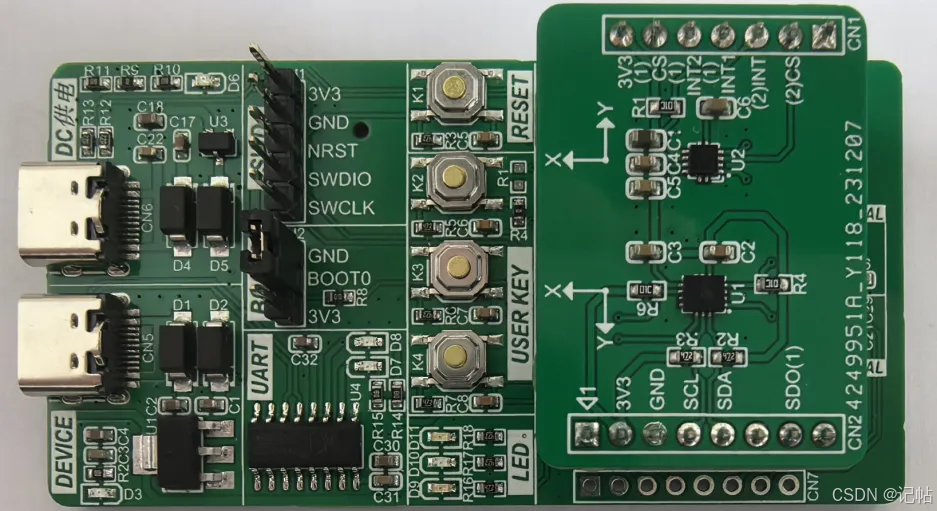
首先需要準備一個開發板,這里我準備的是自己繪制的開發板,需要的可以進行申請。
主控為STM32H503CB,陀螺儀為LSM6DSV16X,磁力計為LIS2MDL。
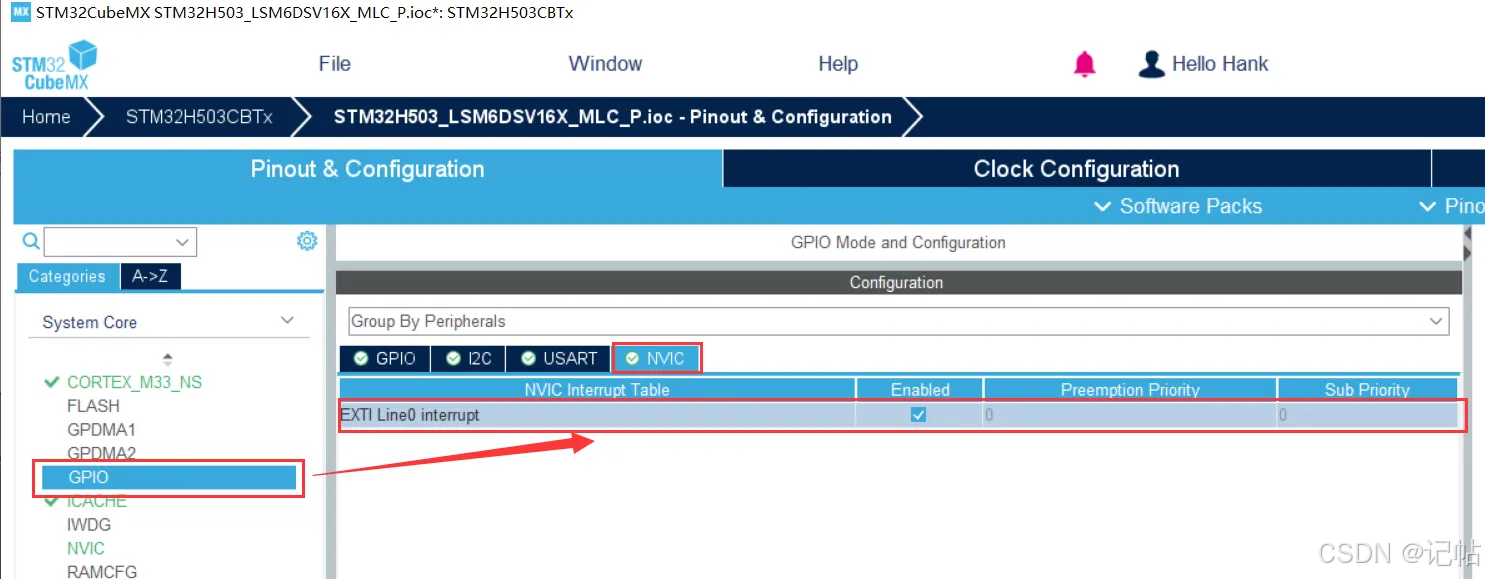
開啟INT中斷
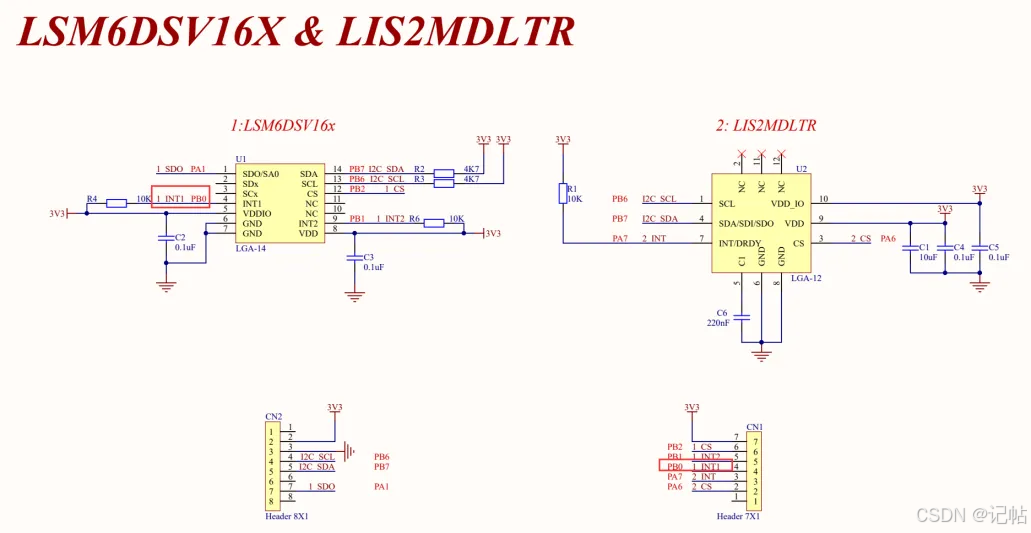
陀螺儀LSM6DSV16X的中斷管腳接到了PA6,需要將PA6設置為中端口。
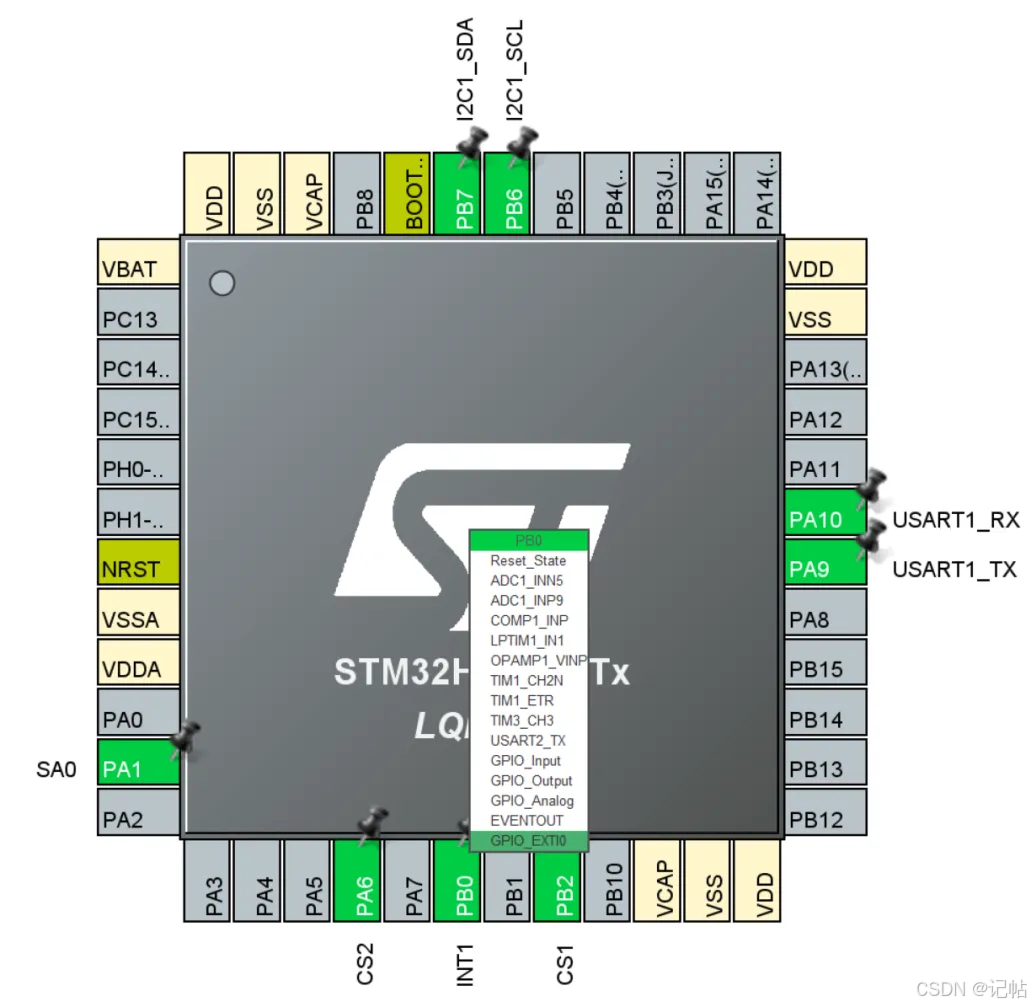
開啟中斷。
參考驅動程序
[https://github.com/STMicroelectronics/lsm6dsv16x-pid/tree/main]
配置中斷
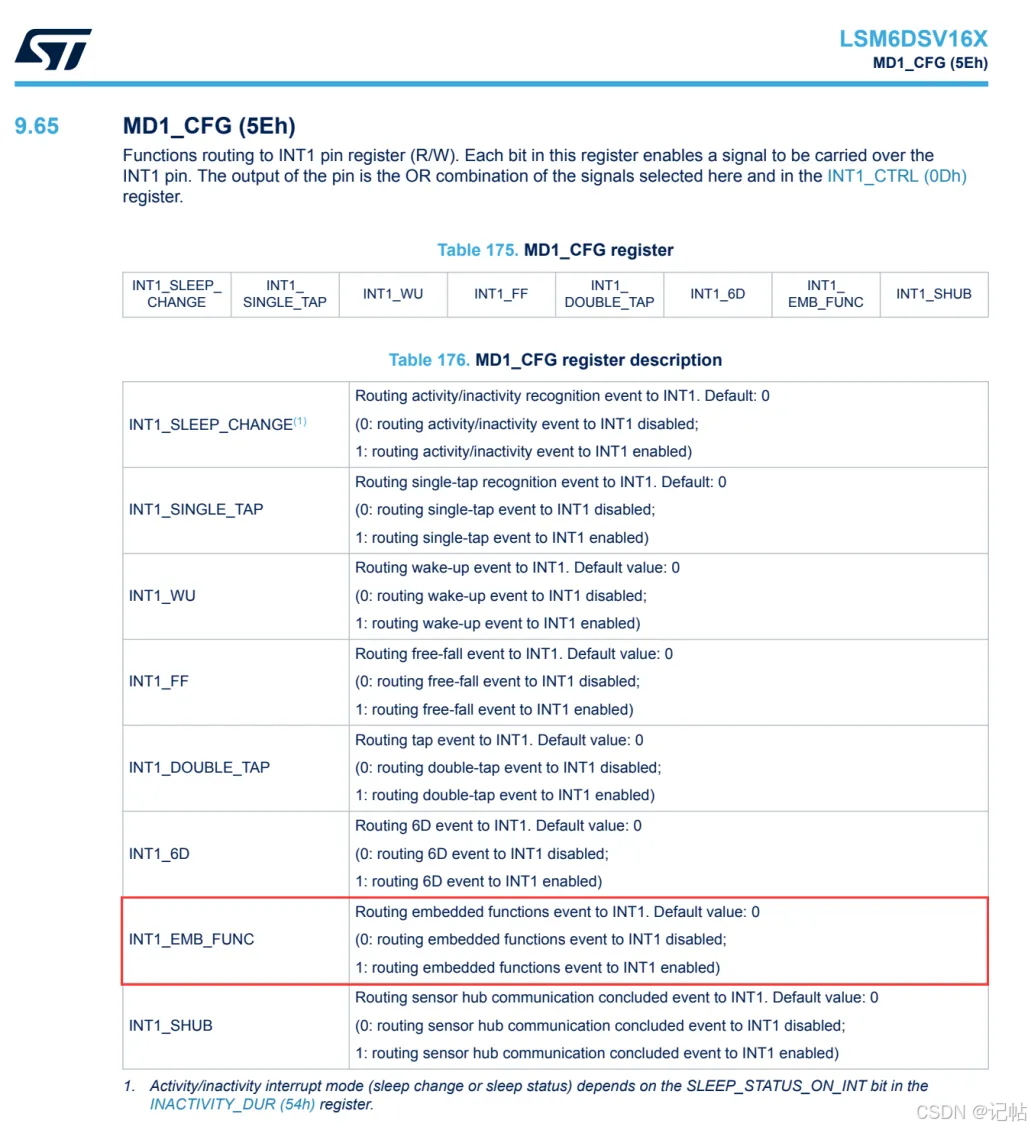
MD1_CFG (5Eh) 寄存器用于將各種事件路由到 INT1 引腳。每個位代表不同的功能,通過設置這些位,你可以選擇將哪些傳感器事件輸出到 INT1 引腳。下表詳細描述了每個位的功能:
INT1_EMB_FUNC (bit 1):
● 用于將嵌入式功能事件(如機器學習或狀態機的輸出)路由到 INT1。
mian.c中定義變量。
/* USER CODE BEGIN 0 */
uint8_t mlc_flag = 0;
/* USER CODE END 0 */
mian.c中開啟中斷。
// Enable interrupt for MLC on INT1 pin
lsm6dsv16x_pin_int_route_t pin_int;
lsm6dsv16x_pin_int1_route_get(&dev_ctx, &pin_int);
pin_int.emb_func = PROPERTY_ENABLE;
lsm6dsv16x_pin_int1_route_set(&dev_ctx, &pin_int);
在stm32h5xx_it.c中添加回調函數引用。
/* USER CODE BEGIN 0 */
extern void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin);
/* USER CODE END 0 */
處理PB0外部中斷線0(EXTI Line0)的中斷。
/**
* @brief This function handles EXTI Line0 interrupt.
*/
void EXTI0_IRQHandler(void)
{
/* USER CODE BEGIN EXTI0_IRQn 0 */
HAL_GPIO_EXTI_Callback(INT1_Pin);
/* USER CODE END EXTI0_IRQn 0 */
HAL_GPIO_EXTI_IRQHandler(INT1_Pin);
/* USER CODE BEGIN EXTI0_IRQn 1 */
/* USER CODE END EXTI0_IRQn 1 */
}
在main.c中添加回調函數的定義,檢查中斷是否由 GPIO_PIN_0引腳觸發。
/* USER CODE BEGIN 4 */
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin){
if(GPIO_Pin == GPIO_PIN_0)
{
mlc_flag=1;
}
}
/* USER CODE END 4 */
主程序
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
if(mlc_flag==1)
{
mlc_flag=0;
lsm6dsv16x_mlc_handler();
if (event_catched != 0)
{
printf("event_catched=%d",event_catched);
// 握(0) 拍(1) 揮(2) 拍(3) 靜(4) 止(5)
switch(event_catched)
{
case 2:
event_catched = 0;
printf("閑置(Idle)rn");
break;
case 4:
event_catched = 0;
printf("書寫(Writing)rn");
break;
case 8:
event_catched = 0;
printf("其他(other)rn");
break;
case 12:
event_catched = 0;
printf("靜止(Steady)rn");
break;
default:break;
}
event_catched = 0;
}
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
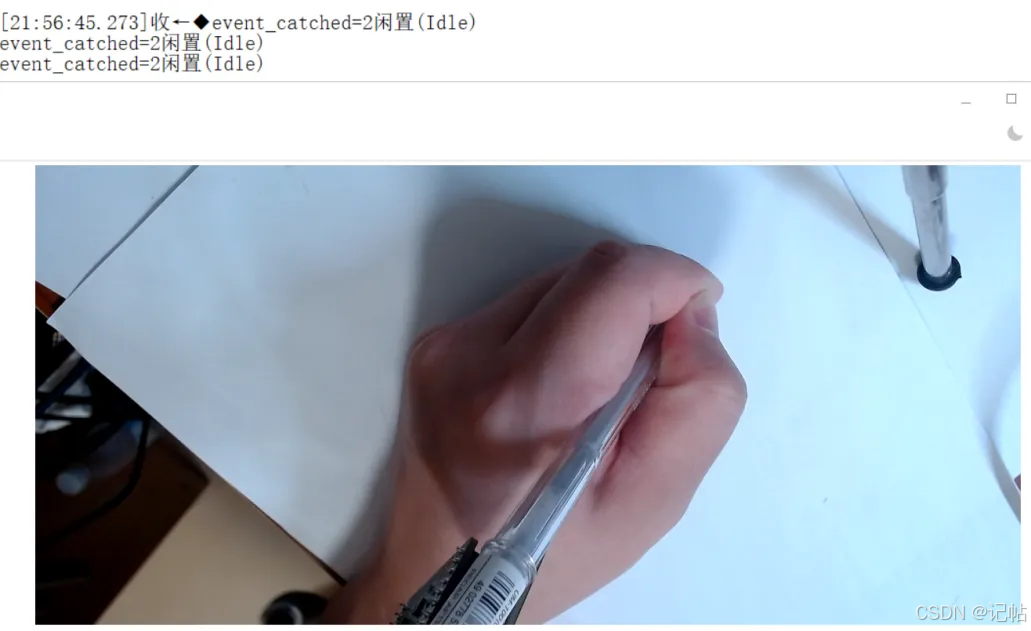
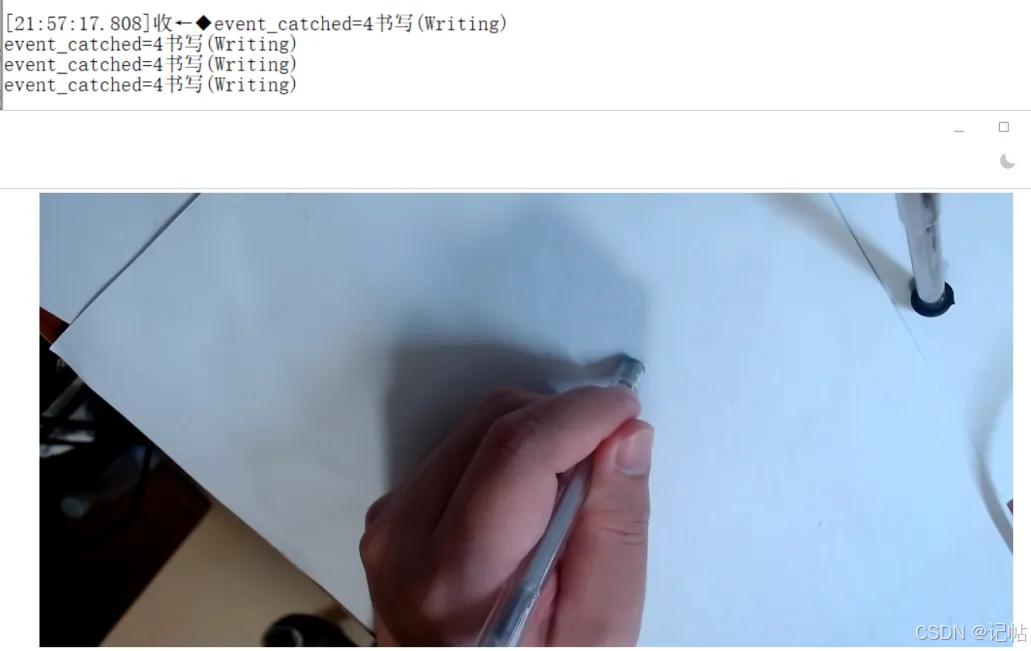
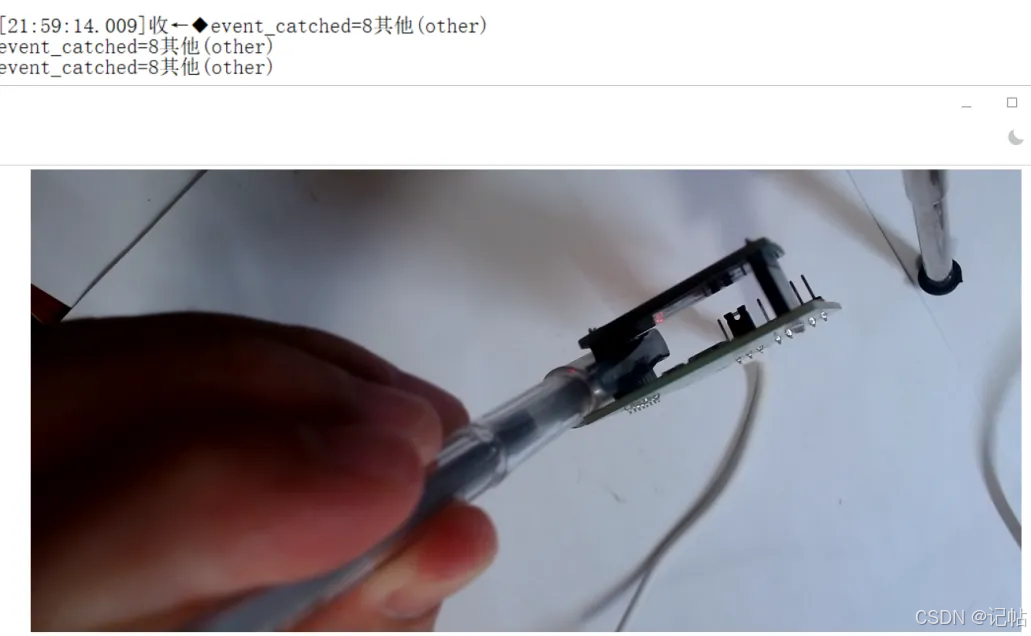
演示
靜止狀態如下。

閑置狀態如下,手抓筆靜止。
書寫狀態如下,移動筆進行識別判定。
其他如下,筆倒置。
審核編輯 黃宇
-
MLC
+關注
關注
0文章
41瀏覽量
17288 -
智能筆
+關注
關注
1文章
15瀏覽量
5355
發布評論請先 登錄
相關推薦
陀螺儀LSM6DSV16X與AI集成(1)----輪詢獲取陀螺儀數據

陀螺儀LSM6DSV16X與AI集成(3)----讀取融合算法輸出的四元數

陀螺儀LSM6DSV16X與AI集成(7)----FIFO數據讀取與配置

LSM6DSV16X基于MLC智能筆動作識別(2)----MLC數據采集
LSM6DSV16X基于MLC智能筆動作識別(3)----MEMS Studio訓練數據
陀螺儀LSM6DSV16X與AI集成(13)----中斷獲取SFLP四元數
陀螺儀LSM6DSV16X與AI集成(14)----上報匿名上位機
請問lsm6dsv16x可以直接讀取觸摸手勢嗎?
求助,是否有在LSM6DSV16X中使用傳感器融合低功耗算法的示例

ST LSM6DSV16X iNEMO慣性模塊相關的使用信息和應用提示
意法半導體新款MEMS IMU LSM6DSV32X實現精確姿態識別應用
LSM6DSV16X基于MLC智能筆動作識別(1)----輪詢獲取陀螺儀數據





 工商網監
工商網監
評論