 爆火的端到端如何加速智駕落地?
爆火的端到端如何加速智駕落地?
編者語:「智駕最前沿」微信公眾號后臺回復:C-0551,獲取本文參考報告:《智能汽車端到端技術研究報告》pdf下載方式。
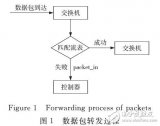
“端到端”無疑是2024年自動駕駛行業最火熱的一個詞了!(相關閱讀:實現自動駕駛,唯有端到端?)端到端技術通過消除模塊間數據傳遞中的信息損耗和延遲,以神經網絡驅動感知到控制輸出的直接轉換,有效提升系統的決策效率與整體性能。端到端技術的應用在智能駕駛領域日益受到重視。傳統的自動駕駛技術基于模塊化架構,將感知、決策、規劃和控制等功能模塊分別處理,以實現最終的車輛控制。盡管模塊化設計在早期階段為自動駕駛的發展奠定了堅實基礎,但隨著行業向更高自動化級別邁進,模塊化架構暴露出效率低下、信息傳遞損耗等問題。為解決這些痛點,端到端架構逐步進入行業視野,并逐漸成為推動L4及以上高級別自動駕駛發展的關鍵路徑。端到端智能駕駛系統借助深度學習模型,將傳感器輸入直接映射為車輛控制指令,避免了傳統模塊化設計中的冗余轉換步驟,使得系統能夠實現全局最優和高效的計算性能。
端到端技術概述
1.1 端到端技術的定義與分類
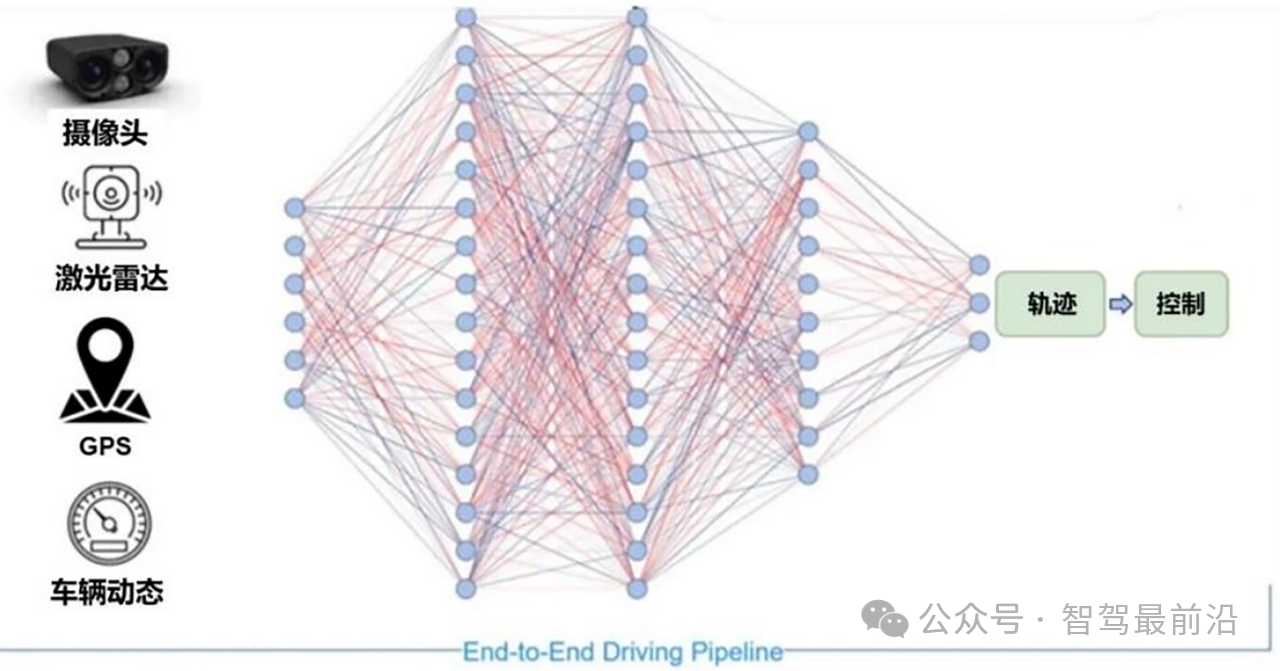
端到端技術在智能駕駛領域是指由傳感器獲取的數據直接通過深度學習神經網絡模型處理,輸出具體的車輛控制指令,實現從“感知”到“決策”的一體化過程,端到端智能駕駛系統一般可以分為狹義和廣義兩種類型:狹義端到端指的是通過單一神經網絡模型將傳感器數據(如攝像頭圖像或激光雷達信息)直接轉化為車輛的控制信號,包括轉向角、加速和制動等動作指令。該模式完全基于神經網絡進行數據處理,省去了中間的顯式數據接口和規則設定,整個過程全由神經網絡驅動。狹義端到端模式能夠顯著提高系統的集成度和信息處理效率,但由于其完全依賴數據驅動,模型訓練對數據和算力的要求極高。

狹義端到端自動駕駛架構
廣義端到端則允許在感知、決策和規劃模塊之間保留人工設定的接口,以實現分階段處理。廣義端到端雖然保留了部分模塊化特征,但也利用了神經網絡的端到端學習能力,通過模塊間特征向量的設計降低信息損失。廣義端到端的設計既可以降低算法復雜度,又在一定程度上保證了數據傳遞的精確性和系統的整體性能。這種廣義架構為端到端系統的過渡奠定了基礎,為大規模應用提供了更高的靈活性。
廣義端到端自動駕駛架構
1.2 端到端架構的優勢
端到端技術之所以在智能駕駛領域備受青睞,主要是由于其在信息傳遞效率、系統計算性能和泛化能力等方面的優勢。傳統模塊化方案中,由于數據在感知、決策、規劃和控制之間頻繁傳遞,系統的反應速度和實時性受到影響,且多次轉換過程會導致誤差累計和信息丟失。端到端架構可以顯著減少信息傳遞的損耗。通過使用單一的神經網絡模型,傳感器數據可以在不經多次轉換的情況下直接用于控制決策,從而有效降低信息在模塊間傳遞的丟失和延遲。此外,端到端系統通過壓縮模塊化設計中的子模塊數量,實現了系統架構的簡化,有助于降低車輛計算系統的功耗和體積,從而更適合大規模商業化量產。端到端架構在系統計算效率方面也具有顯著優勢。由于系統不再需要多個模塊的分層處理,而是采用深度學習神經網絡一次性進行感知、決策、規劃和控制的全局優化,端到端架構在信息處理速度上較傳統系統有明顯提升。此外,端到端系統能夠高效學習和適應新場景的能力,其泛化能力得到顯著提升。基于神經網絡的深度學習模型在海量數據中自適應學習,在面對陌生或極端環境時,端到端模型比傳統規則驅動的模塊化方案具有更強的應對能力。
技術架構及實現方法
2.1 端到端的三階段架構
端到端系統在實現過程中通常分為三個階段,分別是感知“端到端”、模塊化“端到端”和OneModel(單一模型)端到端,這三個階段是端到端技術逐步成熟并向單一模型收斂的路徑。
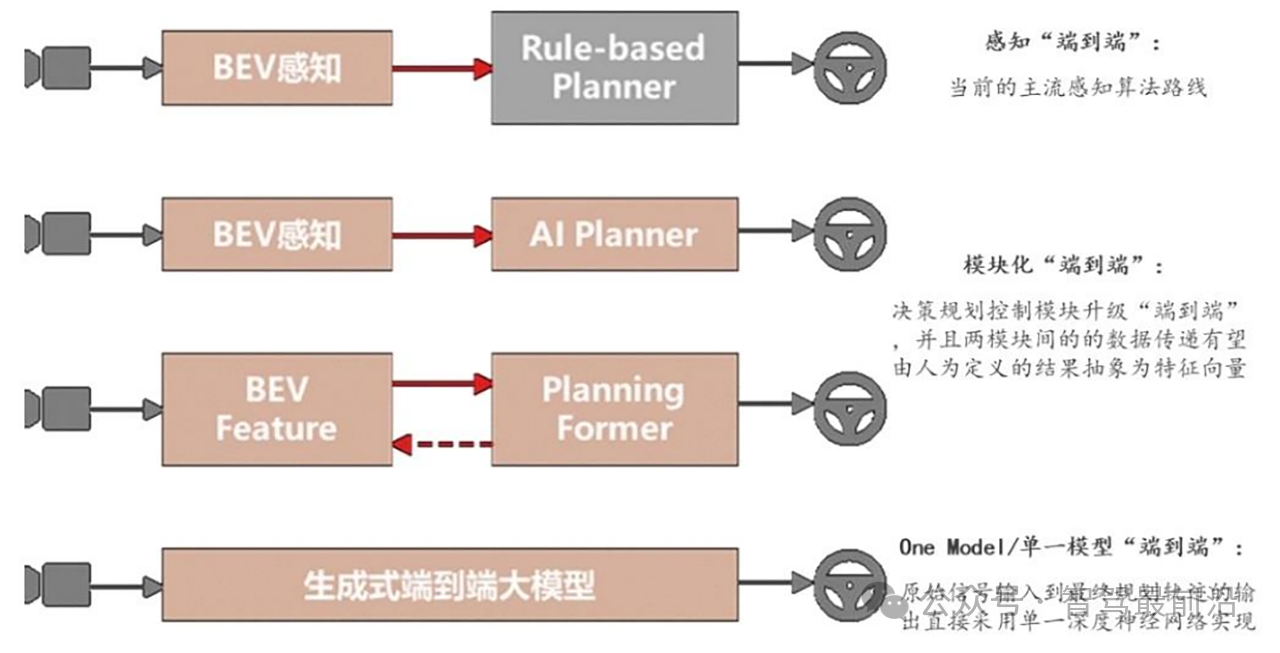
端到端自動駕駛架構演進示意圖
感知“端到端”:在端到端技術的初步實現中,感知模塊是端到端神經網絡的主要應用場景。該階段利用基于多傳感器融合的神經網絡模型處理感知任務,以實現多維度數據融合和深度特征提取。常見的方案是采用鳥瞰視角(BEV)結合Transformer結構,通過對場景的整體特征建模,實現精確的目標檢測和障礙物識別。目前,感知“端到端”是行業中應用最廣泛的端到端方案,在自動駕駛感知領域有較大的技術成熟度。模塊化“端到端”:在感知端到端的基礎上,逐步將決策和規劃模塊引入神經網絡模型中,形成模塊化端到端體系。在該階段,控制模塊不再依賴于傳統的規則設計,而是通過深度學習模型生成控制決策。為避免感知到控制之間的數據傳遞損耗,模塊間采用特征向量形式進行數據交換。模塊化端到端實現了感知、決策和規劃之間的協調與數據無損傳遞,是端到端技術逐步向一體化系統過渡的階段。OneModel端到端:最終形態的端到端系統以單一神經網絡模型實現從傳感器數據輸入到車輛運動軌跡的輸出。OneModel在架構上實現了模塊融合,打破了感知、決策和規劃之間的界限,直接輸出路徑規劃結果。該模型主要基于強化學習和模仿學習技術訓練,通過自動化的數據特征學習避免了人為規則的干預。OneModel端到端是端到端技術的理想狀態,具備更高的系統集成度和全局最優能力。
2.2 模仿學習與強化學習
在端到端系統的訓練過程中,模仿學習(Imitation Learning)和強化學習(Reinforcement Learning)是主流的神經網絡訓練方法。模仿學習通過模仿專家駕駛行為,讓神經網絡學習駕駛的最佳策略。模仿學習采用行為克隆(Behavior Cloning)和逆最優控制(Inverse Optimal Control)等算法,主要目標是將人類專家駕駛數據作為輸入,讓模型在不同駕駛環境中學習最佳響應策略。模仿學習的優點在于學習過程較為直接,但對數據依賴度高,且在復雜場景中容易出現泛化問題。強化學習則是通過構建獎勵函數和環境模型,使得智能體通過不斷試錯優化駕駛策略。相比模仿學習,強化學習在端到端技術中表現出更強的適應性。通過設計合理的獎勵函數,強化學習可以在不斷的訓練過程中提升模型應對復雜場景的能力。然而,強化學習的設計難點在于如何準確地定義獎勵函數,以適應道路、天氣、車輛動態等多種環境的變化。
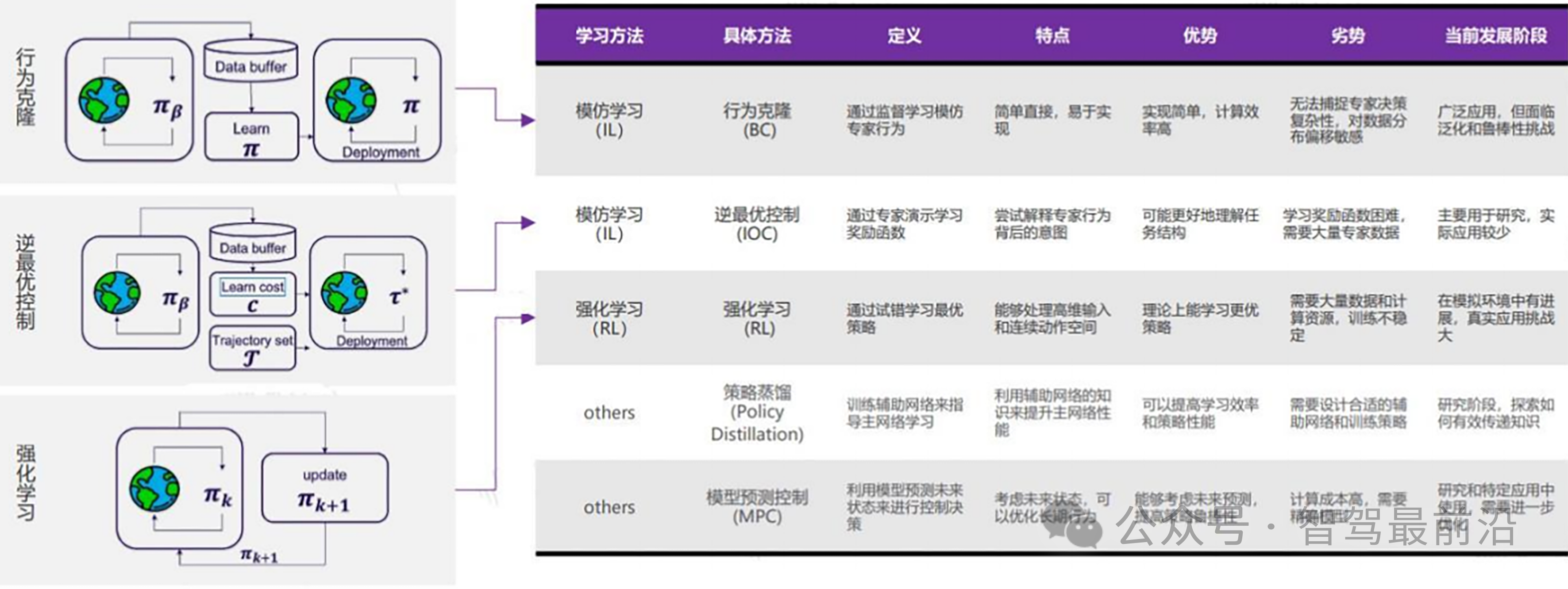
端到端自動駕駛背后的基本訓練方法
端到端技術的價值與優勢分析
3.1 全局優化與系統效率
端到端系統實現了從感知到決策的全局優化,在系統整體性能和計算效率方面相較傳統方案具備顯著優勢。在傳統模塊化設計中,系統需要通過不同模塊之間的多次信息傳遞完成復雜的智能駕駛任務,每個模塊之間的連接不僅需要大量的接口設計,還導致了信息傳遞的損耗。端到端架構則通過深度神經網絡模型,實現了數據從輸入到輸出的一次性處理,使得整個過程能夠圍繞最終的控制目標進行最優計算。在系統計算效率方面,端到端架構通過壓縮多重任務的分布式計算,將不同模塊整合為單一神經網絡模型,顯著減少了計算資源的消耗,使系統更高效。特別是在執行控制過程中,端到端架構能夠迅速對外界環境的變化做出反應,并生成實時的駕駛指令,以達到較高的響應速度。此外,由于端到端系統以神經網絡模型為核心,系統的整體計算架構可以更緊湊,為車輛上路提供了更輕量化和低功耗的方案,有助于降低車輛的硬件成本。
3.2 信息無損傳遞與泛化能力
傳統模塊化架構雖然穩定且具有良好的可解釋性,但由于多模塊分割,導致信息傳遞過程中產生丟失和延遲,且模塊之間的誤差逐層累積,影響了系統的整體性能。端到端架構通過避免中間數據轉換,實現了信息的無損傳遞,有效提高了系統的精確度和可靠性。
3.3 系統簡化與可靠性提升
端到端架構相較于傳統模塊化架構的另一顯著優勢是系統結構的簡化。傳統自動駕駛系統包括感知、決策、規劃和控制等多個模塊,每個模塊需單獨處理一部分信息,并依賴上一個模塊的輸出。然而,這種層層傳遞的模式在實際應用中易導致信息滯后、誤差疊加等問題,最終影響系統的實時性和安全性。端到端系統通過統一的神經網絡架構,直接將輸入數據轉化為控制信號,無需依賴中間模塊,這不僅減少了復雜的接口設計,也使得系統更易于維護和更新。此外,端到端系統的可靠性也得到了顯著提升。由于端到端架構通過深度學習算法直接在大規模數據集上進行訓練,它能夠適應多種場景和環境變化,不再局限于預定義的規則,具有極強的環境自適應性。特別是在極端天氣條件、復雜道路狀況和突發交通事件中,端到端系統可以通過已學習到的綜合特征進行快速決策,提高車輛在非結構化道路中的行駛安全性。這種靈活性和魯棒性使得端到端技術在未來自動駕駛的普及過程中具有重要價值。
市場進展與產業化應用
4.1 學術研究進展
近年來,端到端技術在智能駕駛領域的應用逐步加深,許多學術研究和技術論文對端到端系統的架構、算法優化和訓練方法進行了探討。例如,2023年CVPR大會上由上海人工智能實驗室提出的UniAD模型獲得了最佳論文獎。UniAD模型采用了一種基于多任務學習的聯合優化框架,通過整合感知、預測、規劃等多個任務,提升了系統在端到端路徑規劃方面的效率和安全性。UniAD模型的核心架構基于Transformer,能夠實現對多種輸入數據的有效處理。其特征提取過程中,分別設計了TrackFormer、MapFormer、MotionFormer等模塊,以實現對動態交通元素、道路信息和車輛交互的全方位理解。特別是該模型將傳統模塊化的規劃算法整合入統一的端到端網絡框架,最終生成車輛的行車軌跡和規劃路徑,并通過碰撞檢驗確保行駛安全。UniAD的創新之處在于它將多任務學習和端到端優化相結合,為端到端智能駕駛的實現提供了有力支持,并為未來的實際應用打下了理論基礎 。
4.2 產業應用案例
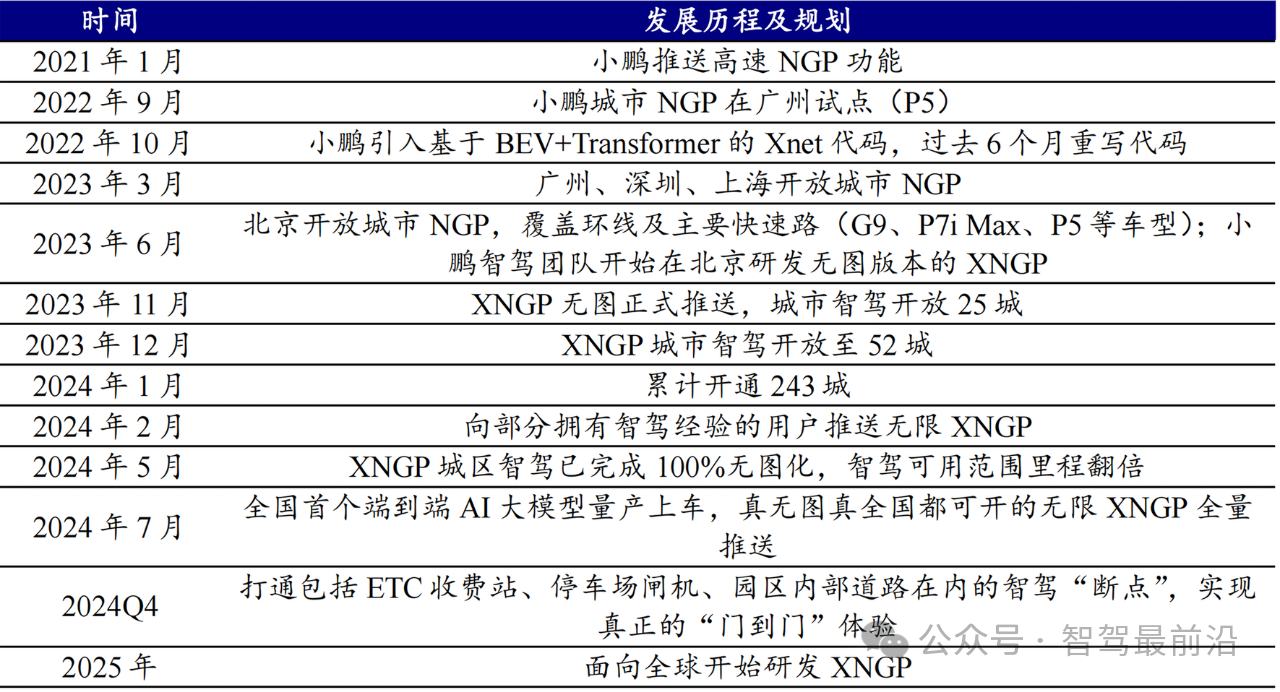
端到端技術的產業化應用主要集中在領先的智能汽車制造商和技術公司。近年來,特斯拉、小鵬、理想等企業紛紛投入到端到端技術的開發與應用上,并已在量產車型中初步實現了端到端架構的一部分功能。特斯拉:特斯拉在其最新的FSD(Full Self Driving)V12版本中引入了端到端架構,以簡化自動駕駛系統的控制路徑。FSD V12版本采用了完全端到端的神經網絡模型,直接從攝像頭圖像輸入生成控制信號。這一模型的引入,使得車輛的決策速度和響應能力大幅提升,且避免了傳統模塊化方案中因冗余轉換導致的系統延遲。特斯拉通過內部測試表明,FSD V12具備更高的路徑規劃精確度,并已實現穩定的城市道路駕駛 。小鵬汽車:小鵬的XNet系統基于BEV(鳥瞰圖)感知模型,結合端到端架構設計,將攝像頭輸入數據直接轉化為三維空間中的檢測結果。與傳統方案不同,XNet系統在設計時減少了大量人工規則,直接通過端到端模型完成感知和規劃任務。小鵬的端到端架構已在多個城市的道路測試中取得了較好的表現,且在系統穩定性和復雜路況處理能力上具有顯著優勢。
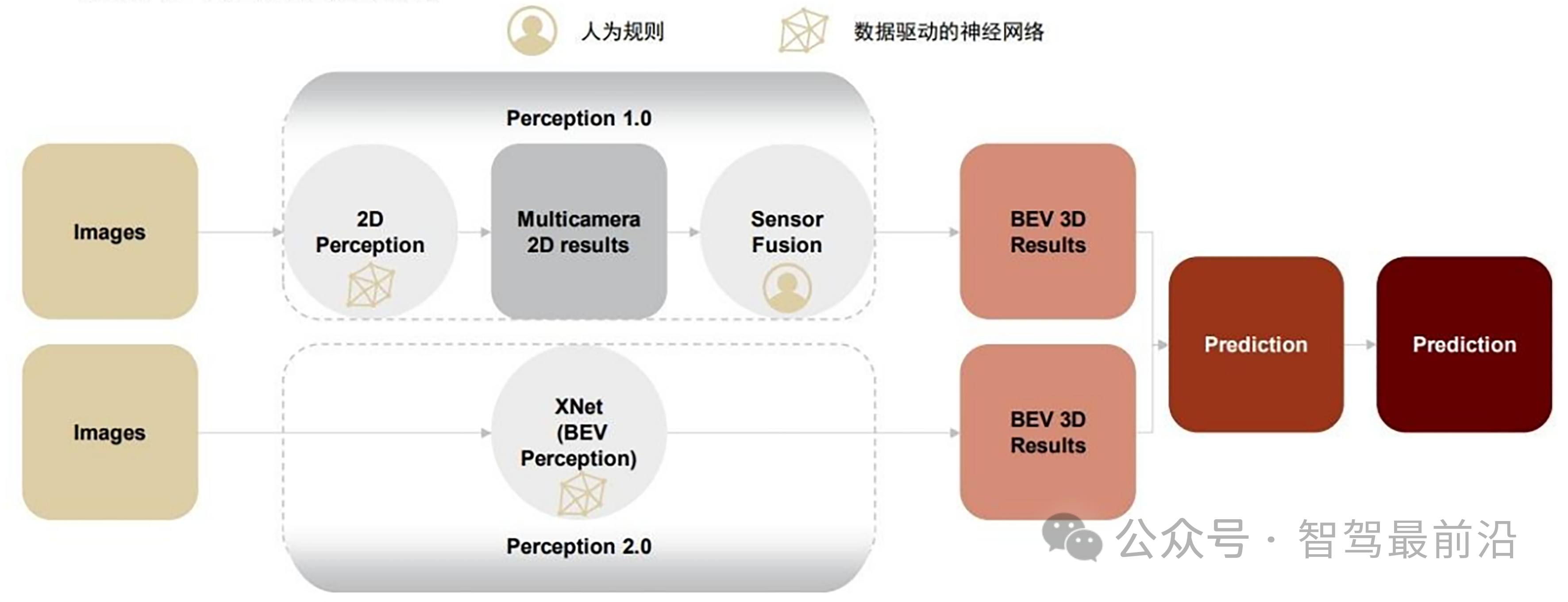
小鵬汽車端到端架構
理想汽車:理想汽車采用了端到端架構的增強版本,結合了BEV和視覺模型,實現了從感知到規劃的全方位控制。理想的系統具有“無圖駕駛”功能,能夠在沒有高精地圖的情況下通過實時攝像頭輸入生成道路規劃,適應性較強,能夠應對多變的道路環境。該系統已在多個城市進行了實際路測,具備較高的安全性和穩定性,展示了端到端技術在復雜環境中的可靠性 。
關鍵驅動因素與挑戰
5.1 數據和算力的要求
端到端技術對數據和算力的要求非常高。端到端模型的核心是深度神經網絡,需要通過大量的訓練數據來實現模型的泛化和精確性。對于高級自動駕駛來說,車輛在實際路況中收集的數據必須足夠豐富,涵蓋不同的場景、天氣、光照等條件,以確保模型能夠在各種環境下穩定運行。然而,數據采集和標注成本高昂,且數據隱私和安全問題也需要考慮。在算力方面,端到端模型通常涉及大量的參數和多層神經網絡結構,特別是當端到端模型整合了感知、規劃和控制模塊時,所需算力成倍增加。對于整車廠商來說,必須投入大量資源來構建和維護高性能計算基礎設施。以特斯拉為例,其在自動駕駛訓練中采用了基于NVIDIA和自研芯片的高性能計算平臺,以支持端到端模型的大規模訓練。此外,云計算和邊緣計算的結合也被視為解決算力瓶頸的潛在方案,能夠實現高效的實時數據處理和模型更新 。
5.2 可解釋性與安全性問題
端到端模型的“黑箱”特性帶來了可解釋性問題。由于端到端系統直接從輸入數據生成控制指令,其內部決策路徑難以被解讀和驗證,特別是在極端條件下,模型的行為有時會顯得不夠透明。為了確保端到端系統的安全性和可靠性,行業正在探索多種方法來提升模型的可解釋性。例如,部分研究通過在端到端系統中引入基于規則的輔助模塊,使得系統在關鍵決策點上增加更多可解釋信息。此外,通過數據分析和可視化手段展示模型的內部特征,幫助開發人員更好地理解模型的工作原理 。
產業機遇與未來前景
6.1 整車廠商的機遇
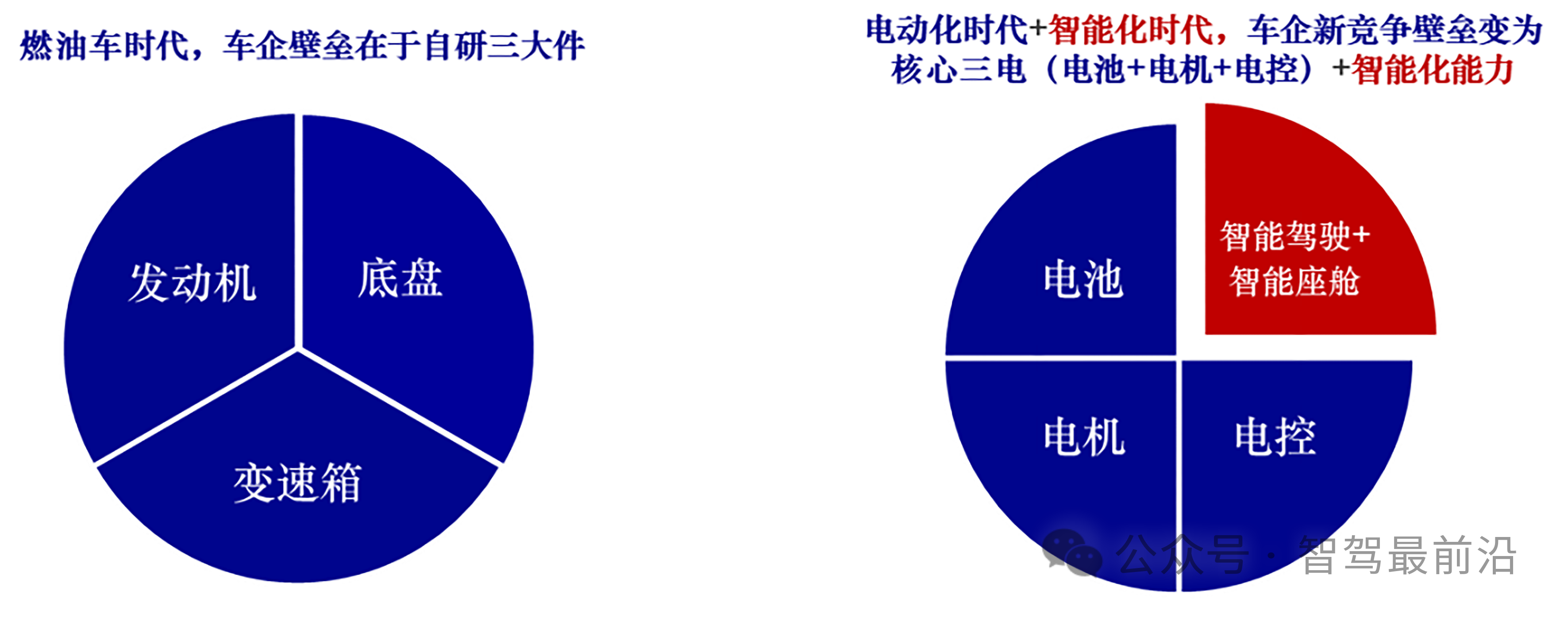
端到端技術為整車廠商帶來了新的機遇。隨著高級別自動駕駛需求的提升,整車廠商不僅需要具備硬件制造能力,還需構建自主的智能駕駛算法體系。領先車企如特斯拉、理想和小鵬在端到端技術的研發上投入了大量資源,并逐步構建了各自的技術優勢。未來,端到端架構有望成為智能汽車的主流解決方案,這不僅能夠增強廠商的競爭力,還能夠在實際應用中提高用戶的駕駛體驗。例如,特斯拉通過其端到端FSD系統實現了高度自動化的城市駕駛,極大地吸引了用戶的關注。在商業化層面,端到端技術降低了系統開發和維護的成本,為整車廠商實現智能駕駛的快速部署提供了支持。整車廠商可以通過端到端系統實現車輛的統一升級,減少硬件變更需求,從而提高系統的擴展性和靈活性。未來,端到端架構可能會成為智能汽車發展的核心技術,使得整車廠商能夠在技術競爭中占據主導地位。
6.2 零部件供應商的角色
端到端架構的實現不僅依賴整車廠商的研發投入,零部件供應商在其中也扮演了關鍵角色。端到端技術要求E/E(電氣/電子)架構的升級,并且需要高性能計算芯片和傳感器的支持。例如,德賽西威、地平線等供應商正在為車載計算提供更高性能的域控制器,以滿足端到端系統的高算力需求。同時,感知層硬件供應商如Velodyne、Luminar等也在為端到端系統提供先進的傳感器解決方案。端到端系統對車輛的E/E架構提出了高度一體化的要求,零部件供應商需要提供協同度更高的硬件架構和數據采集方案,確保系統在運行過程中具備可靠的性能表現。隨著端到端技術在行業內的普及,供應鏈將面臨巨大的市場需求,尤其是在數據傳輸、算力芯片和傳感器等領域。對于供應商而言,深度參與智能駕駛系統的開發能夠顯著提升其市場競爭力,并助力端到端系統的全面落地 。
結論與展望
端到端技術作為自動駕駛領域的重要變革,正在加速實現高級別自動駕駛的愿景。相比傳統模塊化架構,端到端系統在信息傳遞效率、計算性能和系統簡化等方面具備顯著優勢。盡管端到端技術在數據需求、算力壓力、可解釋性和安全性等方面仍面臨挑戰,但其全局最優、無損傳遞的特點使其具備了在未來占據主導地位的潛力。未來,隨著AI底層技術的進一步成熟,端到端系統有望在智能駕駛功能的落地和普及上取得突破。整車廠商和零部件供應商的協作將成為端到端架構發展的重要推動力,為智能駕駛領域帶來新的商業模式和市場機遇。同時,政策法規的完善和行業標準的制定將為端到端技術的商業化保駕護航,推動端到端系統的全面落地。
審核編輯 黃宇
-
AI
+關注
關注
87文章
30170瀏覽量
268428 -
端到端
+關注
關注
0文章
26瀏覽量
10546
發布評論請先 登錄
相關推薦
SDN中的端到端時延
從C端市場到B端市場 企業在激烈競賽中共同推動智能家居的加速落地

HDR Vivid端到端產業鏈加速構建
端到端模型卷入智駕圈 周光:今年上車!

周光:不是真“無圖”,談何端到端


廣汽豐田和Momenta共同打造端到端高階智駕系統
智駕進程發力?小鵬、蔚來端到端模型上車
端到端讓智駕強者愈強時代來臨?
智己汽車“端到端”智駕方案推出,老司機真的會被取代嗎?






 工商網監
工商網監
評論