 單片機pwm控制基本原理詳解
單片機pwm控制基本原理詳解
前言
PWM是Pulse Width Modulation的縮寫,它的中文名字是脈沖寬度調制,一種說法是它利用微處理器的數字輸出來對模擬電路進行控制的一種有效的技術,其實就是使用數字信號達到一個模擬信號的效果。這是個什么概念呢?我們一步步來介紹。
首先從它的名字來看,脈沖寬度調制,就是改變脈沖寬度來實現不同的效果。我們先來看三組不同的脈沖信號,如圖所示。
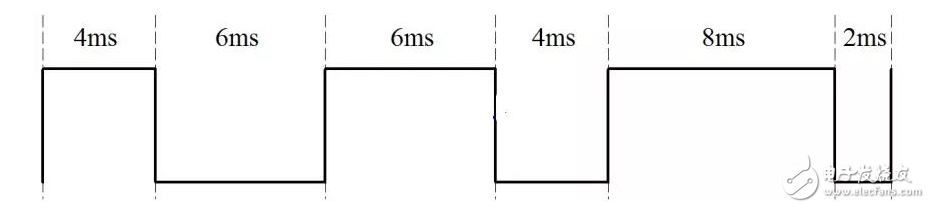
圖 10-1 PWM 波形
這是一個周期是 10ms,即頻率是 100Hz 的波形,但是每個周期內,高低電平脈沖寬度各不相同,這就是 PWM 的本質。在這里大家要記住一個概念,叫做“占空比”。占空比是指高電平的時間占整個周期的比例。比如第一部分波形的占空比是 40%,第二部分波形占空比是 60%,第三部分波形占空比是 80%,這就是 PWM 的解釋。
那為何它能對模擬電路進行控制呢?大家想一想,我們數字電路里,只有 0 和 1 兩種狀態,比如我們第 2 章學會的點亮 LED 小燈那個程序,當我們寫一個 LED = 0;小燈就會長亮,當我們寫一個 LED = 1;小燈就會滅掉。當我們讓小燈亮和滅間隔運行的時候,小燈是閃爍。
如果我們把這個間隔不斷的減小,減小到我們的肉眼分辨不出來,也就是 100Hz 以上的頻率,這個時候小燈表現出來的現象就是既保持亮的狀態,但亮度又沒有 LED = 0;時的亮度高。那我們不斷改變時間參數,讓 LED = 0;的時間大于或者小于 LED = 1;的時間,會發現亮度都不一樣,這就是模擬電路的感覺了,不再是純粹的 0 和 1,還有亮度不斷變化。大家會發現,如果我們用 100Hz 的信號,如圖 10-1 所示,假如高電平熄滅小燈,低電平點亮小燈的話,第一部分波形熄滅 4ms,點亮 6ms,亮度最高,第二部分熄滅 6ms,點亮 4ms,亮度次之,第三部分熄滅 8ms,點亮 2ms,亮度最低。那么用程序驗證一下我們的理論,我們用定時器T0 定時改變 P0.0 的輸出來實現 PWM,與純定時不同的是,這里我們每周期內都要重載兩次定時器初值,即用兩個不同的初值來控制高低電平的不同持續時間。為了使亮度的變化更加明顯,程序中使用的占空比差距更大。
#include
sbit PWMOUT = P0^0;
sbit ADDR0 = P1^0;
sbit ADDR1 = P1^1;
sbit ADDR2 = P1^2;
sbit ADDR3 = P1^3;
sbit ENLED = P1^4;
unsigned char HighRH = 0; //高電平重載值的高字節
unsigned char HighRL = 0; //高電平重載值的低字節
unsigned char LowRH = 0; //低電平重載值的高字節
unsigned char LowRL = 0; //低電平重載值的低字節
void ConfigPWM(unsigned int fr, unsigned char dc);
void ClosePWM();
void main(){
unsigned int i;
EA = 1; //開總中斷
ENLED = 0; //使能獨立 LED
ADDR3 = 1;
ADDR2 = 1;
ADDR1 = 1;
ADDR0 = 0;
while (1){
ConfigPWM(100, 10); //頻率 100Hz,占空比 10%
for (i=0; i40000; i++);
ClosePWM();
ConfigPWM(100, 40); //頻率 100Hz,占空比 40%
for (i=0; i40000; i++);
ClosePWM();
ConfigPWM(100, 90); //頻率 100Hz,占空比 90%
for (i=0; i40000; i++);
ClosePWM(); //關閉 PWM,相當于占空比 100%
for (i=0; i40000; i++);
}
}
/* 配置并啟動 PWM,fr-頻率,dc-占空比 */
void ConfigPWM(unsigned int fr, unsigned char dc){
unsigned int high, low;
unsigned long tmp;
tmp = (11059200/12) / fr; //計算一個周期所需的計數值
high = (tmp*dc) / 100; //計算高電平所需的計數值
low = tmp - high; //計算低電平所需的計數值
high = 65536 - high + 12; //計算高電平的重載值并補償中斷延時
low = 65536 - low + 12;//計算低電平的重載值并補償中斷延時
HighRH = (unsigned char)(high>>8); //高電平重載值拆分為高低字節
HighRL = (unsigned char)high;
LowRH = (unsigned char)(low>>8); //低電平重載值拆分為高低字節
LowRL = (unsigned char)low;
TMOD &= 0xF0; //清零 T0 的控制位
TMOD |= 0x01; //配置 T0 為模式 1
TH0 = HighRH; //加載 T0 重載值
TL0 = HighRL;
ET0 = 1; //使能 T0 中斷
TR0 = 1; //啟動 T0
PWMOUT = 1; //輸出高電平
}
/* 關閉 PWM */
void ClosePWM(){
TR0 = 0; //停止定時器
ET0 = 0; //禁止中斷
PWMOUT = 1; //輸出高電平
}
/* T0 中斷服務函數,產生 PWM 輸出 */
void InterruptTimer0() interrupt 1{
if (PWMOUT == 1){ //當前輸出為高電平時,裝載低電平值并輸出低電平
TH0 = LowRH;
TL0 = LowRL;
PWMOUT = 0;
}else{ //當前輸出為低電平時,裝載高電平值并輸出高電平
TH0 = HighRH;
TL0 = HighRL;
PWMOUT = 1;
}
}
需要提醒大家的是,由于標準 51 單片機中沒有專門的 PWM 模塊,所以我們用定時器加中斷的方式來產生 PWM,而現在有很多的單片機都會集成硬件的 PWM 模塊,這種情況下需要我們做的就僅僅是計算一下周期計數值和占空比計數值然后配置到相關的 SFR 中即可,既使程序得到了簡化又確保了 PWM 的輸出品質(因為消除了中斷延時的影響)。
大家編譯下載程序后,會發現小燈從最亮到滅一共 4 個亮度等級。如果我們讓亮度等級更多,并且讓亮度等級連續起來,會產生一個小燈漸變的效果,與呼吸有點類似,所以我們習慣上稱之為呼吸燈,程序代碼如下,這個程序用了 2 個定時器 2 個中斷,這是我們第一次這樣用,大家可以學習一下。我們來試試這個程序,試完了大家一定要能自己把程序寫出來,切記。
#include
sbit PWMOUT = P0^0;
sbit ADDR0 = P1^0;
sbit ADDR1 = P1^1;
sbit ADDR2 = P1^2;
sbit ADDR3 = P1^3;
sbit ENLED = P1^4;
unsigned long PeriodCnt = 0; //PWM 周期計數值
unsigned char HighRH = 0; //高電平重載值的高字節
unsigned char HighRL = 0; //高電平重載值的低字節
unsigned char LowRH = 0; //低電平重載值的高字節
unsigned char LowRL = 0; //低電平重載值的低字節
unsigned char T1RH = 0; //T1 重載值的高字節
unsigned char T1RL = 0; //T1 重載值的低字節
void ConfigTimer1(unsigned int ms);
void ConfigPWM(unsigned int fr, unsigned char dc);
void main(){
EA = 1; //開總中斷
ENLED = 0; //使能獨立 LED
ADDR3 = 1;
ADDR2 = 1;
ADDR1 = 1;
ADDR0 = 0;
ConfigPWM(100, 10); //配置并啟動 PWM
ConfigTimer1(50); //用 T1 定時調整占空比
while (1);
}
/* 配置并啟動 T1,ms-定時時間 */
void ConfigTimer1(unsigned int ms){
unsigned long tmp; //臨時變量
tmp = 11059200 / 12; //定時器計數頻率
tmp = (tmp * ms) / 1000; //計算所需的計數值
tmp = 65536 - tmp; //計算定時器重載值
tmp = tmp + 12; //補償中斷響應延時造成的誤差
T1RH = (unsigned char)(tmp>>8); //定時器重載值拆分為高低字節
T1RL = (unsigned char)tmp;
TMOD &= 0x0F; //清零 T1 的控制位
TMOD |= 0x10; //配置 T1 為模式 1
TH1 = T1RH; //加載 T1 重載值
TL1 = T1RL;
ET1 = 1; //使能 T1 中斷
TR1 = 1; //啟動 T1
}
/* 配置并啟動 PWM,fr-頻率,dc-占空比 */
void ConfigPWM(unsigned int fr, unsigned char dc){
unsigned int high, low;
PeriodCnt = (11059200/12) / fr; //計算一個周期所需的計數值
high = (PeriodCnt*dc) / 100; //計算高電平所需的計數值
low = PeriodCnt - high; //計算低電平所需的計數值
high = 65536 - high + 12; //計算高電平的定時器重載值并補償中斷延時
low = 65536 - low + 12; //計算低電平的定時器重載值并補償中斷延時
HighRH = (unsigned char)(high>>8); //高電平重載值拆分為高低字節
HighRL = (unsigned char)high;
LowRH = (unsigned char)(low>>8); //低電平重載值拆分為高低字節
LowRL = (unsigned char)low;
TMOD &= 0xF0; //清零 T0 的控制位
TMOD |= 0x01; //配置 T0 為模式 1
TH0 = HighRH; //加載 T0 重載值
TL0 = HighRL;
ET0 = 1; //使能 T0 中斷
TR0 = 1; //啟動 T0
PWMOUT = 1; //輸出高電平
}
/* 占空比調整函數,頻率不變只調整占空比 */
void AdjustDutyCycle(unsigned char dc){
unsigned int high, low;
high = (PeriodCnt*dc) / 100; //計算高電平所需的計數值
low = PeriodCnt - high; //計算低電平所需的計數值
high = 65536 - high + 12; //計算高電平的定時器重載值并補償中斷延時
low = 65536 - low + 12; //計算低電平的定時器重載值并補償中斷延時
HighRH = (unsigned char)(high>>8); //高電平重載值拆分為高低字節
HighRL = (unsigned char)high;
LowRH = (unsigned char)(low>>8); //低電平重載值拆分為高低字節
LowRL = (unsigned char)low;
}
/* T0 中斷服務函數,產生 PWM 輸出 */
void InterruptTimer0() interrupt 1{
if (PWMOUT == 1){ //當前輸出為高電平時,裝載低電平值并輸出低電平
TH0 = LowRH;
TL0 = LowRL;
PWMOUT = 0;
}else{ //當前輸出為低電平時,裝載高電平值并輸出高電平
TH0 = HighRH;
TL0 = HighRL;
PWMOUT = 1;
}
}
/* T1 中斷服務函數,定時動態調整占空比 */
void InterruptTimer1() interrupt 3{
static bit dir = 0;
static unsigned char index = 0;
unsigned char code table[13] = { //占空比調整表
5, 18, 30, 41, 51, 60, 68, 75, 81, 86, 90, 93, 95
};
TH1 = T1RH; //重新加載 T1 重載值
TL1 = T1RL;
AdjustDutyCycle(table[index]); //調整 PWM 的占空比
if (dir == 0){ //逐步增大占空比
index++;
if (index >= 12){
dir = 1;
}
}else{ //逐步減小占空比
index--;
if (index == 0){
dir = 0;
}
}
}
呼吸燈效果做出來后,利用這個基本原理,其它各種效果的燈光閃爍都應該可以做出來,大家看到的 KTV 里邊那絢麗的燈光閃爍,其實就是采用的 PWM 技術控制的。
原文標題:單片機pwm控制基本原理詳解
文章出處:【微信號:changxuemcu,微信公眾號:暢學單片機】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
MCS-51系列單片機的基本原理
PIC16F15323單片機的基本原理是什么
PIC16F15323單片機的基本原理
MCS-51 單片機基本原理
淺析單片機中PWM的基本概念和基本原理
單片機pwm控制基本原理詳解

單片機pwm控制基本原理詳解





 工商網監
工商網監
評論