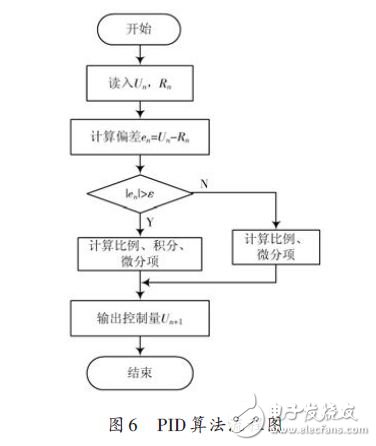
 最簡單的單片機PID控制算法程序
最簡單的單片機PID控制算法程序
/*************定義全局變量*****************/
uchar Kp,TI,Td
int Set_speed;
/*************PID初始化函數***************/
void PID_init(void){
Serror=0;
FError=0;
Kp=30;
TI=500;
Td=10;
}
int PID_control(int Now_speed)
{
int Error,Serror,result;
Error=Now_speed-Set_speed;
Serror=Serror+Error;
result=(Kp*Error+Kp*0.05/TI*Serror+Kp*Td/0.05*(Error-FError));
FError=Error;
//對占空比進行限幅處理
if(result《10)
{result=0;} else
if(result》1000)
{result=1000;}
return result;
}
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
單片機
+關注
關注
6032文章
44525瀏覽量
633259 -
PID
+關注
關注
35文章
1471瀏覽量
85306
原文標題:最簡單的單片機PID控制算法程序
文章出處:【微信號:changxuemcu,微信公眾號:暢學單片機】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
單片機的PID控制算法
我國提出了中國制造2025。目前企業工業自動化的水平已經成為現代化水平的一個主要衡量指標。PID控制器的特點是結構簡單、應用廣泛、完全擺脫了精確模型的限制,這樣就能解決在工業過程中需要精確建模的困難。那么,基于
發表于 01-27 11:04
?3次下載
基于單片機的水溫控制系統設計的合集包括程序PID控制算法和參數整定
本系統設計采用基于PID算法的單片機控制來實現水溫的調控。單片機控制部分采用AT89C51
發表于 06-08 08:00
?140次下載
使用單片機和Arduino實現增量式PID位置式PID算法和PID庫免費下載
本文檔的主要內容詳細介紹的是使用單片機和Arduino實現增量式PID位置式PID算法和PID庫免費下載。
發表于 05-28 16:30
?68次下載





 工商網監
工商網監
評論