 二到四線轉換器連接至全雙工總線注意要點
二到四線轉換器連接至全雙工總線注意要點
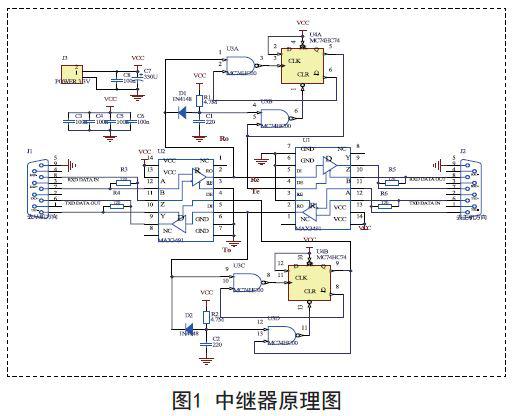
多點數據通信網絡,例如:Profibus、Modbus 和 BACnet 等通常均要求具備 RS-485 雙線、半雙工總線系統與四線、全雙工總線系統通用性。這些系統可以擴展至數百米長,并承受較大的接地電位差 (GPD)。這些電位差會超出收發器的共模電壓范圍,對器件造成損壞。為了消除 GPD,我們利用電隔離型收發器,將總線節點的控制電子組件隔離于連接總線的實際收發器級。圖 1 顯示了使用 2-4 線轉換器的混合網絡的結構圖。
圖 1 2-4 線轉換器可確保半雙工系統和全雙工系統之間的通用性
為了使轉換器運行不依賴于數據速率,我們通過總線的邏輯狀態來控制轉換器驅動器和接收器的開啟和關閉。總線驅動是以每比特間隔,從而讓轉換器運行獨立于信號數據速率。
簡單的控制邏輯可確保驅動器 D1 和 D2 僅由相反接收器(也即 R1 或者 R2)輸出的邏輯低激活啟用。因為接收器輸入端存在 VFS > 200 mV 的總線故障保護電壓,所以在總線閑置期間,兩個接收器輸出均為邏輯高。逆變器柵極將該邏輯高電平反向為低態,并在關閉驅動器的同時啟用接收器。
在半到全雙工方向(圖 2:自左向右),R1 輸入端的負總線電壓激活驅動器 D2,并對驅動器輸入使用低態。D2 通過以一個負輸出電壓驅動傳輸總線來做出相應的響應。當 R1 輸入的總線電壓變為正時,D2 立即失效。但是,它的輸出卻為高電平,原因是故障保護偏置電阻器 RFS 形成總線電壓 VFS。
(請注意,在整個運行期間,R2 的輸出始終保持高電平,確保 R1 保持有效而 D1 保持無效。)
圖 2 半雙工到全雙工方向的轉換器時序
在全到半雙工方向(圖 3:自右向左),R2 輸入端的負總線電壓激活驅動器 D1,并給驅動器輸入施加低態。D1 通過以一個負輸出電壓驅動雙線總線做出相應的響應。當 R2 輸入的總線電壓變為正時,D1 經一段延遲時間后失效。在該延遲時間內,D1 在出現高阻抗前使用一個負電壓驅動總線,以防止 R1 輸出端出現開關瞬態。
我們建議,RD?CD 時間常量產生的最小延遲時間應為驅動器最大傳播延遲的 1.3 倍,以補償組件值、逆變器閾值和電源電壓的容差。在給定的電容條件下,可通過方程式 1 確定要求的 RD 值:
方程式 1
其中,tPLH-max 為驅動器 D2 的最大低到高傳播延遲,VIT+ min 為施密特觸發逆變器的最小正輸入閾值,而 VCC-max 為最大供電電壓。
在 D1 失效以后,因為有故障保護偏置電阻器 RFS 形成的總線電壓 VFS其輸出仍為高電平。當 R2 輸入端的總線電壓恢復負時,由于 CD 通過放電二極管 DD 快速放電D1 立即被激活。圖 3 所示時序圖顯示,半雙工總線上一個遠程接收器(此處以 R 表示),將負總線電壓轉換為一個低比特。一個高比特由一個低主驅動正總線電壓和剩余故障保護電壓 VFS 組成。
圖 3 全雙工到半雙工方向的轉換器時序
兩個轉換器端口的收發器級均要求所使用的隔離式電源 VISO-1 和 VISO-2須來自中央 3.3V 電源。圖 5 為其原理圖。為了避免無負載狀態期間出現輸出峰值要求,每個整流輸出均包括一個大小為 2 kΩ 的最小負載電阻器。
圖 5 VISO-1 和 VISO-2 的隔離式電源設計
總結
二到四線轉換器可用于將一個單半雙工收發器或者一條完整的半雙工總線,連接至一個全雙工總線。在將二到四線轉換器連接至全雙工總線時,必須注意的是,在與轉換器節點通信時,主控節點的微控制器會改變其全雙工到半雙工的傳輸格式。
-
收發器
+關注
關注
10文章
3338瀏覽量
105539 -
轉換器
+關注
關注
27文章
8505瀏覽量
145983 -
RS485
+關注
關注
39文章
1127瀏覽量
81769
發布評論請先 登錄
相關推薦

全雙工與半雙工的區別 主要是自己學習下
電阻的四線制接法(開爾文四線檢測)
MIKROE-2821,適用于使用四線總線遠距離傳輸較小的數據塊,從而實現全雙工通信
四線制的稱重傳感器怎么和儀表連接
簡要說明四線SPI接口應用中需要掌握的一些關鍵知識
SPI總線全雙工通信主設備配置
用于RS485全雙工的LPUART,以半雙工方式連接時出現回聲怎么解決?
全雙工,全雙工是什么意思
四線制全雙工RS-485中繼器的設計及應用優勢
物位開關中的二線制與四線制是什么意思
ZLG致遠電子新一代車載以太網全雙工物理層轉換器發布






 工商網監
工商網監
評論