") 一種可提升峰值電流模式控制性能應(yīng)用方案
一種可提升峰值電流模式控制性能應(yīng)用方案
最糟糕的設(shè)計(jì)方案通常會(huì)在最低輸入電壓下產(chǎn)生最大輸出功率。而在現(xiàn)實(shí)情況中,高輸入線路的最大功率可能是最低輸入線路電壓所輸送功率的兩倍。這會(huì)迫使電源設(shè)計(jì)人員必須對(duì)功率級(jí)進(jìn)行過(guò)量設(shè)計(jì)。本文將探討輸入功率增加的原因以及降低方法。此外,還將介紹一種可提升峰值電流模式控制性能的創(chuàng)新方法。
反向轉(zhuǎn)換器變壓器基本上由兩個(gè)耦合電感器組成。當(dāng)主開關(guān)接通期間,電能被儲(chǔ)存在主耦合電感器中。由于變壓器具有一次繞組和二次繞組配置,因而當(dāng)主開關(guān)接通時(shí),輸出二極管 (D1) 會(huì)被反向偏置(圖 1a–1b)。當(dāng)主開關(guān)斷開時(shí),會(huì)將儲(chǔ)存在主耦合電感器中的電能傳送到輸出耦合電感器中,作為驅(qū)動(dòng)負(fù)載的能量。反向變壓器能對(duì)輸出電壓進(jìn)行升壓或降壓轉(zhuǎn)換,并提供輸入到輸出的隔離。
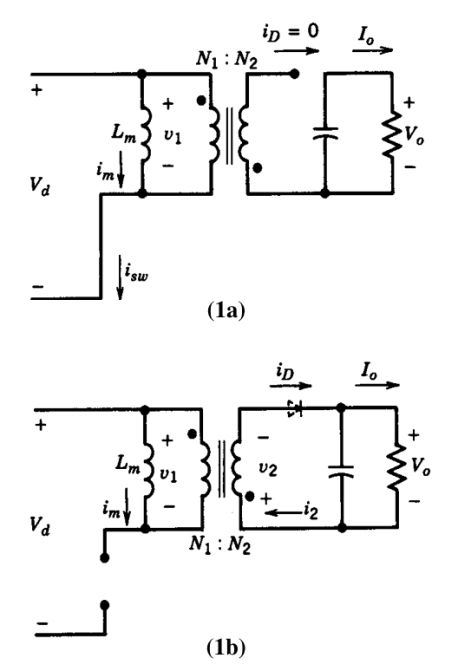
圖 1.1a) 主耦合電感器中存儲(chǔ)的電能;1b)電能傳送至二次繞組
峰值電流模式控制
出于對(duì)成本和簡(jiǎn)約性的考慮,反向轉(zhuǎn)換器通用采用峰值電流模式控制,因而不能直接測(cè)量輸出電流。當(dāng)反向轉(zhuǎn)換器出現(xiàn)過(guò)載故障時(shí),輸出電壓就會(huì)下降。這樣,反饋補(bǔ)償電壓就會(huì)升高至脈寬調(diào)制 (PWM) 控制器限流閥值之上,而且 PWM 會(huì)在逐脈沖過(guò)限流限制 (pulse-by-pulse current limit) 模式下運(yùn)行,這時(shí)反饋電壓不再控制 PWM 占空比。當(dāng)峰值主電流超過(guò) PWM 控制器限流比較器電壓參考值 (VCS) 時(shí),終止占空比。
峰值電流模式控制面臨的挑戰(zhàn)
當(dāng)控制器處于逐脈沖過(guò)限流限制模式下時(shí),主開關(guān)無(wú)法即時(shí)關(guān)閉。在 PWM 和功率級(jí)內(nèi)存在傳播延遲,其中包括控制器的前沿消隱 (LEB),在限流比較器、邏輯電路、柵極驅(qū)動(dòng)器中的傳播延遲,以及功率 MOSFET 的關(guān)閉延遲。傳播延遲會(huì)導(dǎo)致峰值主電流因過(guò)沖而高于預(yù)期值。
方程式 1 計(jì)算實(shí)際峰值主電流:
(1)
計(jì)算出峰值主電流后,我們可用方程式 2 來(lái)計(jì)算輸入功率:
(2)
這些傳播延遲可以長(zhǎng)達(dá)數(shù)百納秒。我們能使用方程式 3 來(lái)計(jì)算主電流的斜率,其中 VIN 為整流直流線路電壓,LP 為變壓器的初級(jí)電感,dt 為總傳播延遲。

(3)
若傳播延遲 (方程式 3中的 dt)保持不變,那么當(dāng) VIN 增大時(shí),主電流斜率也會(huì)相應(yīng)增大。由于存在傳播延遲,最大 VIN 下的峰值電流會(huì)因過(guò)沖而高于最小 VIN 下的峰值電流(圖 2)。
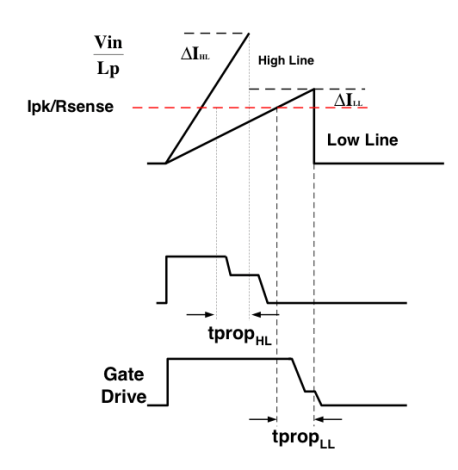
圖 2.傳播延遲與 VIN 的關(guān)系
結(jié)果是輸入和輸出功率隨著輸入線路電壓的增大而增大。可舉例說(shuō)明這一問(wèn)題。峰值主電流(方程式 4)能根據(jù)如下系統(tǒng)要求得出:
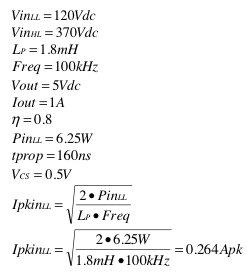
(4)
對(duì)于峰值電流模式控制,我們能在計(jì)算峰值電流后確定電流感應(yīng)電阻值大小(方程式 5)。
(5)
VCS 為 PWM 限流比較器電壓參考 (0.5V)。最小輸入電壓下的峰值電流過(guò)沖是:
在最大輸入線路電壓下,峰值電流是(方程式 6):
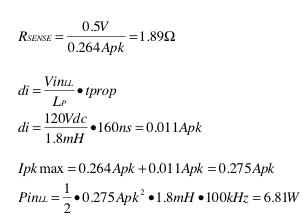
(6)
-
電感器
+關(guān)注
關(guān)注
20文章
2323瀏覽量
70413 -
反向轉(zhuǎn)換器
+關(guān)注
關(guān)注
0文章
8瀏覽量
7986
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
掃描速率與峰值電流和峰值電勢(shì)的關(guān)系
峰值電流模式降壓LED驅(qū)動(dòng)器應(yīng)用的環(huán)路響應(yīng)考慮

PCM(峰值電流模式)降壓轉(zhuǎn)換器中的功率級(jí)增益和斜率補(bǔ)償測(cè)量
利用TMS320F2803x實(shí)現(xiàn)帶斜坡補(bǔ)償?shù)臄?shù)字峰值電流模式控制
伺服電機(jī)常用的三種控制模式有哪些
多模式 PFC + 電流模式 LLC 組合控制器
TIDM-02000-使用 C2000? 實(shí)時(shí) MCU 的峰值電流模式控制相移全橋 PCB layout 設(shè)計(jì)
電機(jī)控制調(diào)試時(shí)想要精確調(diào)試控制性能如何觀測(cè)變量的波形?
如何去提升機(jī)械臂的位置控制性能?

如何去提升機(jī)械臂的位置控制性能

浪涌電流、峰值電流和穩(wěn)態(tài)電流之間的差異
三種開關(guān)電源峰值電流測(cè)試方法分享
平均電流控制和峰值電流控制的區(qū)別
在CCM下運(yùn)行的離線反激式轉(zhuǎn)換器中峰值初級(jí)電流控制設(shè)計(jì)實(shí)現(xiàn)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論