 FANUC工業機器人碼垛編程詳解!
FANUC工業機器人碼垛編程詳解!
1.碼垛功能的定義
對幾個具有代表性的點進行示教,即可以從下層到上層按照順序堆疊工件。
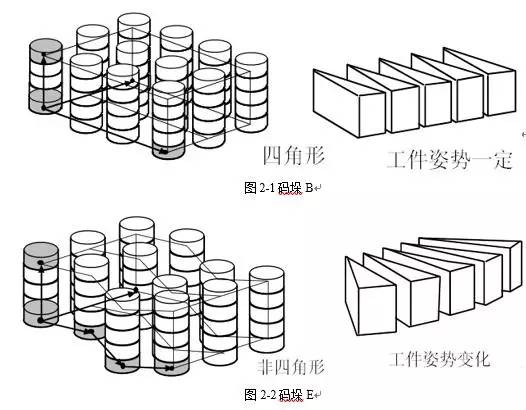
2.碼垛的種類
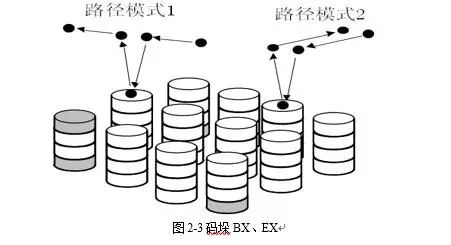
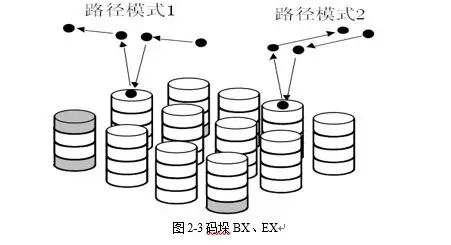
碼垛 B:包括碼垛B(單路徑模式)和碼垛BX(多路徑模式) 適用于工件姿勢恒定,堆疊時的底面形狀為直線或四角形。 碼垛 E:包括碼垛E(單路徑模式)和碼垛EX(多路徑模式)適用于復雜的堆疊模式(工件姿勢改變,堆疊時的底面形狀不是四角形)。
3.碼垛指令
(1)碼垛指令格式:碼垛指令基于碼垛寄存器的值,根據堆疊模式計算當前 的堆疊點位置,并根據路徑模式計算當前的路徑,改寫碼垛動作指令的位置 數據。

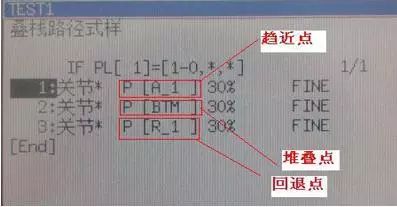
(2)碼垛動作指令:以使用具有趨近點、堆疊點、回退點的路徑點作為位置 數據的動作指令,是碼垛專用的動作指令。該位置數據通過碼垛指令每次都 被改寫。

(3)碼垛結束指令:計算下一個堆疊點,改寫碼垛寄存器的值。

(4)碼垛寄存器:用于碼垛的控制。進行堆疊點的指定、比較、分支等。

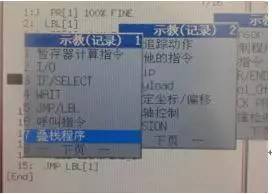
4.碼垛示教
(1)選擇碼垛程序
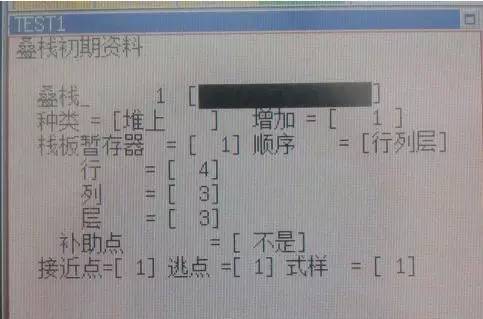
(2)輸入堆棧初始數據
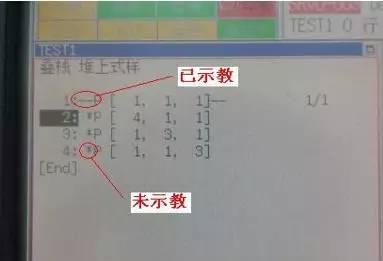
(3)示教堆上樣式
(4)示教路徑模式
5.碼垛作業課題演示
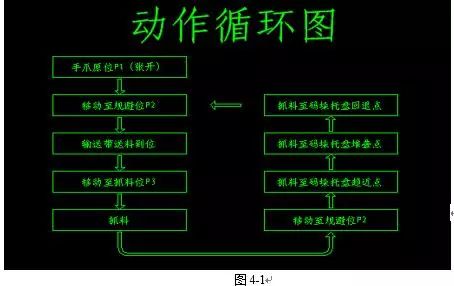
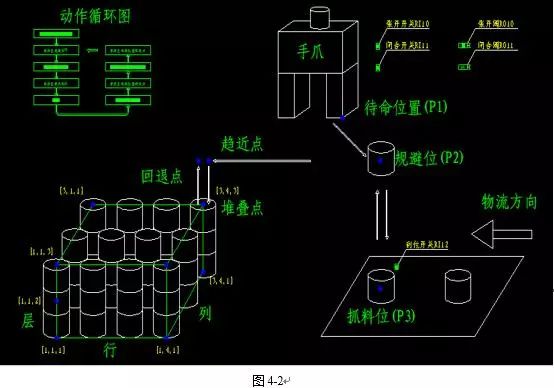
如圖 4-1、4-2 所示動作循環,在輸送帶 P3 出進行工件抓取,在托盤上進行 碼垛。
用示教器編寫程序,程序如下:
1:J PR[1] 100% FINE ;移動至待命位置 P1
2:LBL[1] ;標簽 1
3:J PR[2] 100% FINE ;移動至待命位置 P2
4:WAIT RI[12]=ON ;等待抓料位有料
5:L PR[3] 100mm/sec FINE ;移動至抓料位 P3
6:WAIT 1.00(sec) ;等待 1S
7:RO[11]=ON ;抓手閉合閥 ON
8:WAIT RI[11]=ON ;等待抓手閉合開關 ON
9:RO[11]=OFF ;抓手閉合閥 OFF
10:PALLETIZING-B_1
11:J PAL_1[A_1] 80% FINE ;移動至趨近點
12:L PAL_1[BTM] 100mm/sec FINE ;移動至堆疊點
13:RO[10]=ON ;抓手張開閥 ON
14:WAIT RI[10]=ON ;等待抓手張開開關 ON
15:RO[10]=OFF ;抓手張開閥 OFF
16:L PAL_1[R_1] 100mm/sec FINE ;移動至回退點
17:PALLETIZING-END_1
18:JUMP LBL[1] ;跳轉至標簽 1
6. 注意事項
(1) 要提高碼垛的動作精度,需要正確進行 TCP 的設定。
(2) 碼垛寄存器,應避免同時使用相同編號的其他碼垛。
(3) 碼垛功能,在三個指令也即碼垛指令、碼垛動作指令、碼垛結束指令 存在于一個程序而發揮作用。即使只將一個指令復制到子程序中進行 示教,該功能也不會正常工作,應與注意。
(4) 碼垛編號,在示教完碼垛的數據后,隨同碼垛指令、碼垛動作指令、 碼垛結束指令一起被自動寫入。不需要在意是否在別的程序中重復使 用著碼垛編號(每個程序都具有該碼垛編號的數據)。
(5) 在碼垛動作指令中,不可在動作類型中設定“C”(圓弧運動)
-
寄存器
+關注
關注
31文章
5321瀏覽量
120016 -
工業機器人
+關注
關注
91文章
3352瀏覽量
92562 -
Fanuc
+關注
關注
18文章
117瀏覽量
36600
原文標題:FANUC工業機器人碼垛編程詳解!
文章出處:【微信號:GKB1508,微信公眾號:工控幫】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論