 LoRaWAN定位的技術要點及定位的應用案例
LoRaWAN定位的技術要點及定位的應用案例
白皮書介紹
LoRaWAN?可以為低功耗廣域網提供定位解決方案,為一系列電池供電的應用終端提供所需的位置信息。任何正在工作的LoRaWAN終端都支持定位功能,而不需要增加額外的BOM成本,并且不需要額外的處理能力。
適讀群體
這篇白皮書的讀者是打算開發定位功能應用的LoRaWAN服務提供商、企業和終端設備制造商。本文將闡述LoRaWAN定位的技術要點,重點突出適合于LoRaWAN 定位的應用案例,并提供幾個部署的研究案例。
定位技術比較
LoRaWAN TDOA/RSSI
? 成本最低的方案,任何LoRaWAN終端都生來具備;
? LoRaWAN支持長電池壽命應用的案例;
? TDOA:視情況而定的定位精確度為20-200m;
? RSSI: 1000-2000m的定位精確度;
WiFi 定位
?室內、外定位的高效解決方案
?精確度隨著熱點密度的增加而提高
BLE
?需要BLE信標系統
?室內定位方案
GPS/AGPS
?一個GPS的BOM成本是5-10美元
? 最精確但最耗電的方案
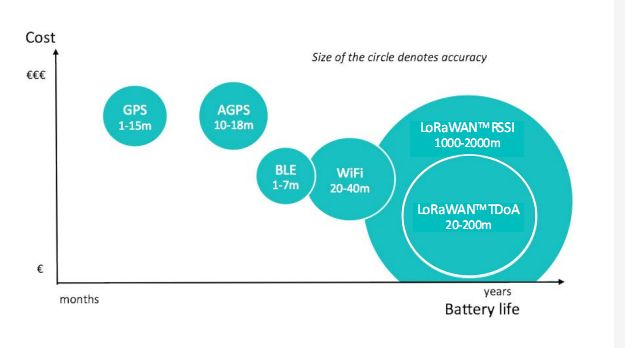
(圖3.1 定位技術的比較)
上邊的圖片直觀的展示了幾種定位技術成本、準確性、功耗等方面的對比。
如上圖所示,LoRaWAN協議提供了兩種定位方法:基于接收信號強度指示(RSSI)的定位,用于粗定位;到達時間差(TDOA)定位,用于精準定位。本文將討論TDOA定位,因為這種方案更適用于需要低功耗、電池供電設備的場景,定位精度范圍是20-200米。
具有清晰的視距和推薦網關部署策略的郊區部署將在低部署規模情況下獲得高的精確度。城市和密集的城市環境中多路徑問題將會影響定位精度。所以一般來說,隨著網關網絡密度的增加定位精度也會提高。
一般來說,不需要頻繁定位的終端能夠獲得最佳的電源效率。這些設備通常被設定為固定或者不經常移動的Class A終端。
這些終端的定位信息不需要增加額外的硬件成本。移動的終端需要更頻繁的位置信息,它們會傳輸更多的數據幀、會消耗更多的電量、會增加硬件成本(如電池),這些終端通常會被設定為Class B 或者 Class C。使用更高的數據速率(例如SF7)有助于限制增加的電量需求。
本文的重點是室外、廣域的定位。需要注意的是,LoRaWAN圈內正在使用各種方案提供了室內精度10米甚至更好地定位精度(網關密度100米,改進的時鐘源,等)。這可以比擬定位精度1-3米的室內WiFi到達角(AOA)定位技術。
LoRaWAN定位能力
本節將提供了LoRaWAN TDOA定位和影響精度誤差的理論概述。
1
架構
當一個LoRaWAN終端的上行數據被三個或三個以上基站接收到,那么它就可以被定位。這些上行數據并不需要是特定的位置信息,它們可以普通的LoRaWAN數據幀結構。多個基站同時接收到相同的上行數據,則終端的位置信息就可以通過多點定位技術得到。下圖是多點定位的過程示意圖。

(圖4.1 定位架構圖)
這里不需要額外的硬件支撐。但是基站確實需要精確地時間同步,現階段這是通過基站內部的GPS實現的(或者任何可以在幾十納秒時間內與基站時鐘進行同步的手段)。每個被接收到的上行幀都會獲得網關精確的時間戳。這個時間戳將作為幀結構的一部分被轉發到網絡服務器,其中還包括了信號電平、信噪比和頻率誤差。
網絡服務器將對同一個數據幀的多個接收進行排序,將所有包含該幀數據時間戳的元數據進行分組,并從定位解算器請求一個定位計算。在一個給定的幀結構中,基本的定位解算函數將計算不同基站接收的時間差,然后通過這個時間差可以測算出終端設備到不同基站的距離。
一旦兩個基站的TDOA已知,那么這個終端的位置就可以被放在一個雙曲線中。通過多次時間差的計算,終端的位置信息就可以呈現在多個雙曲線上,那么最終這個終端的位置就應該在這些雙曲線的交點處。
定位的精確度與以下幾個因素有關:
傳播環境和路徑
網關部署策略和密度
用于定位的算法
網關時間同步的精度
終端設備的動態和結構
2
傳播誤差的影響
在一個多路徑環境中,LoRaWAN 定位的性能受到網關時鐘精度的限制。當信號的靈敏度為25dB時,定位測試通常能達到超過3m的精度。在靈敏度水平上,噪音可使精確度下降到60m。
在這些約束條件下,精度很少依賴于接收到的信號電平。在多路徑的情況下,由于系統帶寬被限制為125 KHz,信號路徑通常難以區分,只有平均信道延遲可以估計。在某些情況下,直接信號路徑不存在,由于只能看到反射路徑,所以將延遲偏移量引入到幀時間戳中。
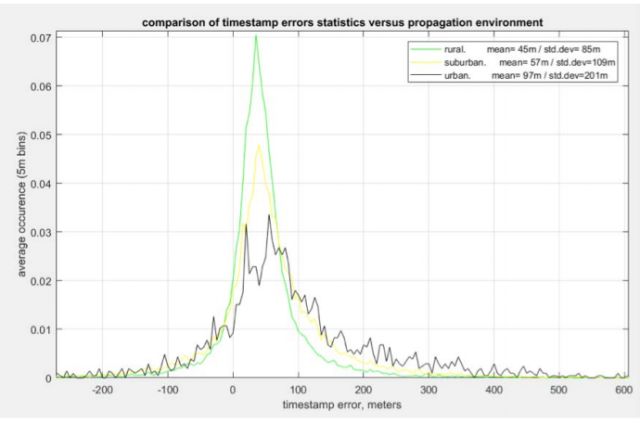
(圖4.2 時間戳誤差的統計)
圖4-2顯示了不同傳播場景下時間戳誤差的統計數據。這些測量數據從移動車輛測試中獲得,并使用GPS估算時間戳誤差。城市場景比其他場景數據點少(2000對比10000),這也解釋了為什么代表城市的曲線長得“更難看”。從車輛到網關的平均距離為1.5km。
總體來說,時間戳總是滯后的。要注意,時間戳誤差可能是負的,但它們永遠不會小于-1/帶寬(絕不低于系統的基本分辨率)。我們可以利用偏差將時間戳誤差分類,這個偏差就是平均誤差,并在這個平均值附近傳播。隨著傳播環境惡劣,偏差增大,傳播變寬。
有多種方法可以減少時間戳誤差:
? 在不同的頻點下重復幀
? 增加基站的天線(通常是兩個)
? 增加網關部署的密度,可增加可用樣本的數量和視距測量的機會,從而提高TDOA的準確性
? 降低基站的延遲幀的時間戳
? 引入帶外傳播誤差修正,以減輕多路徑(模擬,預測,校準或指紋識別)
定位求解器的設計的目的是為了減少多路徑。求解器將選擇進行處理的時間戳的隊列集,而忽略剩余的。然后求解器通過數據的求解,得到終端設備的位置。多路徑傳播從根本上限制了系統的精確度,但基站部署策略也起著重要的作用。
3
部署策略的影響
和其他無線電系統一樣(例如GPS,LORAN)LoRaWAN定位的精確性取決于網關與終端設備的位置關系。用于確定網關部署質量的指標是幾何精度因子(Geometric Dilution Of Precision,GDOP),這是對接收網關相對幾何的“優勢”的度量。
每一次由定位求解器計算的差異定義了一個雙曲曲線。雙曲線是開放的曲線,所以當終端設備相對于基站處于不合適的位置時,雙曲線的交叉會導致誤差放大。
GDOP可以捕獲這個誤差的放大系數,它只依賴于基站和終端設備的幾何位置關系。對于二維坐標內的定位,我們引入水平DOP (HDOP,水平精度因子)。當HDOP是1時,代表沒有誤差放大;如果基站顯示了一個時間戳60m(即200ns)的不確定性,那么最終定位的不確定性就是60m。當HDOP是2時,最終的不確定性就是120m。當基站部署密度很高,HDOP也可以低于1。
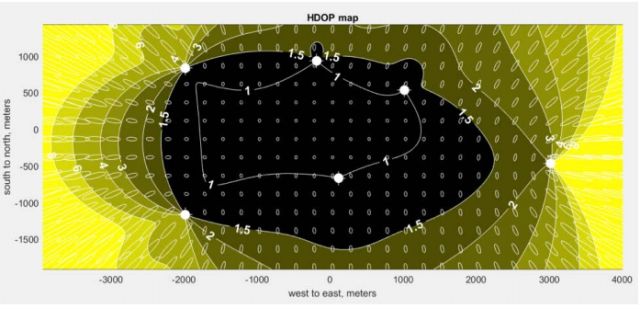
(圖4.3 HDOP 地圖)
圖4-3模擬6個基站部署的HDOP地圖。圖中點代表網關,等高線區域為HDOP顯示區。
中間區域,HDOP大于1并一直向兩側增大到大于8。在由網關組成的多邊形之外區域,HDOP的增長非常快。而高HDOP大大降低了定位的準確性。
在常規空間中的白色不確定區域,既描述了位置誤差的振幅,也描述了誤差的方向(沿徑向指向多邊形的中心)。請注意地圖的東側,即使是在網關多邊形區域中,HDOP也會帶著較大的誤差沿著南北軸達到2。這是由于沿該軸的網關密度較低。
這里需要提到的是,并不是基站的位置越近,定位效果就越好;最重要的是基站位置布局策略。與矩形的中間相比,在四個網關構成的正方形中間位置的定位精度會更好。
在覆蓋多邊形之外的糟糕表現應該是部署策略的問題。所以對于小規模或試點定位部署,強烈建議引入HDOP并進行網關位置選擇優化。
4
時間誤差的影響
GPS的接收質量同樣也會影響精度。對于移動服務提供商來說,靠近手機站點的基站可能會經歷周期性的GPS阻塞,因此必須使用特殊的天線。
在城市中低矮的屋頂或廣告牌上安裝的基站也會受到較少衛星的“城市峽谷”效應的影響。當GPS接收質量良好時,時基誤差大約為25ns (<10m)。GPS并不是主要的誤差來源,因為部署精度無法達到10m。但是在部署非常密集的LoRaWAN網絡中,提高網關時鐘精度可以進一步提高定位的精確度。
5
濾波提高定位精度
根據應用的不同,可以對定位求解器的輸出結果進行濾波以獲得更好的精確度。例如,如果已知終端設備位置固定,則可利用求解時間平均值來推導位置。卡爾曼濾波是一種通用的技術,可以從噪聲觀測中估測位置和速度(大多數定位系統使用的是卡爾曼模型)。
回到LoRaWAN 定位,由于預濾波的位置估計值是稀疏且有噪聲的,所以濾波對定位性能有很大的影響。如果濾波器可以利用一個特定的終端設備的速度配置文件,就可以提高定位的精度。這些配置信息來源于終端本身(固定、移動等等),并且是特定應用指向的。
另外一個特定應用的用途是匹配濾波。例如,如果終端設備在倉庫之間移動,過濾器首先將終端設備分為靜止的或移動的。如果它是靜止的,則可以認定它位于某個倉庫中。如果它在移動,則它位于某條路徑上。
對于低功耗的優化,LoRaWAN占空比在某些地區會有限制,這樣一來終端設備每天只能傳輸有限數量的幀數。這種限制是LoRaWAN通信限制的一個方面,并不是特定于定位場景。實際中固定的設備比運動更容易定位,因為因為一些幀的數據可以更容易利用來過濾位置估計。
部署案例研究
1
巴塞羅那港口(Actility/Cisco)
LoRaWAN定位的一個例子是車輛定位。利用GPS來定位車輛已經有多年的歷史。但是由于安裝的復雜性和成本問題,并沒有廣泛推開。由于GPS定位都十分耗電,需要與電池連接。現在基于LoRaWAN TDOA定位,是新一代低功耗定位方案,已經可用。
在2017年的全球移動大會上,Actility和Cisco在ZAL港安裝了6個IR829/IXM LoRaWAN網關,實現了ZAL港的專用LoRaWAN網絡覆蓋。ZAL管理系統可為港口內的公司提供安全、運維以及日常服務。
網絡覆蓋了港口內0.43平方公里的面積,6個網關間隔400~600米以確保良好的網絡覆蓋性。三層樓的金屬建筑區域內并沒有專門可以放置天線的高點,所以天線被直接安裝在屋頂(次優配置)。
Abeeway定位終端安裝在管理車輛上。定位終端在LoRaWAN TDOA模式下工作是最節能的定位方式。如果對于功耗方面考慮較少,使用LoRaWAN 上行來輔助GPS上報定位數據可用于需要更高精度的場景(10m內的精度)。
與典型的AGPS/GSM定位終端相比,LoRaWAN定位終端節省了50%以上的電能。并且由于是電池供電且無需其他電源,終端的安裝十分簡便,只需用膠粘、螺絲固定或者其他簡單手段固定在車上。同時使用APP來實時監控ZAL港的在線車輛運行情況。
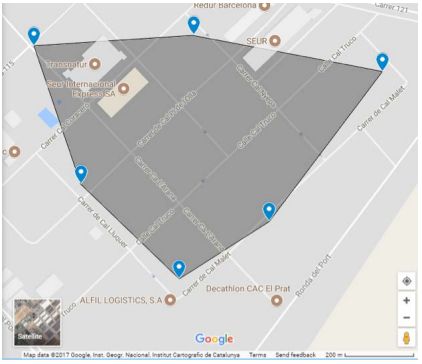
(圖5.1 巴塞羅那ZAL港基站位置示意圖)
在ZAL港口的案例中,應用程序會計算每輛車在經過每個建筑花費的時間(如,它停了多久)。物流區域的建筑通常比較稀疏,車輛停放的位置距離建筑物要大于80米,大多數車輛停放的時間在20分鐘到12小時不等。停放車輛的追蹤是TDOA定位的一個主要應用,定位終端每10分鐘上報一次位置信息,可以得到60-80m的定位精度。當車輛靜止時,定位求解器會對多個幀的數據進行平均,當車輛重新開始移動時候能夠及時監測到。圖5-2顯示了固定車輛的位置精度。
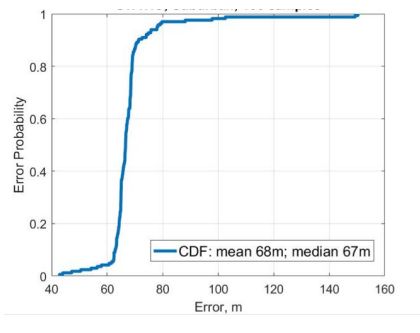
(圖5.2 ZAL港口TDOA定位精度:固定車輛)
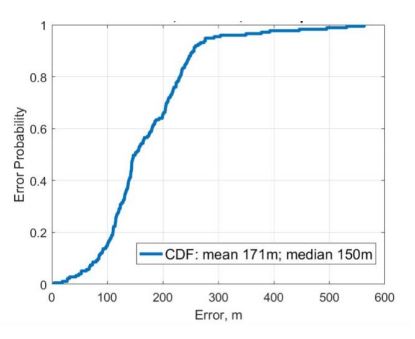
移動車輛的近似實時位置也可以通過TDOA進行定位。通過我們的測試一個移動的車輛可以被定位到的平均精度是171米。這足以判斷車輛行駛的大致方向,以便了解它是否正在前往下一個地點,或在一天結束后返回停車點。
在這個案例中,定位精度并不是那么重要,因為定位信息在這里主要用于當車輛進出指定區域進行觸發警報。圖5-3顯示了移動車輛的定位精度。
(圖5.3 ZAL港口TDOA定位精度:移動車輛)
2
伊西萊穆利諾/布倫(Actility/Cisco)
思科和Actility在巴黎地區部署了5個IXM LoRaWAN網關以驗證LoRaWAN定位能力。網絡覆蓋了伊西萊穆利諾和布倫的城區。基站采用了以太網或者移動網絡進行數據回傳,測試系統24小時運行,靜止和移動測試節點能夠生成用于定位應用開發的消息。
網絡覆蓋區域面積大概為1.6平方公里,四個基站間隔為900米至1300米,構成一個五角形區域,部署在布倫的第五個基站會應用在未來的測試中。該區域包括商業、市政和住宅,以及更開放的用地,如塞納河、公園和體育場。天線安裝在60m到126m的高度。
高點部署(如圖5-4所示)可提供長距離覆蓋,但地面覆蓋效果有時也會受到影響。由于多山的地形,如要保證最佳的定位能力還需要增加基站的部署(每個定位終端的數據至少要被三個基站接收)。
(圖5.4 伊西萊穆利諾/布倫網關部署示意圖)
固定資產定位使用Adeunis V2測試設備進行,每20秒發送一次上行數據。每八個上行數據構成一個定位“幀”。定位終端配置一個“固定”的配置文件,支持自適應數據率。
在由網關相互連接構成的區域中(HDOP較好),定位精度可達到75-115m(近似標準偏差為25m)。在區域外圍,定位精度是400m(HDOP較差)。這些結果與巴塞羅那ZAL港口的測試發現一致。圖5-5提供了一個典型的定位圖。其他的網關部署策略、固定和移動終端的測試還在進行中。
(圖5.5 巴黎定位案例示意圖)
3
納沙泰爾(Semtech)
Semtech公司正在瑞士的納沙泰爾城市環境中進行LoRaWAN定位測試。這座城市坐落在一個湖和一座山之間,并且有許多小山。所以從GDOP的角度來看,這是一個困難的案例。因為由于多山,會帶來長的時延。圖5-6中標示了6個基站和30個固定的室外測試點。
(圖5.6 納沙泰爾定位例子示意圖)
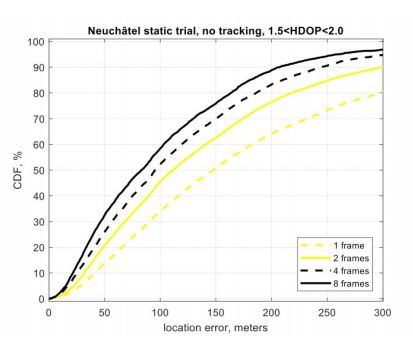
圖5-7展示了從30個測試點收到的不同數量的LoRaWAN幀的定位性能的累積分布函數。在單幀中平均定位精度約為150米, 8幀的精度提高到80米。這里沒有用到濾波。
在不同的數據速率下進行了多組測試:SF7, SF10 和 SF12。它們的性能是完全相同的,說明多路徑和GDOP才是影響性能的主要因素。GDOP越差,定位性能相應變差:8幀時,90%的定位精度僅為205米。
(圖5.7 納沙泰爾定位性能圖)
4
姆科馬齊國家公園(Semtech/Kerlink)
互聯網生命和ShadowView基金會基于LoRaWAN正在開發追蹤器以保護坦桑尼亞姆科馬齊國家公園保護區內瀕危的黑犀牛,借助Semtech和Kerlink公司的技術支持。無GPS的LoRaWAN追蹤器體積更小、價格更低、耗電更少,并且不受配備GPS干擾器的盜獵者影響,同時與GPS追蹤器相比,它們能更頻繁地進行地理定位報告。
去年9月,第一個LoRaWAN追蹤器被植入了一頭犀牛的犀牛角,并讓該公園的安全人員自己操作來定位、監控犀牛。
犀牛保護區是一個占地50平方公里的圍欄區域。已經部署了四個支持定位的Kerlink網關來實現該區域的LoRaWAN覆蓋。大門之間的距離在4公里到10公里之間。定位精度超過50m,在某些情況下超過20m。
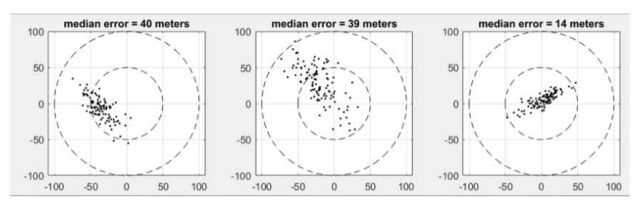
(圖5.8 姆科馬齊定位試點示意圖(四幀))
圖5-8展示了犀牛定位的例子,每個點使用四個幀來計算一個位置。前兩個圖中的平均誤差為40m,而相應的測試點位于一個HDOP高于2的區域。第三圖中HDOP為1.5。在這里測試點和網關的確切位置不能公開。區域內網絡將進行更好的HDOP優化,自然公園其他區域的網絡部署也已經完成了計劃。
公園管理部門正在使用的其他智能應用還包括安裝在車輛上的太陽能追蹤器,用于追蹤高危區域內人員和游客的行蹤。圖5-9顯示了單幀定位結果,精度高于50米,但是比四幀的情況變化更多。
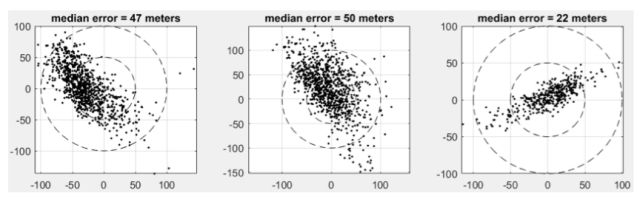
(圖5.9 姆科馬齊定位試點示意圖(單幀))
5
布依格建筑(Objenious/Sagemcom)
建筑物流、車隊管理和廢品管理等都是物聯網潛在的市場。Objenious (布依格電信)和Sagemcom共同開發了布伊格建筑的Ubysol解決方案,當卡車在裝卸貨點之間運輸貨物時,提供建筑廢物的追蹤。
Ubysol解決方案支持“大巴黎”區域總體規劃,目的是將巴黎市區(巴黎市區和周邊的130個郊區、社區)改造成21世紀的城市。據估計,該項目將產生超過4300萬噸的建筑垃圾。每輛卡車配備一個Siconia?多傳感器終端設備。終端設備的數據傳輸由運動傳感器觸發,并使用陀螺儀來檢測裝卸貨。
為了給LoRaWAN定位做基準測試,一些卡車同時也安裝了GPS傳感器。GPS和LoRaWAN定位的路徑進行了比較,如圖5-10,兩個路徑吻合度較好。
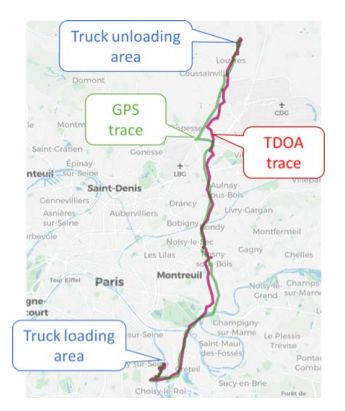
(圖5.10 GPS、LoRaWAN TDOA定位路徑對比)
統計性能(CDF)經過數月的收集得到,Ubysol解決方案的定位性能結果如圖5-11所示。實現了136m的平均定位精度。
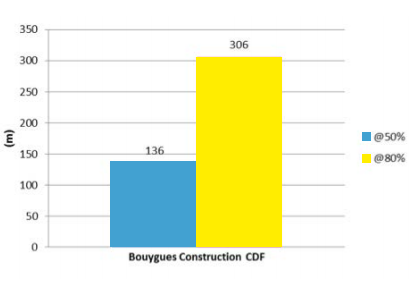
(圖5.11 Ubysol的解決方案精度統計)
6
巴黎(Objenious/Sagemcom)
城市環境的資產管理面臨著幾個挑戰:多路徑環境、典型的非視距傳播。Objenious和Sagemcom在巴黎市中心部署了許多Siconia?定位設備來追蹤卡車。當卡車離開指定區域將觸發報警。圖5-12展示了巴黎市中心的定位終端和網關位置及LoRaWAN定位效果。
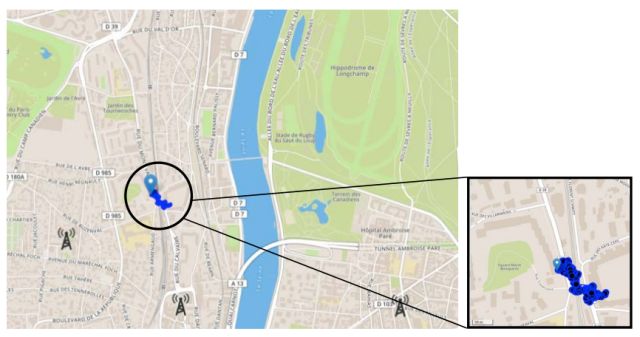
(圖5.12 巴黎市中心的卡車定位示意圖)
這些定位終端的定位關鍵性能指標(KPI)如圖5-13所示。CDF(第一個圖)和定位精度的概率分布函數(第二個圖)(平均值:57m, std: 18m),以及定位誤差(第三個圖)。瞬時站點距離(ISD;第四個圖)是網絡密度的指示。
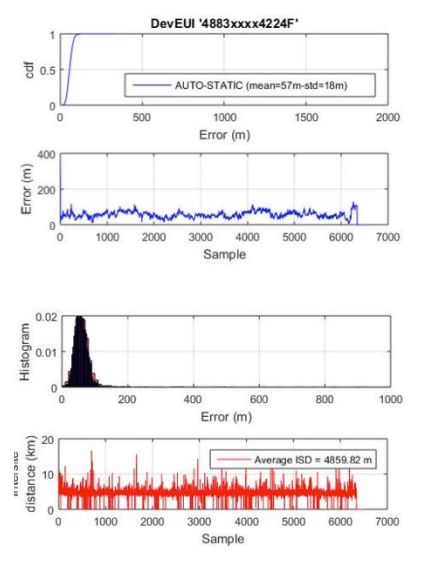
(圖5.13 定位性能(CDF, ISD),巴黎市區)
圖5-14顯示了網絡部署在定位精度上的瞬時HDOP影響。在網關部署之前,應該按照第4.3節的說明來評估靜態GDOP,并考慮部署區域可用的網關組合。
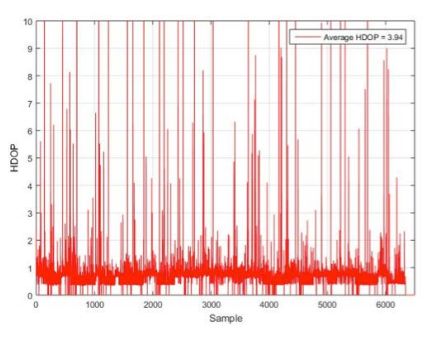
(圖5.14 瞬時HDOP影響,巴黎市中心)
圖5-15顯示了在部署區域中從固定的終端設備(紅色)中獲得的GDOP。
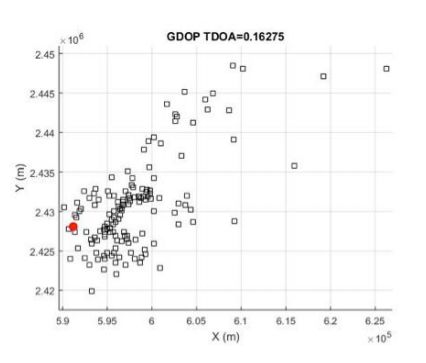
(圖5.15 在網關部署情況下一個固定終端(紅色)
的GDOP估計)
對于同一個的靜止終端設備,圖5-16展示了終端設備的無線電測量環境(平均RSS)和終端設備和基站之間的距離的關系。顯然,在由密集的網關形成的走廊之外區域,HDOP的值要遠遠高于與網關走廊對齊的位置。
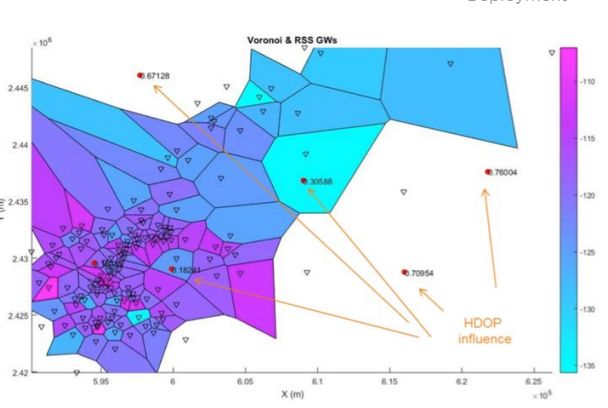
(圖5.16 HDOP影響 vs. 終端與基站距離)
7
托里涅富伊拉爾(Kerlink/Semtech)
Kerlink公司在其Wirnet IBTS系列支持基于位置的服務(LBS)中提供定位基站。這些基站可提供精準的時間戳來進行定位(使用Semtech的協議)。一個TDOA定位的求解器已經開發并集成到專有的LBS解決方案中。
Kerlink公司在世界范圍內的各種環境和條件(農村、半城市、城市)建立了若干測試平臺,以評估和優化定位求解器的性能,特別是計算精度和定位精度。部署在托里涅富伊拉爾的測試平臺將會一直工作下去,四個基站安裝在城市中、多個定位終端放置在計劃好的固定位置。當定位求解器收到一個近實時的消息時它開始計算該位置信息,然后將結果返回到指示板進行顯示。
圖5.17 (a)托里涅富伊拉爾LoRaWAN定位測試平臺
(b)靜止終端的估測位置
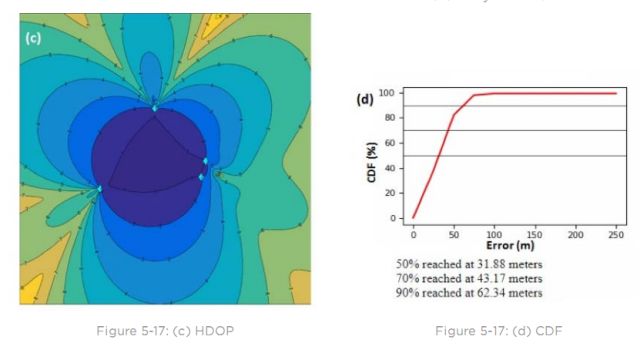
圖5.17 (c)HDOP (d)CDF
圖5-17(a)和(b)顯示了已部署的網絡和定位終端的估測位置。對HDOP的分析(圖5-17(c))使我們能夠更清晰的理解定位的精確性。這里要指出的是,定位信息利用卡爾曼濾波器進行了處理。對于一個終端的CDF,如圖5-17(d)顯示,32米的準確率為50%,43米為70% 和62米是90%。
LoRaWAN定位總結
總結得出如下結論:
? LoRaWAN TDOA 定位能夠提供20到200米的定位精度。
? LoRaWAN 定位的一個好處是利用長期使用、電池供電的A類終端設備實現,因此實現了零額外的BOM成本的增加。
? 減少多路徑誤差和良好的網關部署規劃能將定位精度提升到20米。
? LoRaWAN TDOA定位特別適用于如下場景:
?區域圍欄。固定資產是否被移動?(建筑工地、公用場地、機場、校園等場所的防盜)
?追蹤移動緩慢的資產,不要求頻繁的位置更新(人、寵物、牲畜、車輛等),特別適用于智能農業和智慧城市某些案例。
LoRaWAN TDOA定位可能并不適合如下場景:
? 實時、移動的資產跟蹤。越高的定位頻率正意味著越多的電量消耗,C類終端,等。
?高動態資產定位。
? 高精度定位(亞米級,至少使用現在的基站時鐘無法達到)
? LoRaWAN協議用在需要GPS功能傳輸的用例。
-
gps
+關注
關注
22文章
2886瀏覽量
166055 -
lorawan
+關注
關注
3文章
313瀏覽量
23800
原文標題:【干貨】《LoRaWAN 定位白皮書》重磅發布!
文章出處:【微信號:GeWu-IOT,微信公眾號:物聯網資本論】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論