 揭秘谷歌AutoML背后的漸進式搜索技術
揭秘谷歌AutoML背后的漸進式搜索技術
谷歌的AutoML一經提出,就引起了學界及業界的廣泛關注,然而其簡易操作的背后,則是強大算力支持下的大量科研工作,其中之一便是漸進式網絡結構搜索技術。本文中,劉晨曦博士將為大家揭開AutoML的面紗,看他如何通過迭代自學習的方式,積跬步以至千里,尋找到最優網絡結構,從而將萬繁歸于至簡。
文末,大講堂特別提供文中提到所有文章和代碼的下載鏈接。
本文中,將介紹的漸進式神經網絡搜索算法,是和谷歌大腦、谷歌云、谷歌研究院的很多研究員一同完成的。
其中,PNASNet-5在ImageNet上的代碼和模型已經發布在TensorFlow Slim:
首先介紹AutoML,它是谷歌內部一個宏大的目標,是創造一種機器學習算法,使得它能夠最好地服務于用戶提供的數據,而在這過程中有盡可能少的人類參與。
從起初的AlexNet到Inception,ResNet,Inception-ResNet,機器在圖像分類問題上已經取得了很好的成績,那么我們為什么還想使用AutoML算法來研究圖像分類呢?
首先,如果可以通過自動搜索,找到比人類設計的最好算法還好的算法,豈不是很酷?其次,從更加實用的角度出發,圖像分類問題是大家學習得很多的問題,如果在該問題上取得突破,那么突破其他問題的可能性也大大增加。
接下來介紹Neural Architecture Search(NAS)問題,它是AutoML一個具體的分支。
Neural Architecture Search基本遵循這樣一個循環:首先,基于一些策略規則創造簡單的網絡,然后對它訓練并在一些驗證集上進行測試,最后根據網絡性能的反饋來優化這些策略規則,基于這些優化后的策略來對網絡不斷進行迭代更新。
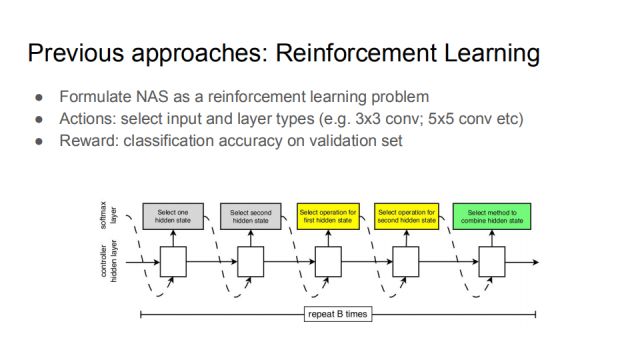
之前的NAS工作可以大致分為兩方面,首先是強化學習,在神經結構搜索中需要選擇很多的元素,如輸入層和層參數(比如選擇核為3還是5的卷積操作)的設置,設計整個神經網絡的過程可以看作一系列的動作,動作的獎賞就是在驗證集上的分類準確率。通過不斷對動作更新,使智能體學習到越來越好的網絡結構,這樣強化學習和NAS就聯系起來了。
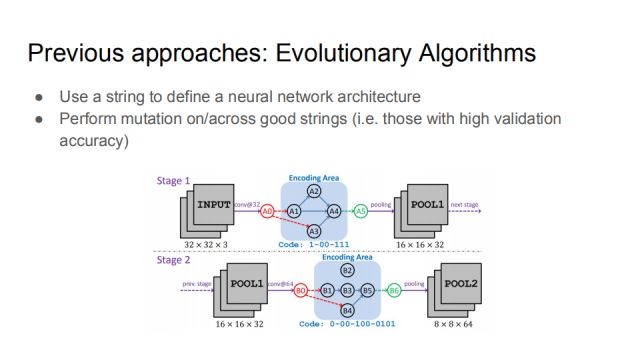
另一方面NAS是一些進化算法,這一大類方法的主要思路是,用一串數定義一個神經網絡結構。如圖是ICCV2017謝凌曦博士的工作,他用一串二進制碼定義一種規則來表達特定的神經網絡連接方式,最開始的碼是隨機的,從這些點出發可以做一些突變,甚至在兩個數串(擁有較高驗證準確率)之間做突變,經過一段時間就可以提供更好的神經網絡結構。
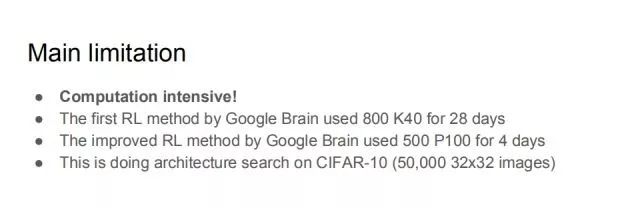
而目前方法最大的問題在于,它對算力的要求特別高。以強化學習為例,谷歌大腦最開始提出的強化學習方法,用了800塊K40GPU,訓練了28天;后來2017年7月提出的改進版,用了500塊P100GPU訓練了4天,而且這是在非常小的CIFAR-10數據集上做的,該數據集只有5萬張30*30的圖。即便這樣小的數據集就需要如此大的算力支撐,也就是說想要繼續擴展NAS,用強化學習的方法是不現實的。
為加速NAS過程,我們提出了一個新的方法,謂之“漸進式的神經結構搜索”。它既不是基于強化學習的,也不屬于進化算法。在介紹具體算法前,首先來理解這里的搜索空間。
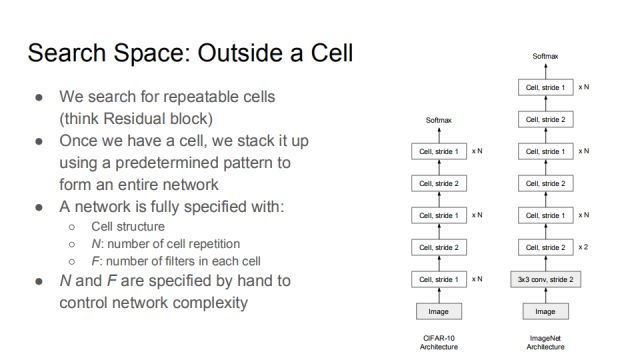
首先搜索可重復的cells(可以看作是Residual block),一旦找到一個cell,就可以自由地選擇其疊加方式,形成一個完整的網絡。這樣的策略在Residual Network中已經出現多次。當確定了cell structure后如上右圖將其疊加成一個完整的網絡,以CIFAR-10網絡舉例,在兩個stride2的cell之間,stride1的cell疊加次數都為N,而Residual網絡中不同的groups疊加的次數不同。
一個網絡通常由這三個要素來確定:cell的結構,cell重復的次數N,每一個cell中的卷積核個數F,為了控制網絡的復雜度,N和F通常經手工設計。可以理解為,N控制網絡的深度,F控制網絡的寬度。
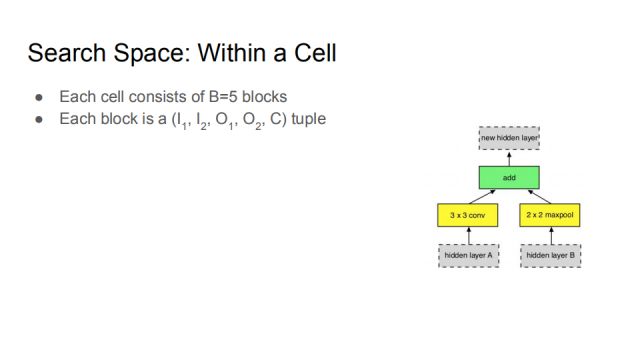
接下來主要討論如何確定cell,在我們的搜索空間中,一個cell由5個block組成,每個block是一個(I_1,I_2,O_1,O_2,C)的元組。以下將具體介紹。
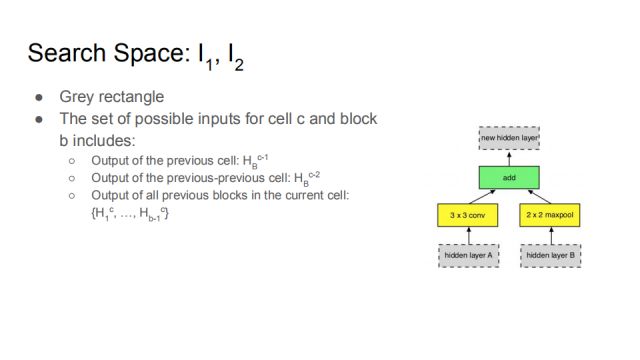
如圖,網絡輸入的搜索空間如圖中灰色矩形所示,I_1,I_2對應圖中hidden layer A和hidden layer B,I即指輸入(Input)。這兩個灰塊可以選擇不同的隱含空間,cell c block b可能的輸入定義為:
前一個cell的輸出:H_B^(c-1)
前一個的前一個的cell的輸出:H_B^(c-2)
在當前cell的當前block的所有之前輸出:{H_1^c,…,H_(b-1)^c }
比如右邊的block是這個cell里的第一個block,在選用第二個block的時候它就可以選取第一個block產生的new hidden layer,也就是說,第二個block的輸入涵蓋了第一個block的輸出。這樣的設計為了允許一定的泛化性,可以刻畫Residual Network,DenseNet之類的網絡。
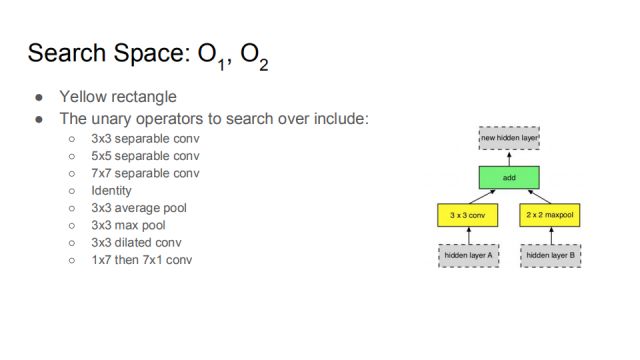
O_1,O_2對應圖中的黃色方框,這其實是對剛才選取的隱含層的一元運算符,它包含了3*3的卷積,5*5的卷積,7*7的卷積,identity,3*3的均值池化,3*3的最大值池化,3*3的加寬池化以及1*7后接7*1的卷積。讓數據在搜索空間中學習找到最適合的操作。
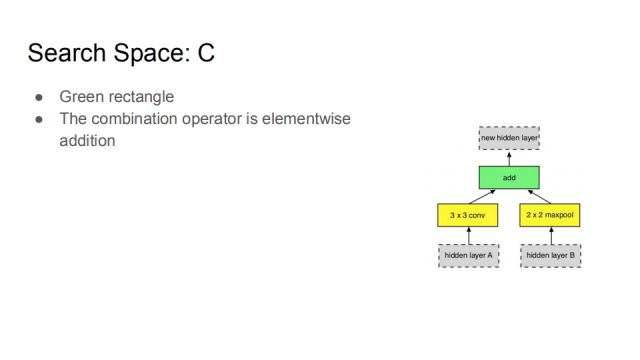
綠色框代表C這個運算,它把由I_1,I_2產生的O_1,O_2通過一定的方式組合到一起,產生一個新的隱含空間。這個C操作是按位加和的操作。
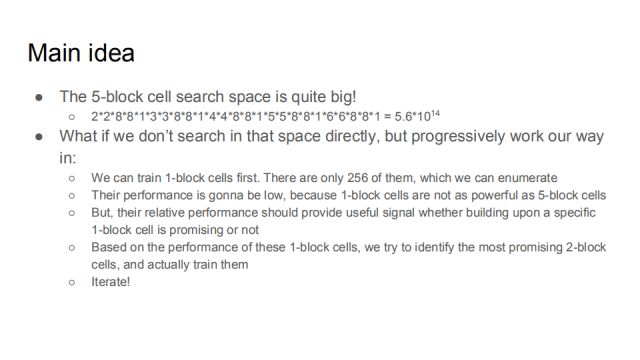
在這個搜索空間下,盡可能有效地學習到一個性能較好的cell,這樣就能疊加起來成為一個完整的網絡。而剛才包含5個block的cell的搜索空間是非常大的,如上圖等式所示。而之前介紹的無論是強化學習還是基于進化算法,都是直接搜索,這在搜索開始是非常迷茫的,那么如果不直接在那個空間進行搜索,而是漸進式地進行如下操作會怎樣呢:
首先訓練所有的1-block cells,只有256個這樣的cell。雖然可以通過枚舉的方式,但性能會很低,因為只有1個block的cell不如包含5個block的cell有效。但是,這部分性能信息可以為是否繼續采用這個cell的信號提供輔助,基于1-block cell的表現,我們可以嘗試發現最有希望的2-block cell,并對其進行訓練,如此迭代,即可構建整個網絡。
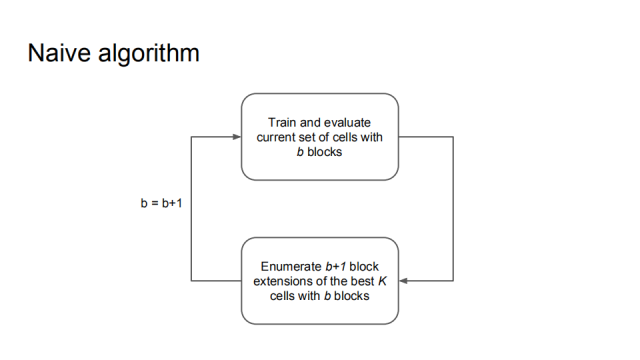
可以概括為一個簡單的算法,訓練和評估當前有b個blocks的cells,然后根據其中最好的K個cells來枚舉b+1個blocks,然后去訓練和評估。
而實際上,這個算法是不能真正奏效的,因為,對于一個合理的K(如〖10〗^2),需要訓練的子網絡就高達〖10〗^5個,此運算量已經超過了以往的方法。因此,我們提出了一個準確率預測器,它可以不用訓練和測試,而是只通過觀察數串,就能評估一個模型是否是有潛力的。
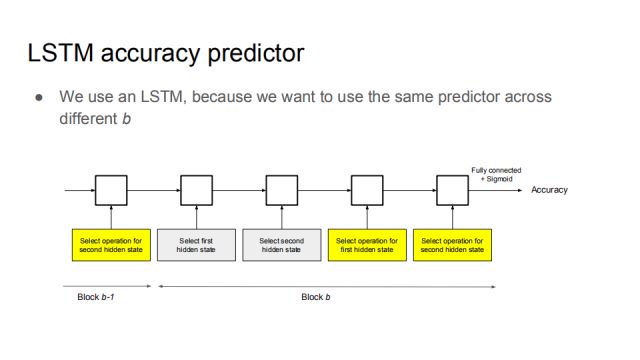
我們使用了一個LSTM網絡來做準確率預測器,之所以使用它,是因為在不同的block中可以使用同一個預測器。
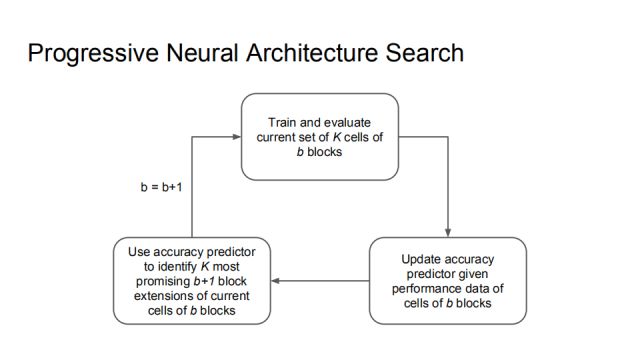
這里給出完整的Progressive Neural Architecture Search的算法。首先訓練并評估當前b個blocks的K個cells,然后通過這些數據的表現來更新準確率預測器,可以使準確率預測器更精確,借助預測器識別K個最有可能的b+1個block。這樣學出來的結果可能不是最正確的,但卻是一個合理的trade-off結果。
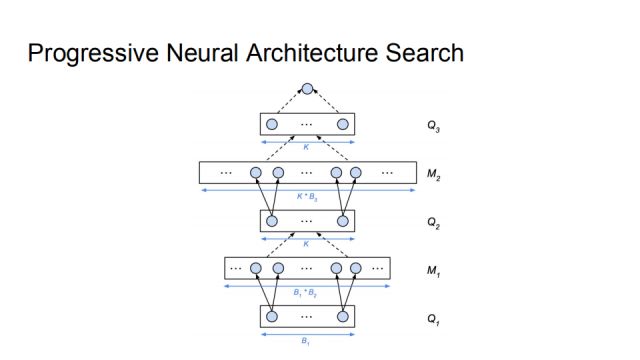
舉個例子 ,最開始b=1,Q1時有256個網絡,對它全部訓練測試,然后用這K個數據點訓練準確率預測器。枚舉Q1的所有后代M1,并把這個準確率預測器運用在M1的每個元素上,選出其中最好的K個,即得到了b=2時的集合Q2。然后將b=2的網絡進行訓練測試,經過上述相同的過程,可以得到Q3。Q3中最好的模型即為PNAS返回的結果。
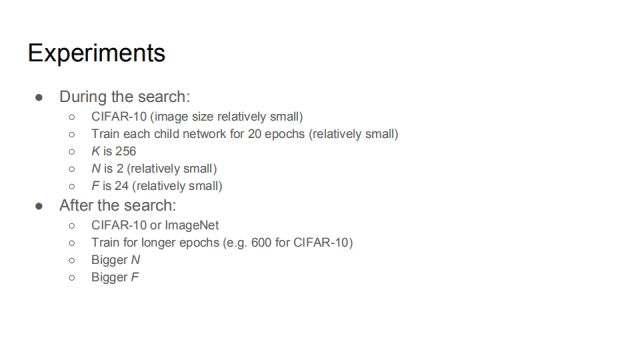
實驗分為兩個過程,一個是在搜索過程中,另一個是在搜索之后。在搜索過程中,我們使用CIFAR-10這個相對較小的數據集,每一個子網絡訓練的epoch都設置為20,K取為256,N為2,F為24,這些參數都是相對較小的。在搜索之后,我們在CIFAR-10和ImageNet上進行測試,使用了更長的epochs,更大的N,F。我們這個工作的目的是加速NAS的過程,下面是實驗對比。
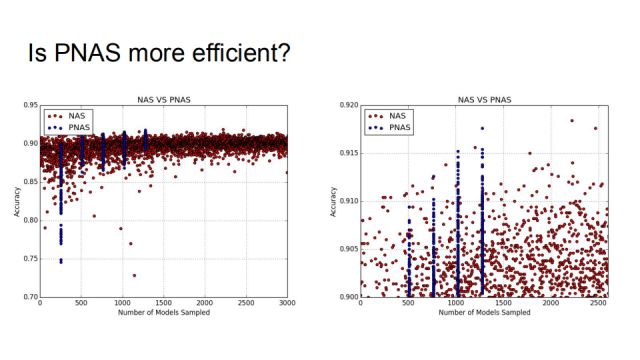
接下來對比PNAS和之前的NAS方法,藍色的點是PNAS,紅色的是NAS,五個藍色的chunk對應b=1,2,3,4。每個chunk里有256個點,隨著b的增加,進到越來越復雜的搜索空間。可以看出相比于紅色的點,藍色的點上漲更加快也更加緊致。右邊是一個放大的圖。
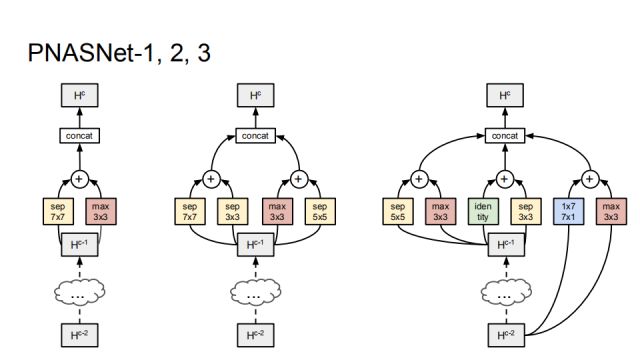
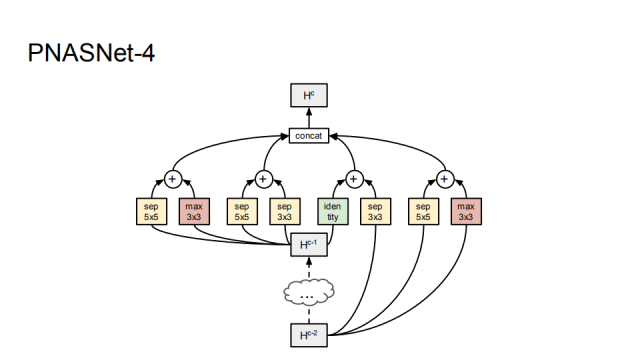
如圖是最后學習到的網絡結構,可以看出,最開始學習到的是separable和max convolution的組合,后面漸漸學習到更多的組合。
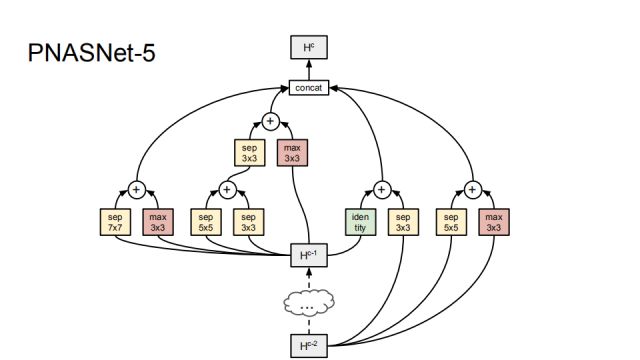
PNASNet-5是我們在搜索的過程中找到的最好的網絡結構,它由5個block組成。
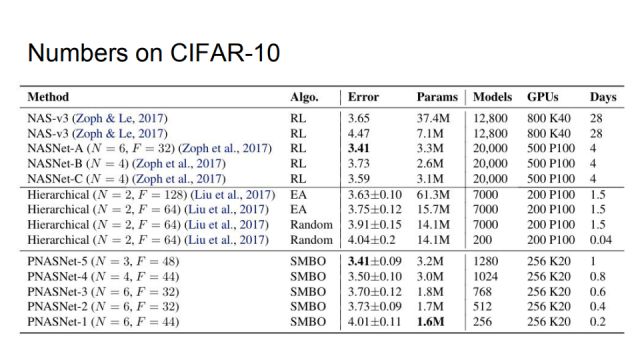
這是我們在CIFAR-10上的對比結果,RL表示算法基于強化學習,EA表示基于遺傳算法,我們的算法SMBO即sequential model based optimization,Error指最好模型的top-1誤分率。第一組基于強化學習的方法中最好的是NASNet-A,它的錯誤率是3.41%,所用參數個數為3.3M;第二組是基于遺傳算法的方法,它是DeepMind在2018年ICLR發表的工作,它最好的錯誤率是3.63%,所用參數個數為61.3M,而第三組是我們的方法,在錯誤率為3.41的條件下,我們所用參數僅為3.2M,并且提速很多。
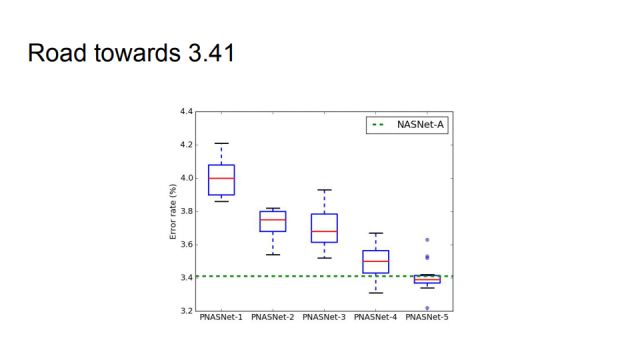
這張圖更直觀地展示了如何達到了與NASNet-A可比的性能。
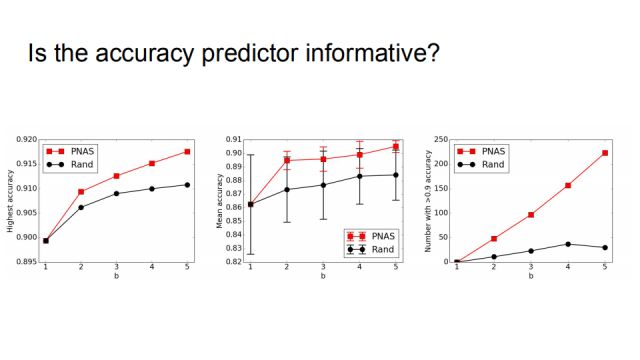
為了驗證準確率預測器是否是信息豐富的,我們做了一個隨機的對比實驗,如果不用progressive neural architecture search,在每一個number of b的時候用隨機來代替。結果表明隨機的策略性能要差很多,尤其是最右,如果在每一個b的取值,都訓練256個模型的話,以準確率大于0.9為統計指標,隨機法只有三十多個,而PNAS有二百多個符合。
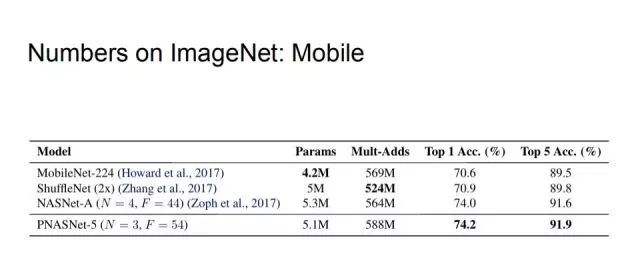
最后是在ImageNet數據集上的對比,首先介紹在輕量神經網絡的應用比對。我們控制Mult-Adds不超過600M,在這一條件下,PNASNet-5相比MobileNet-224,ShuffleNet(2x),和NASNet-A有最高的top1和top5的準確率。
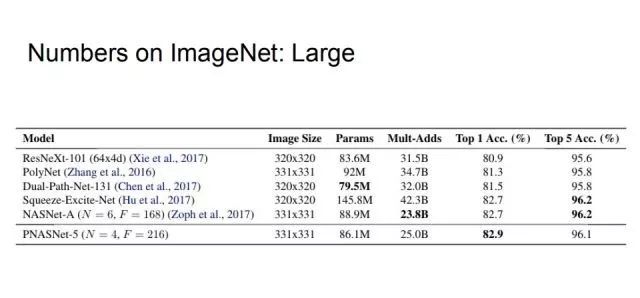
此外,對不加限制的模型進行比對,在實驗過程中盡量和NASNet-A的參數量保持一致,最后的top1準確率達到了82.9%。
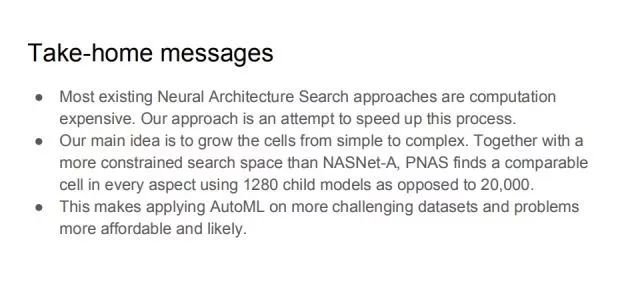
總結一下,本次報告中介紹的工作中最關鍵的幾個點:大多數現存的神經網絡搜索方法都有很高的算力需求,由此產生高昂的時間代價,而我們試圖加速這個過程。思路的核心在于,將cells從簡單到復雜推進,加之比NASNet-A更緊致的搜索空間,PNAS找到了一個可比的cell,只用了1280個而不是20000個子模型。這使得AutoML將可以用到更多有挑戰的數據集上。
-
谷歌
+關注
關注
27文章
6142瀏覽量
105113 -
神經網絡
+關注
關注
42文章
4765瀏覽量
100559
原文標題:跬步至千里:揭秘谷歌AutoML背后的漸進式搜索技術
文章出處:【微信號:deeplearningclass,微信公眾號:深度學習大講堂】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
漸進式神經網絡結構搜索技術
原文分享-谷歌
5G的背后技術揭秘
基于SIMD的漸進式網絡編碼的高效實現
拆解報告:三星SGH-J750,漸進式開發策略的范例
什么是神經架構搜索?機器學習自動化真能普及大眾嗎?

詳細講解谷歌的AutoML
人工智能革命的領軍人物 谷歌AutoML幕后的傳奇英雄

AutoML新書:AutoML系統背后的基礎知識
AutoML又一利器來了,谷歌宣布開源AdaNet(附教程)
未來可期之PWA漸進式Web應用





 工商網監
工商網監
評論