 有淺入深的介紹BLE與MEMS中的開發板設計
有淺入深的介紹BLE與MEMS中的開發板設計
當BLE遇到MEMS,就如同天使有了翅膀。本期從有淺入深的介紹BLE與MEMS的那些事,就從ST的STEVAL-IDB007V1開發板中BLE_SensorDemo例程開始。
藍牙入門網上資料很多,可參考《藍牙BLE權威教程》,或者看看干貨 | BLE開發,你要知道這幾件事
開發環境搭建請參考論壇帖子STEVAL-IDB007V1之透傳演示操作流程和所需軟件資源下載(http://bbs.eeworld.com.cn/thread-604229-1-1.html),從開始菜單進入BlueNRG-1 Navigator可以實際運行各種例程查看效果。
硬件連接:使用ST-Link V2中SWCLK與SWDIO與開發板對應的引腳連接,用來仿真;供電和串口都通過USB線纜。
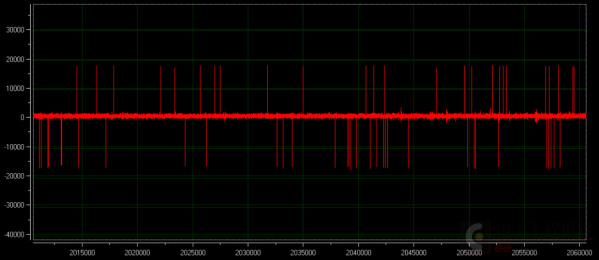
下圖是局部放大圖:
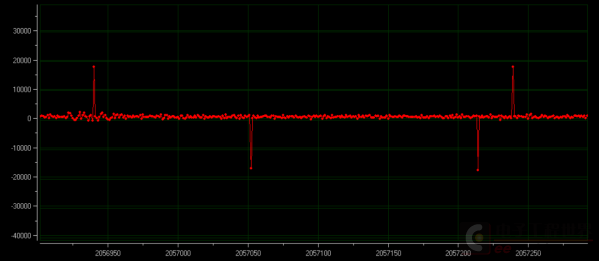
會發現陀螺儀的值會跳變(不同的傾角下跳變的概率不一樣,更新頻率越高,跳變的概率越大),由于陀螺儀在原始的寄存器值上乘以了70,將跳變值除以70后為+255和-255。
經過一系列的摸索,和ST工程師的幫助,終于解決了問題,見下圖,那就是將BDU(Block Data Update)位置1,沒有置1的話,數據沒有準備好就被讀出來也是有可能的,這也就是為何更新頻率設置的越高就會越容易出現錯誤值的原因。
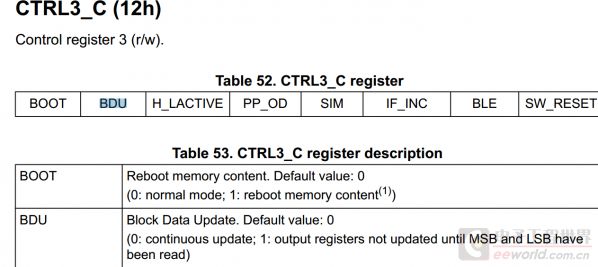
其實早在2015年在數據手冊中就建議將BDU位置1了,后來的官方初始化程序中也都將BDU置1了。

下面是不動芯片,僅僅將BDU置1后的效果:
因此想要準確的的獲取的數據記得將BDU位置1哦。
更高效的讀取數據該傳感器使用的是SPI接口,這點很好,相比于IIC,SPI這是要快太多了,我們可以節約更多的時間用來做其他的事,也有利于節能,該芯片最高支持10MHz的SPI速度,但是驅動卻寫的不是很高效,官方代碼如下:
-
static IMU_6AXES_StatusTypeDef LSM6DS3_G_GetAxes( int32_t *pData )
-
{
-
/*Here we have to add the check if the parameters are valid*/
-
int16_t pDataRaw[3];
-
float sensitivity = 0.0f;
-
if(LSM6DS3_G_GetAxesRaw(pDataRaw) != IMU_6AXES_OK)
-
{
-
return IMU_6AXES_ERROR;
-
}
-
if(LSM6DS3_G_GetSensitivity( &sensitivity ) != IMU_6AXES_OK)
-
{
-
return IMU_6AXES_ERROR;
-
}
-
pData[0] = (int32_t)(pDataRaw[0] * sensitivity);
-
pData[1] = (int32_t)(pDataRaw[1] * sensitivity);
-
pData[2] = (int32_t)(pDataRaw[2] * sensitivity);
-
return IMU_6AXES_OK;
-
static IMU_6AXES_StatusTypeDef LSM6DS3_G_GetAxesRaw( int16_t *pData )
-
{
-
/*Here we have to add the check if the parameters are valid*/
-
uint8_t tempReg[2] = {0, 0};
-
if(LSM6DS3_IO_Read(&tempReg[0], LSM6DS3_XG_MEMS_ADDRESS, LSM6DS3_XG_OUT_X_L_G, 2) != IMU_6AXES_OK)
-
{
-
return IMU_6AXES_ERROR;
-
}
-
pData[0] = ((((int16_t)tempReg[1]) << 8) + (int16_t)tempReg[0]);
-
if(LSM6DS3_IO_Read(&tempReg[0], LSM6DS3_XG_MEMS_ADDRESS, LSM6DS3_XG_OUT_Y_L_G, 2) != IMU_6AXES_OK)
-
{
-
return IMU_6AXES_ERROR;
-
}
-
pData[1] = ((((int16_t)tempReg[1]) << 8) + (int16_t)tempReg[0]);
-
if(LSM6DS3_IO_Read(&tempReg[0], LSM6DS3_XG_MEMS_ADDRESS, LSM6DS3_XG_OUT_Z_L_G, 2) != IMU_6AXES_OK)
-
{
-
return IMU_6AXES_ERROR;
-
}
-
pData[2] = ((((int16_t)tempReg[1]) << 8) + (int16_t)tempReg[0]);
-
return IMU_6AXES_OK;
-
}
每次都是單次讀取(讀兩個字節)每一軸的數據,而且還獲取了一次sensitivity(讀一個字節)。
我們知道SPI要完成一次讀數據的操作,本質是需要讀寫兩次的,第一次將地址寫進去,然后再將0寫入,將數據弄出來。因此驅動如果需要讀取6軸的數據一共需要寫12次,讀18次SPI。而我認為sensitivity是開始設置的,可以不讀,然后6軸的數據可以一次全部讀出來,因為默認SPI地址是會累加的,
因此程序可以改成如下,然后將陀螺儀值乘以70,加速度計值乘以0.122
-
void Get_Sensor_RawData(void){
-
Sensor_IO_Read(NULL,LSM6DSL_ACC_GYRO_OUTX_L_G,regValue, 12);
-
for(int i=0;i<6;i++){
-
Sensor_Raw_Data[/size][/font][font=微軟雅黑][size=3] = ( ( ( ( int16_t )m_rx_buf[2*i+2] ) << 8 ) + (int16_t )m_rx_buf[2*i+1] );
-
}
-
}
從0x22地址開讀,也就是寫1次,讀12次,而且還節約了SPI的開啟和關閉的耗時,這樣就大大的提高的數據獲取的速度,如果可以使用DMA能夠更高效。
因此如果想要更加高效的使用陀螺儀加速度計,記得要連續的讀取12個字節且無需讀取靈敏度哦。
-
mems
+關注
關注
129文章
3897瀏覽量
190341 -
陀螺儀
+關注
關注
44文章
779瀏覽量
98573 -
ST
+關注
關注
32文章
1129瀏覽量
128828
原文標題:干貨 | 當BLE遇到MEMS——收服和調教
文章出處:【微信號:wwzhifudianhua,微信公眾號:MEMS技術】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
正點原子fpga開發板不同型號
【干貨】有了這份HK32F407ZGT7開發板介紹,1萬個項目輕松拿捏!

【BearPi-Pico H3863星閃開發板體驗連載】藍牙 BLE 透傳測試
瑞薩開發板?RX-FSOE-REF-KIT功能安全使用介紹(上)

多個esp32開發板如何組成ble mesh網絡,是否可以自動組網呢?
使用esp-idf-v5.0.1 example中的esp_ble_mesh例程遇到的疑問求解
鴻蒙OpenHarmony南向:【Hi3861開發板介紹】






 工商網監
工商網監
評論