") 無(wú)人機(jī)如何應(yīng)對(duì)突發(fā)威脅帶來(lái)的影響
無(wú)人機(jī)如何應(yīng)對(duì)突發(fā)威脅帶來(lái)的影響
隨著航空技術(shù)的發(fā)展,無(wú)人機(jī)在軍用與民用領(lǐng)域的應(yīng)用不斷擴(kuò)大,如:敵情偵察、地形勘探、地理測(cè)繪、目標(biāo)轟炸、高壓巡線等。無(wú)人機(jī)執(zhí)行的任務(wù)復(fù)雜多樣,為了提高其生存能力,必須實(shí)現(xiàn)自主飛行。航跡規(guī)劃作為無(wú)人機(jī)自主飛行的關(guān)鍵技術(shù)之一,一直是國(guó)內(nèi)外學(xué)者們研究的熱點(diǎn)。
航跡規(guī)劃可以被看作是優(yōu)化一系列未知航點(diǎn)集的多約束組合問(wèn)題,據(jù)現(xiàn)有的報(bào)道,很多人工智能算法可有效解決該問(wèn)題。例如,XU C等[3]提出采用人工蜂群算法(Artificial bee colony algorithm,簡(jiǎn)稱ABC)去解決無(wú)人機(jī)航跡規(guī)劃問(wèn)題,并在偵察蜂搜索階段加入混沌算子,取得了不錯(cuò)的效果;SZCZERBA R J等[4]在A*算法中添加自適應(yīng)搜索策略,有效去除了規(guī)劃空間中的無(wú)用航點(diǎn),提高了算法的搜索時(shí)間。然而,上述方法只停留在二維航跡規(guī)劃層面上,并未考慮規(guī)劃空間中的地形信息和無(wú)人機(jī)的拐彎角、俯沖角/爬升角以及最短航跡段長(zhǎng)度等約束。而三維航跡規(guī)劃更符合實(shí)際需求,需對(duì)其開(kāi)展研究。近年來(lái),張仁鵬等[5]在建立地形數(shù)字模型的基礎(chǔ)上,采用改進(jìn)粒子群算法來(lái)模擬無(wú)人機(jī)三維航跡規(guī)劃,獲得了安全可飛的航跡;ROBERGE V等[6]結(jié)合遺傳算法(Genetic Algorithm,GA)與粒子群算法兩者的優(yōu)勢(shì),采用混合算法解決了無(wú)人機(jī)三維航跡規(guī)劃問(wèn)題。然而,上述算法隨著搜索空間維數(shù)的增加,穩(wěn)定性和收斂性會(huì)隨之下降,也會(huì)陷入局部最優(yōu)值。另外,這些研究也未涉及無(wú)人機(jī)如何應(yīng)對(duì)突發(fā)威脅帶來(lái)的影響。
本文采用ABC算法來(lái)解決無(wú)人機(jī)的三維航跡規(guī)劃和針對(duì)突發(fā)威脅時(shí)的航跡重規(guī)劃問(wèn)題。同時(shí),為了提供傳統(tǒng)ABC算法的收斂性、魯棒性與穩(wěn)定性,在雇傭蜂搜索時(shí)引入自適應(yīng)搜索算子、在跟隨蜂搜索時(shí)引入新型概率選擇方式及在偵察蜂搜索時(shí)引入混沌算子,從而得到了一種改進(jìn)的ABC算法(Probability self-Adaptive Chaotic Artificial Bee Colony algorithm,PAC-ABC)。然后,對(duì)無(wú)人機(jī)的規(guī)劃空間、地形信息和航跡代價(jià)模型進(jìn)行了建模,給出了相應(yīng)的數(shù)學(xué)描述。最后,通過(guò)三維航跡規(guī)劃與突發(fā)威脅航跡規(guī)劃模擬,驗(yàn)證了本文所提算法的有效性。
1航跡規(guī)劃建模
1.1 規(guī)劃空間與地形模型
在三維空間內(nèi),無(wú)人機(jī)航跡規(guī)劃問(wèn)題就是利用規(guī)劃算法找出一系列適合飛行且能滿足約束條件的飛行航點(diǎn)集。在無(wú)人機(jī)實(shí)際應(yīng)用匯總,規(guī)劃空間中隱藏著各種威脅信息,如地形、雷達(dá)、高炮等,有時(shí)這些威脅還具有不確定性,因此想預(yù)先獲取飛行空間中的威脅信息具有很大的難度。另外,無(wú)人機(jī)的續(xù)航時(shí)間很依賴油耗大小。為了簡(jiǎn)化航跡規(guī)劃過(guò)程,本文提出了以下幾個(gè)假設(shè)條件:(1)所有規(guī)劃空間內(nèi)的威脅物與地形信息均一致;(2)無(wú)人機(jī)的油耗與航程成線性關(guān)系;(3)無(wú)人機(jī)的飛行速度保持恒值不變;(4)忽略陣風(fēng)干擾、機(jī)械動(dòng)力學(xué)及機(jī)械振動(dòng)等因素。
用點(diǎn)(xα,yα,zα)來(lái)表征規(guī)劃空間的某個(gè)航點(diǎn),其中xα為經(jīng)度值,yα為緯度值,zα為海拔高度,故航跡規(guī)劃的規(guī)劃空間可描述為[8]:
其中,(x,y)表示山體坐標(biāo),(ak,bk)為山體中心對(duì)稱軸坐標(biāo),hk為山體的最高點(diǎn)。
1.2 航跡代價(jià)模型
航跡代價(jià)模型由威脅代價(jià)模型和油耗代價(jià)模型組成。其中,威脅代價(jià)主要考慮高炮威脅和雷達(dá)威脅[9]。
(1)雷達(dá)威脅。通常雷達(dá)的探測(cè)范圍為圓形,故設(shè)雷達(dá)對(duì)無(wú)人機(jī)的威脅概率為:

其中,d為雷達(dá)中心到無(wú)人機(jī)的距離,dmax為雷達(dá)探測(cè)區(qū)域的最大半徑。
(2)高炮威脅。和雷達(dá)威脅類似,高炮威脅的范圍也為圓形,故設(shè)高炮對(duì)無(wú)人機(jī)的威脅概率為:

(3)油耗代價(jià)。油耗與航程有關(guān),故認(rèn)為油耗代價(jià)就是總航程。
另外,還應(yīng)該考慮無(wú)人機(jī)航跡規(guī)劃過(guò)程中的其他約束條件:
(1)極限拐彎角。無(wú)人機(jī)通過(guò)控制其偏航角來(lái)控制航向的改變。因?yàn)榇嬖趹T性,飛行過(guò)程中要改變航向需要拐彎時(shí)間與拐外半徑。記航跡段li在水平面投影為mi=(xi-xi-1,yi-yi-1),設(shè)無(wú)人機(jī)允許的極限拐彎角為θt,則該約束可被描述成:

(2)極限俯沖角/爬升角。無(wú)人機(jī)在高度方向(z方向)上俯沖與爬升的角度限制于其機(jī)動(dòng)性。因此,可設(shè)定極限大俯沖角/爬升角為θp的約束方程為:

(3)最小航跡段長(zhǎng)度。在飛行過(guò)程中,當(dāng)前飛行姿態(tài)的改變需要無(wú)人機(jī)持續(xù)飛行一段距離,若無(wú)人機(jī)偏航角改變頻繁或者大幅度迂回飛行,則會(huì)擴(kuò)大導(dǎo)航誤差,故應(yīng)盡可能減小航跡長(zhǎng)度。設(shè)定無(wú)人機(jī)的最小飛行航跡段長(zhǎng)度為lmin,則該約束的數(shù)學(xué)描述為:

綜上所述,航跡代價(jià)模型主要由上述因素構(gòu)成,故無(wú)人機(jī)三維航跡代價(jià)模型可表示為:

式中,J1~J5分別表征飛行過(guò)程中的威脅指標(biāo)、油耗指標(biāo)、極限拐彎指標(biāo)、極限俯沖角/爬升角指標(biāo)與最小航跡長(zhǎng)度指標(biāo),wk為相應(yīng)的權(quán)重系數(shù)。
2改進(jìn)的人工蜂群算法
ABC算法是由土耳其KARABOGA D教授提出的一種模擬蜂群協(xié)作覓食行為的新興元啟發(fā)式優(yōu)化算法[10]。在算法中,蜜蜂的種類可分為雇傭蜂、跟隨蜂和偵察蜂3種。設(shè)蜂群種群總數(shù)為N,雇傭蜂和跟隨蜂的數(shù)量各占種群總數(shù)的一半;每個(gè)蜜源均為一個(gè)D維向量,其中D表示需要被優(yōu)化的解個(gè)數(shù)。在無(wú)人機(jī)航跡規(guī)劃問(wèn)題,種群中的每只蜜蜂對(duì)應(yīng)一組可行解,ABC算法通過(guò)3種蜂種的搜索方式尋找搜索空間的最優(yōu)解。同時(shí),在算法中添加自適應(yīng)搜索策略、新型概率選擇策略與Logistic混沌搜索算子。具體的步驟如下所示:
(1)種群初始化。隨機(jī)派出N只蜜蜂尋找到xij(i=1,2,…,N;j=1,2,…,D)蜜源,即可行解。蜜源由式(9)產(chǎn)生:

(2)蜜源收益度計(jì)算。根據(jù)式(10)來(lái)計(jì)算每只蜜蜂初始時(shí)搜索到蜜源的收益度值,并根據(jù)蜜源大小排序,取前N/2組解。

其中,Si是ABC算法中的目標(biāo)函數(shù)值。
(3)雇傭蜂搜索階段。在此搜索階段,蜜源信息會(huì)因?yàn)楣蛡蚍涞倪^(guò)度挖掘而致使算法迭代速率降低[11],故本文采用一個(gè)自適應(yīng)搜索策略來(lái)改進(jìn)原搜索方式,即:
(4)跟隨蜂搜索階段。隨著算法迭代次數(shù)的增加,種群個(gè)體雖會(huì)朝著一個(gè)方向進(jìn)化,但同時(shí)也會(huì)遺漏其他有用信息,從而導(dǎo)致種群多樣性的降低。ABC算法性能的提高在某種程度上依賴于種群多樣性。研究發(fā)現(xiàn),被摒棄的解也含有有用信息[12]。所以,為了使含有較差信息的蜜源同樣能被充分挖掘,本文采用一個(gè)新穎的概率選擇方式,來(lái)保證種群的多樣性:
(6)記錄當(dāng)前最優(yōu)解。當(dāng)算法遇到終止條件時(shí),輸出迭代過(guò)程中的最優(yōu)解。
3仿真實(shí)驗(yàn)
在本節(jié)中,通過(guò)一個(gè)三維航跡規(guī)劃仿真算例對(duì)本文所提PAC-ABC算法的有效性進(jìn)行驗(yàn)證。另外,也引入傳統(tǒng)ABC算法與GA算法與之進(jìn)行比較分析。規(guī)劃空間采用100 km×100 km×100 km的三維空間。空間中共有5座山峰,疊加的地形信息參數(shù)為:

另外,威脅物中的雷達(dá)和高炮的分布信息如表1所示。
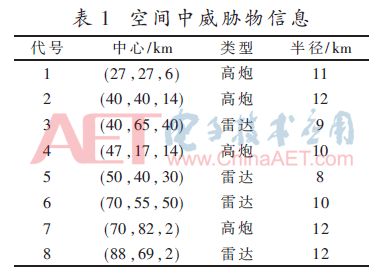
無(wú)人機(jī)飛行的起始點(diǎn)為(0,0,0),目標(biāo)點(diǎn)為(90,80,0),規(guī)劃的維數(shù)D=10。采用PAC-ABC算法、ABC算法和GA算法同時(shí)去搜索最優(yōu)航跡。前兩種算法的初始條件設(shè)置為:N=20,limit=15。而設(shè)置GA算法的條件為:抗體種群數(shù)M=20,交叉因子與變異因子分別為0.8與0.2。3種算法各運(yùn)行10次,每次迭代500次,然后記錄下其中的最優(yōu)解。航跡規(guī)劃的結(jié)果如圖1所示。從圖中可以看出,3種算法均能生成可飛航跡,但是ABC算法與GA算法獲得航跡均要翻越山脊,這會(huì)導(dǎo)致無(wú)人機(jī)被發(fā)現(xiàn)的概率增加;而PAC-ABC算法獲得航跡則沿著山谷飛行,并較其他兩種算法縮短了航程,利于規(guī)避威脅,實(shí)現(xiàn)低空突防。
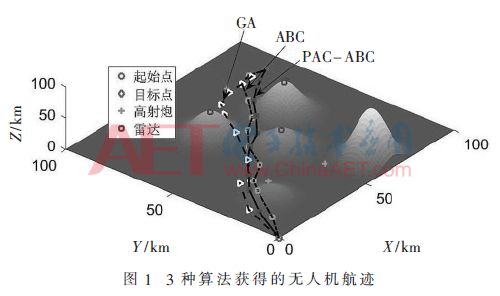
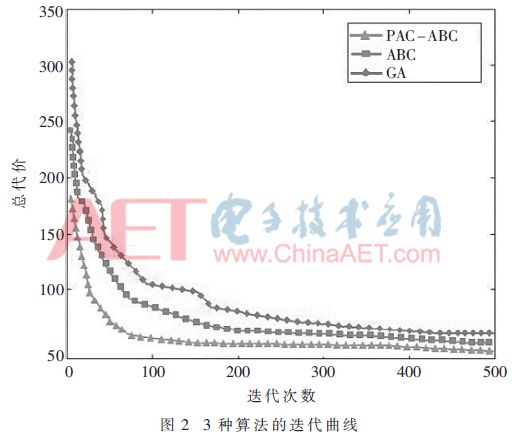
圖2給出了3種算法的迭代曲線,從圖中可以看出本文所提算法的收斂速度最快,在100代左右就能收斂到極值,且航跡代價(jià)為51.231 2,而ABC算法和GA算法的航跡代價(jià)分別為54.998 0和60.621 4。在改進(jìn)策略的作用下,PAC-ABC算法能夠較好地避免局部最優(yōu)值,迅速地尋找到最優(yōu)解。
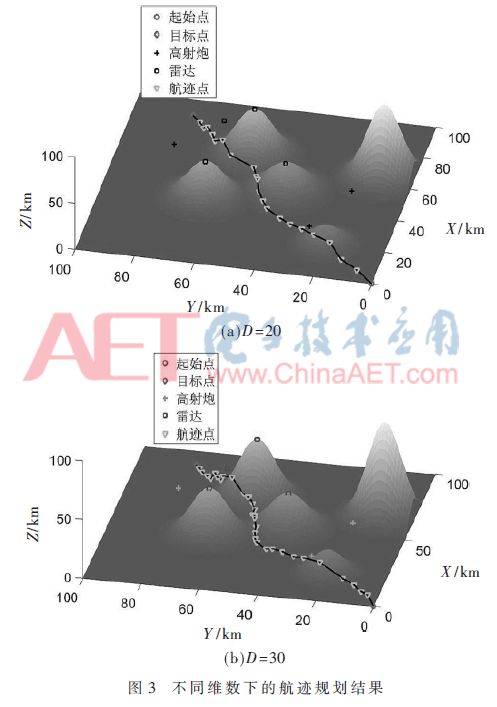
為了進(jìn)一步驗(yàn)證PAC-ABC算法的魯棒性,分別取D為20和30時(shí),評(píng)價(jià)此算法求解無(wú)人機(jī)航跡規(guī)劃問(wèn)題的效果,仿真結(jié)果如圖3所示。從圖中可以看出,隨著維數(shù)的增加,PAC-ABC算法依舊能夠?qū)ふ业捷^好的航跡。這說(shuō)明本文所提算法具有較好的魯棒性。
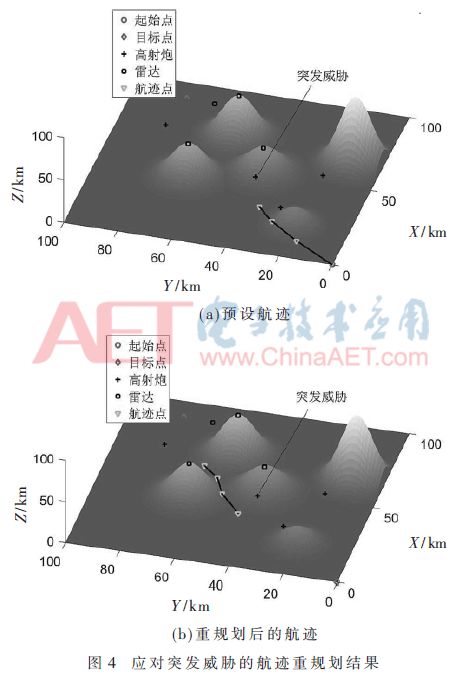
有時(shí),在規(guī)劃空間中隱藏著未被發(fā)現(xiàn)的突發(fā)威脅。當(dāng)無(wú)人機(jī)遇到這些突發(fā)威脅時(shí),需要算法具有重規(guī)劃能力,來(lái)規(guī)避這些威脅。設(shè)無(wú)人機(jī)從起始點(diǎn)(0,0,0)到目標(biāo)點(diǎn)(90,80,0)中,在(40,40,13)點(diǎn)處突然偵察到高炮,如圖4(a)所示。若不改變航跡繼續(xù)飛行,無(wú)人機(jī)則有幾率被擊落,故需要對(duì)其航跡重新規(guī)劃。如圖4(b)所示,通過(guò)PAC-ABC算法對(duì)航跡再次規(guī)劃,可以有效避免突發(fā)威脅,規(guī)劃時(shí)間僅為1.24 s。這說(shuō)明本文所提航跡規(guī)劃算法迭代速率高,具有一定的實(shí)時(shí)性。
4結(jié)論
在處理無(wú)人機(jī)三維航跡規(guī)劃問(wèn)題時(shí),本文提出了一種改進(jìn)人工蜂群算法。在算法中,通過(guò)自適應(yīng)搜索策略、新穎的概率選擇方式以及混沌搜索算子,提高了算法的穩(wěn)定性、搜索快速性與魯棒性。三維航跡規(guī)劃實(shí)驗(yàn)表明:(1)與ABC算法與GA算法相比,PAC-ABC算法能夠更快地獲得最優(yōu)航跡,且航跡代價(jià)分別比前兩者少7.35%和18.33%;(2)隨著解維數(shù)的增加,PAC-ABC算法依舊能夠獲得較好的解,具有很強(qiáng)的魯棒性;(3)在處理突發(fā)威脅時(shí),PAC-ABC算法能夠在較短的時(shí)間內(nèi)實(shí)現(xiàn)局部航跡在規(guī)劃,保證了無(wú)人機(jī)的安全飛行。綜上所述,本文所提算法能夠?yàn)闊o(wú)人機(jī)規(guī)劃出一條可飛且較優(yōu)的飛行路徑。
-
無(wú)人機(jī)
+關(guān)注
關(guān)注
228文章
10336瀏覽量
179609
原文標(biāo)題:【學(xué)術(shù)論文】一種無(wú)人機(jī)三維航跡規(guī)劃算法研究
文章出處:【微信號(hào):ChinaAET,微信公眾號(hào):電子技術(shù)應(yīng)用ChinaAET】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論