") 自動駕駛中激光雷達(dá)和傳感器技術(shù)的應(yīng)用
自動駕駛中激光雷達(dá)和傳感器技術(shù)的應(yīng)用
來源:傳感器技術(shù)
激光雷達(dá)和與之競爭的傳感器技術(shù)(相機(jī)、雷達(dá)和超聲波)加強(qiáng)了對傳感器融合的需要,也對認(rèn)真謹(jǐn)慎地選擇光電探測器、光源和MEMS振鏡提出了更高的要求。
傳感器技術(shù)、成像、雷達(dá)、光探測技術(shù)及測距技術(shù)(激光雷達(dá))、電子技術(shù)和人工智能的進(jìn)步,使數(shù)十種先進(jìn)的駕駛員輔助系統(tǒng)(ADAS)得以實(shí)現(xiàn),包括防撞、盲點(diǎn)監(jiān)測、車道偏離預(yù)警和停車輔助等。通過傳感器融合實(shí)現(xiàn)這些系統(tǒng)的同步運(yùn)行,可以讓完全自動駕駛的車輛監(jiān)視周圍環(huán)境,并警告駕駛員潛在的道路危險,甚至采取獨(dú)立于駕駛員的躲避行動以防止碰撞。
自動駕駛汽車還必須在高速狀態(tài)下區(qū)分和識別前方的物體。通過測距技術(shù),這些自動駕駛汽車必須快速構(gòu)建一張約100m距離內(nèi)的三維(3D)地圖,并在高達(dá)250m距離范圍內(nèi)創(chuàng)建高角分辨率的圖像。如果駕駛員不在場,車輛的人工智能必須做出最佳決策。
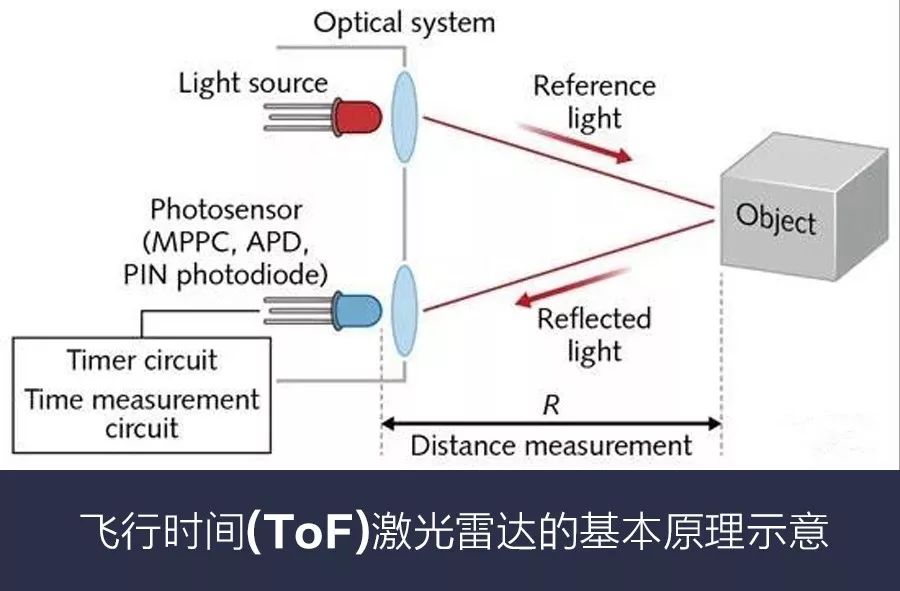
完成這一任務(wù)的幾種基本方法之一,就是測量能量脈沖從自動駕駛車輛到目標(biāo)再返回車輛的往返飛行時間(ToF)。當(dāng)知道“脈沖”通過空氣的速度時,就可以計算到反射點(diǎn)的距離——脈沖可以是超聲波(聲納)、無線電波(雷達(dá))或光(激光雷達(dá))。
美國西部光電展中濱松探測器激光雷達(dá)應(yīng)用演示
使用APD制成的DEMO即使用的ToF法
在這三種ToF技術(shù)中,激光雷達(dá)是提供更高角度分辨率圖像的最佳選擇,因?yàn)樗哂懈〉难苌涮匦院凸馐l(fā)散度,可以比微波雷達(dá)更好地識別相鄰物體。這種高角度分辨率在高速下尤為重要,可以提供足夠的時間來應(yīng)對潛在的危險,如迎面碰撞。
▼
激光光源的選擇
在ToF激光雷達(dá)中,激光發(fā)射持續(xù)時間為τ的脈沖,在發(fā)射瞬間觸發(fā)定時電路中的內(nèi)部時鐘(下文有圖示)。從目標(biāo)反射的光脈沖到達(dá)光電探測器,轉(zhuǎn)換產(chǎn)生電信號輸出使時鐘停止計時。這種測量往返ToF Δt時間的方式可以計算到反射點(diǎn)的距離R。
如果激光和光電探測器實(shí)際上位于同一位置,則距離由下公式確定:
中c是真空中光速,n是傳播介質(zhì)的折射率(對空氣來說大約為1),影響距離分辨率ΔR的因素有兩個:測量Δt時的不確定度δΔt和脈沖寬度的導(dǎo)致的空間誤差w(w = cτ)。
以第一個因素代表測距分辨率ΔR=1/2cδΔτ,而以第二個代表測距分辨率ΔR=1/2 w = 1/2 cτ。如果以5cm的分辨率測量距離,上述關(guān)系式分別意味著δΔt大約為300ps,τ大約為300ps。
飛行時間激光雷達(dá)要求光電探測器和其后的電子學(xué)系統(tǒng)具有很小的時間抖動(δΔτ的主要貢獻(xiàn)因素)以及能夠發(fā)射短脈寬時間的脈沖激光器,例如相對昂貴的皮秒激光器。目前典型的汽車激光雷達(dá)系統(tǒng)中的激光器產(chǎn)生約4ns持續(xù)時間的脈沖,所以減小光束發(fā)散是必要的。
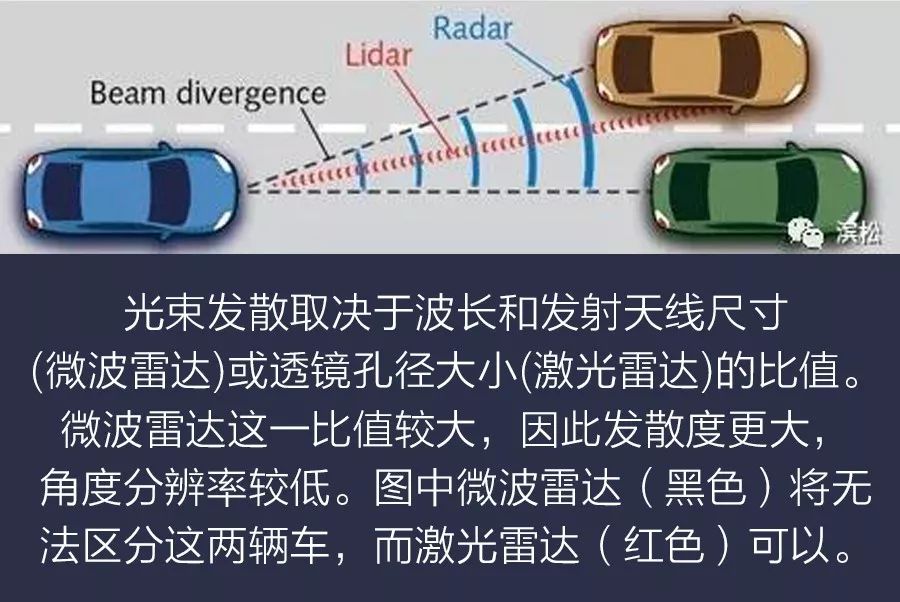
光束發(fā)散取決于波長和發(fā)射天線尺寸(微波雷達(dá))或透鏡孔徑大小(激光雷達(dá))的比值。微波雷達(dá)這一比值較大,因此發(fā)散度更大,角度分辨率較低。圖中微波雷達(dá)(黑色)將無法區(qū)分這兩輛車,而激光雷達(dá)(紅色)可以。
對汽車激光雷達(dá)系統(tǒng)設(shè)計者來說,最關(guān)鍵的選擇之一是光波長。制約這一選擇的因素有幾個:
對人類視覺的安全性
在大氣中的傳播特性
激光的可用性和光電探測器的可用性
兩種最流行的波長是905和1550 nm,905nm的主要優(yōu)點(diǎn)是硅在該波長處吸收光子,而硅基光電探測器通常比探測1550 nm光所需的銦鎵砷(InGaAs)近紅外探測器便宜。
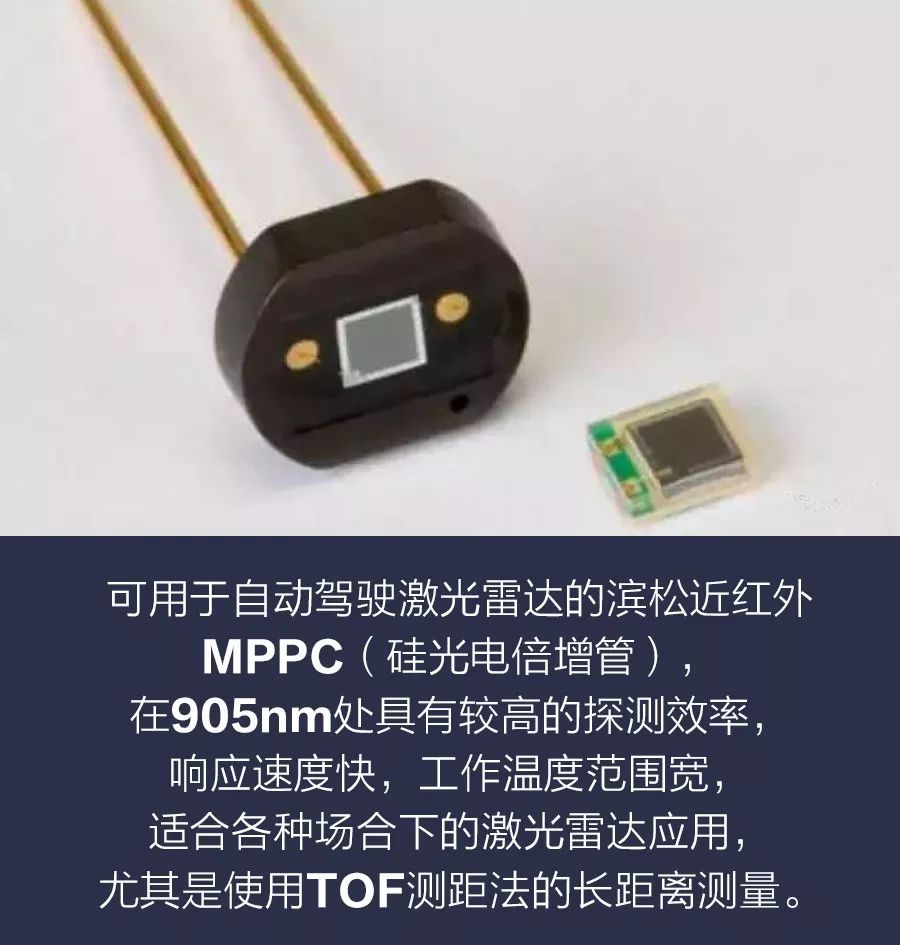
然而,1550nm的人類視覺安全度更高,可以使用單脈沖更大輻射能量的激光——這是光波長選擇的一個重要因素。
大氣衰減(在所有天氣條件下)、空氣中粒子的散射以及目標(biāo)表面的反射率都與波長有關(guān)。由于有各種各樣可能的天氣條件和反射表面,對于這些條件下汽車激光雷達(dá)波長的選擇來說是一個復(fù)雜的問題。在大多數(shù)實(shí)際情況下,905 nm處的光損失更小,因?yàn)樵?550 nm處的水分的吸收率比905 nm處要大。
▼
光探測器的選擇
只有一小部分脈沖發(fā)射的光子可以到達(dá)光電探測器的有效區(qū)域。如果大氣衰減沿脈沖路徑不變化,激光光束發(fā)散度可忽略不計,光斑尺寸小于目標(biāo),入射角垂直于探測器且反射體是朗伯體(所有方向均反射),則光接收峰值功率P(R)為:
P0是發(fā)射激光脈沖的光峰值功率,ρ是目標(biāo)的反射率,A0是接收器孔徑面積,η0是光學(xué)系統(tǒng)透過率,γ是大氣消光系數(shù)。
該方程表明,隨著距離R的增加,接收功率迅速減小。為了合理選擇參數(shù),R=100 m,探測器的活動區(qū)域上返回光子的數(shù)量大約是幾百到幾千,而通常發(fā)射的光子超過1012。這些回波光子與背景光子同時被探測,而背景光子沒有任何有用信息。
采用窄帶濾波器可以減少到達(dá)探測器的背景光,但不能減少到零,背景光的影響使檢測動態(tài)范圍減小,噪聲(背景光子拍攝噪聲)增大。值得注意的是,典型條件下地面太陽輻照度在1550 nm處小于905 nm。


報告:面向自動駕駛Lidar的核心半導(dǎo)體器件介紹
▼
擺脫ToF法的限制

-
傳感器技術(shù)
+關(guān)注
關(guān)注
51文章
340瀏覽量
97849 -
激光雷達(dá)
+關(guān)注
關(guān)注
967文章
3939瀏覽量
189595 -
自動駕駛
+關(guān)注
關(guān)注
783文章
13683瀏覽量
166147
原文標(biāo)題:激光雷達(dá):從光電技術(shù)角度看自動駕駛
文章出處:【微信號:AItists,微信公眾號:人工智能學(xué)家】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論