 基于自然坐標系SVPWM理論分析
基于自然坐標系SVPWM理論分析
400 Hz中頻電源作為軍用雷達、航電設備和部分裝甲車輛設備的基準電源之一[1-2],其電能質量水平關乎武器裝備性能,中頻電源的主要負載為電機類負載,大部分工況下處于不平衡的負載狀態,而傳統中頻電源帶不平衡負載能力較弱,穩定性和可靠性較差,因此研究中頻逆變電源有很重要的意義。
三相四橋臂逆變拓撲即在傳統三相全橋逆變的基礎上增加了一個第四橋臂,將三相負載的中性點與第四橋臂的中點相連,通過第四橋臂來控制中性點電壓,使三相四橋臂逆變器可以產生三相獨立的電壓,使逆變器具有穩定三相電壓對稱輸出的能力。這種逆變拓撲具有控制方法靈活、直流電壓利用率高和無需并聯大的直流電容的優點,避免連接中點形成變壓器,大大減少逆變器的體積重量,減少對各類武器系統、裝甲車輛和航空平臺有限體積的占用,因此得到廣泛的重視和研究。
三相四橋臂逆變拓撲的調制策略主要有脈寬調制[3]、滯環電流控制[4]、空間矢量脈寬調制(Space Vector Pulse-Width Modulation,SVPWM)[5]等策略。其中SVPWM具有易實現數字控制和直流母線電壓利用率高的優點,因此多應用于逆變器調制中。傳統的基于αβγ坐標系的SVPWM策略[6-7],需要反復對三相電壓電流進行坐標變換,運算過程復雜,且必須根據負載情況來確定參考電壓,當負載突變或不明時,參考電壓的軌跡無法確定,導致實時控制困難。文獻[8]提出了一種基于abc自然坐標系的三維空間矢量脈寬調制技術,計算方法簡單,并且可拓展到多電平三相四橋臂逆變器中進行運用,但參考電壓的計算方法尚未給出。
本文基于自然坐標系的SVPWM技術,研究三相四橋臂逆變器的調制策略,通過建立分析四橋臂拓撲的平均電流模型,確定參考電壓,并根據“伏秒平衡”原則計算參考電壓的占空比。由于參考電壓是根據負載電流實時計算出的,因此逆變器在三相不平衡負載條件下可穩定輸出三相對稱電壓,且總諧波畸變率較小,并通過仿真和實驗加以驗證。
1
基于自然坐標系SVPWM理論分析
1.1 空間矢量及電壓矢量的合成與選擇
圖1為三相四橋臂逆變器主電路拓撲。
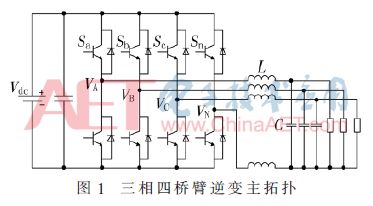
主拓撲有四對橋臂,每對橋臂對應兩種開關狀態,共組成24=16種開關組合狀態,將各橋臂的開關狀態用開關矢量Si表示:

上式中i=a,b,c,n,分別表示逆變器的A、B、C和N相。且需注意同一橋臂的上下兩個開關器件不能同時導通,否則會出現橋臂直通現象,破壞開關器件。根據開關狀態可得到電壓矢量:

結合式(1),可得到逆變器的16種開關組合狀態與空間電壓矢量的對應關系,如表1所示。

表1的16種開關狀態對應空間電壓矢量描繪到abc自然坐標系中,可得如圖2空間電壓矢量圖。
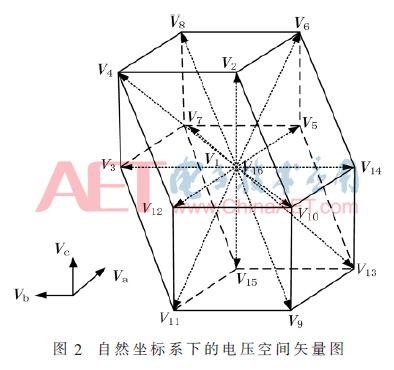
圖2可看作是一個封閉十二面體,可用平面Va=0、Vb=0、Vc=0和平面Va-Vb=0、Va-Vc=0、Vb-Vc=0將十二面體分割為二十四個空間四面體,每個四面體由兩個零電壓矢量(V1、V16)和三個非零電壓矢量構成。只要確定了參考電壓矢量Vref落在哪個四面體中,即可用對應的空間電壓矢量來合成。
為判斷參考電壓矢量落在某個四面體中,將該矢量與Va=0、Vb=0、Vc=0和Va-Vb=0、Va-Vc=0、Vb-Vc=0六個面進行比較,通過判斷比較結果來確定合成參考電壓矢量的四面體。利用二進制計數法,對六個比較結果進行加權計算,用以標記四面體,特做如下定義:
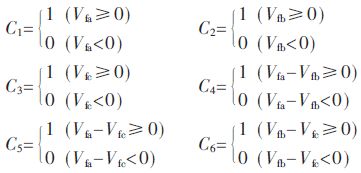
其中Vfa、Vfb、Vfc是參考電壓矢量Vref歸一化到abc自然坐標系下的量,指針函數的表達式為:

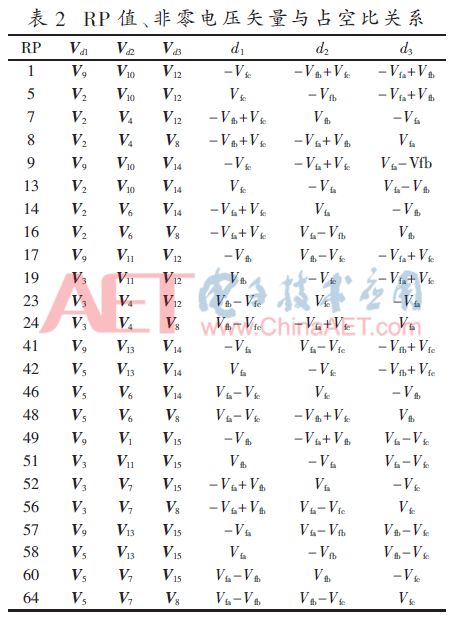
由式(2)計算得RP值見表2,其對應二十四個四面體,RP值確定參考電壓矢量所在四面體,選擇該四面體的非零矢量和零矢量合成參考電壓矢量。
1.2 電壓矢量占空比的計算
參考電壓矢量由非零矢量和零矢量合成,開關電壓矢量的作用時間可根據“伏秒平衡”原則求得:
上式中Vd1、Vd2、Vd3為d1、d2、d3對應的非零開關矢量,且下標a、b、c分別表示開關矢量在abc坐標軸的投影值。確定了RP的值,就可根據參考電壓得到合成的空間矢量和占空比,具體結果見表2。
由表2可知,通過計算RP值來確定空間四面體、開關電壓矢量和占空比的策略,相比于在αβγ坐標系的占空比求取更簡單,易于數字化控制技術的實現。
1.3 參考電壓矢量的計算
建立abc坐標系下三相四橋臂逆變器平均電流模型[9],如圖3所示,輸出電壓等效為受控電壓源。
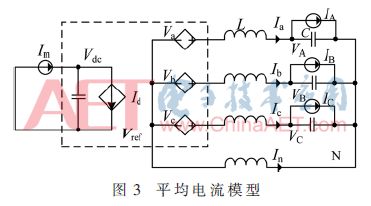
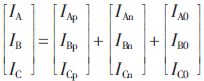
IA,IB,IC為等效成電流源的三相負載電流,可根據對稱分量法將其分解為正序Ip、負序In和零序I0分量,下角標p,n,0分別表示正序、負序和零序。
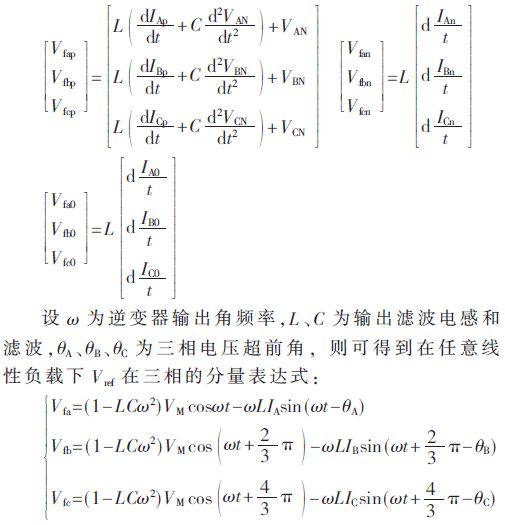
且三相電壓、電流對稱輸出,VM表示輸出電壓的額定值,則三相電壓表達式為:
由于三相電壓等效圖相同,以A相進行對稱分量分析。圖4為A相正序、負序、零序分量等效圖。
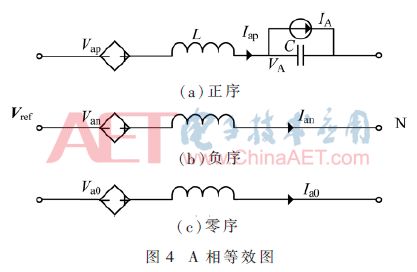
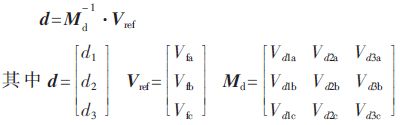
依據電路理論分析參考電壓矢量Vref的正序、負序和零序分量則可表示為:
分析可知,只要檢測三相負載電流即可得到參考電壓,當負載變化時DSP可根據負載電流的變化計算出每相參考電壓,從而控制三相電壓對稱輸出。
2
仿真分析
為驗證基于自然坐標系的SVPWM策略的可行性和有效性,使用仿真軟件MATLAB/Simulink建立基于SVPWM策略的三相四橋臂逆變器仿真電路,具體仿真參數為:設計總輸出功率為6 kV·A,直流側輸入電壓300 V,功率器件開關頻率為20 kHz,輸出三相電壓有效值為115 V,頻率為400 Hz,輸出濾波電路濾波電感1 mH,濾波電容20 μF。
主要在以下負載情況對逆變器進行仿真分析:(1)阻性不平衡負載;(2)阻感性和阻容性不平衡負載。
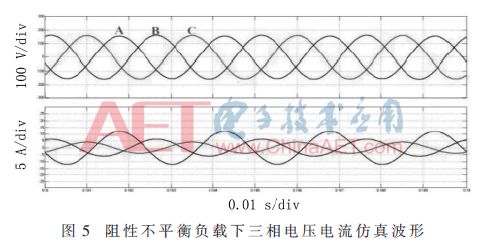
三相阻性不平衡負載分別為13 Ω、26 Ω和40 Ω,逆變器三相電壓和電流的仿真結果如圖5所示。
逆變器帶三相阻感性和阻容性不平衡負載,其中A相13 Ω和10 mH感性負載,B相純阻性負載13 Ω,C相13 Ω和10 μF容性負載,仿真結果如圖6所示。
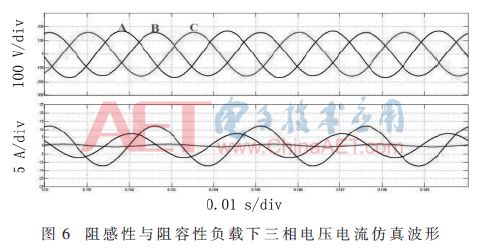
分析仿真結果可看出,基于自然坐標系SVPWM策略的三相四橋臂逆變器在不平衡負載條件下,三相輸出電壓波形較為對稱,且經過仿真系統FFT分析三相電壓波形的總諧波畸變率THD小于3%。
3
實驗結果
為驗證方案可行性,設計了一臺實驗樣機,基于DSP(TMS320F28069)完成SVPWM策略對功率器件的矢量控制,其中實驗樣機的主要參數為:輸出總功率為6 kV·A,輸入直流母線電壓300 V,輸出電壓有效值和頻率為115 V/400 Hz,開關頻率為20 kHz,輸出濾波器的電感和電容值分別為1 mH和20 μF。主要測試了在不平衡負載下逆變器的輸出能力,記錄了不平衡負載下的三相電壓電流和中線電流波形。
圖7分別給出了三相不平衡阻感性和阻容性負載時,三相電壓和A相電流波形,可見逆變器輸出適應性強,在各種不平衡負載條件下均能使三相電壓對稱輸出。
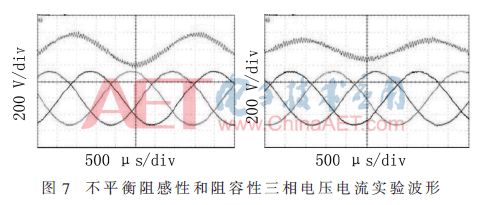
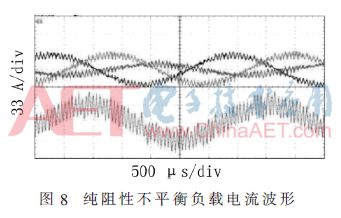
圖8為純阻性1/3不平衡負載下三相濾波和中線電感電流,由于電感影響電流存在較小脈動,中線電流脈動較為明顯,但電壓波形仍滿足THD<3%。
4
結論
基于abc自然坐標系下的SVPWM策略的三相四橋臂中頻逆變器與αβγ坐標系空間矢量調制相比,一方面省去了復雜的坐標變換,另一方面在空間四面體的選擇和開關矢量占空比計算上也更簡單,易于實現數字化控制和DSP程序編寫。本文建立了三相四橋臂平均電流模型,分析并給出了空間參考電壓的計算方法,最后經過仿真和實驗驗證了SVPWM策略的中頻逆變器具有在不平衡和非線性負載下三相穩定對稱輸出的能力,具有一定的實用價值。
-
逆變器
+關注
關注
283文章
4694瀏覽量
206357 -
空間矢量
+關注
關注
1文章
24瀏覽量
11290 -
SVPWM
+關注
關注
14文章
614瀏覽量
90583
原文標題:【學術論文】自然坐標系SVPWM四橋臂中頻逆變器調制策略研究
文章出處:【微信號:ChinaAET,微信公眾號:電子技術應用ChinaAET】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

機器人基坐標系標定方法研究
OPENGL坐標系介紹 世界坐標系和當前繪圖坐標系區別

帶你來剖析機器人的坐標系吧!
自動駕駛各個坐標系

三坐標如何建立坐標系?

世界坐標系、相機坐標系、圖像坐標系、像素坐標系之間的關系

深度剖析機器人的四大坐標系

應用衛星通信領域的一個坐標轉換過程—機體坐標系與ENU坐標系的轉換






 工商網監
工商網監
評論