") 一種運(yùn)動(dòng)手表的設(shè)計(jì),運(yùn)動(dòng)狀態(tài)識別總體方案
一種運(yùn)動(dòng)手表的設(shè)計(jì),運(yùn)動(dòng)狀態(tài)識別總體方案
摘要:為了彌補(bǔ)市場上現(xiàn)有產(chǎn)品缺少對乒乓球和羽毛球運(yùn)動(dòng)狀態(tài)識別的現(xiàn)狀,設(shè)計(jì)了一個(gè)佩戴于持球拍手腕就可以識別這兩種運(yùn)動(dòng)中多種狀態(tài)的手表。其硬件主要采用STM32F103C8T6單片機(jī)、MPU6050傳感器、藍(lán)牙串口模塊。運(yùn)動(dòng)狀態(tài)識別實(shí)現(xiàn)方法:由3軸加速度和3軸角速度計(jì)算出以大地坐標(biāo)為參考系的3軸角度,數(shù)據(jù)經(jīng)過高通濾波、平滑、數(shù)據(jù)分窗的預(yù)處理后進(jìn)行特征值提取;再依據(jù)隨機(jī)森林分類識別算法,識別乒乓球、羽毛球運(yùn)動(dòng)過程中的多種狀態(tài)。該手表具有硬件成本低、體積小、功耗低等特點(diǎn),經(jīng)過測試,其識別率可達(dá)90%以上。
0 引言
近年來穿戴式設(shè)備是開發(fā)的熱點(diǎn)項(xiàng)目,各種品牌的運(yùn)動(dòng)手表、手環(huán)層出不窮,穿戴式運(yùn)動(dòng)狀態(tài)識別設(shè)備的應(yīng)用前景可觀。現(xiàn)在市場上的產(chǎn)品對運(yùn)動(dòng)狀態(tài)識別集中在識別某個(gè)時(shí)間段進(jìn)行的某種運(yùn)動(dòng),如走路、跑步、睡眠,缺少對乒乓球、羽毛球運(yùn)動(dòng)識別的設(shè)備。而專業(yè)的運(yùn)動(dòng)識別的設(shè)備集中在視頻圖像的分析和不同部位多傳感器裝置檢測分析]兩種方式,兩種方式設(shè)備體積大、成本高,只適合在實(shí)驗(yàn)室中使用,不適合向普通大眾推廣。目前運(yùn)動(dòng)狀態(tài)分類識別算法主要有動(dòng)態(tài)K近鄰、決策樹、隨機(jī)森林、支持向量機(jī)、神經(jīng)網(wǎng)絡(luò)等。
為了滿足乒乓球和羽毛球業(yè)余運(yùn)動(dòng)愛好者對運(yùn)動(dòng)過程動(dòng)作狀態(tài)識別記錄的要求,本文將介紹一種運(yùn)動(dòng)手表的設(shè)計(jì)。它由簡單硬件構(gòu)成,利用在時(shí)域上分析的隨機(jī)森林分類算法就可以識別乒乓球和羽毛球運(yùn)動(dòng)的多種狀態(tài)。本設(shè)計(jì)具有體積小、功耗低、成本低的特點(diǎn),可以嵌入到現(xiàn)在已有的智能手表中,做到功能升級。
1 運(yùn)動(dòng)狀態(tài)識別總體方案
1.1 運(yùn)動(dòng)手表硬件設(shè)計(jì)
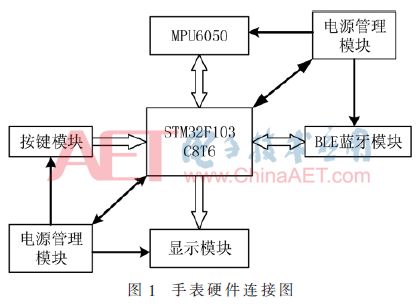
乒乓球/羽毛球運(yùn)動(dòng)狀態(tài)識別手表的硬件主要由控制處理核心STM32單片機(jī)、MPU6050傳感器模塊、BLE 藍(lán)牙模塊、按鍵模塊、顯示模塊、電源管理模塊6部分組成。手表系統(tǒng)工作原理為: 控制處理核心STM32F103通過IIC接口讀取MPU6050的加速度計(jì)和陀螺儀數(shù)據(jù),利用數(shù)字運(yùn)動(dòng)處理器(DMP)輸出四元數(shù)后解算得到3軸歐拉角[7]。經(jīng)過數(shù)據(jù)濾波后用相應(yīng)的識別算法對運(yùn)動(dòng)狀態(tài)進(jìn)行識別,將識別的信息用OLED顯示屏顯示并通過藍(lán)牙模塊發(fā)送到上位機(jī)。各個(gè)模塊的功能如下。
(1)控制處理核心:選擇意法半導(dǎo)體STM32F103C8T6,它控制整個(gè)系統(tǒng)的各個(gè)模塊工作狀態(tài)、傳感器數(shù)據(jù)的處理和識別算法的實(shí)現(xiàn)。它運(yùn)算速度快、體積小、功耗低、外設(shè)豐富,滿足腕戴式手表對體積、速度、功耗的要求。
(2)傳感器模塊:傳感器采用MEMS數(shù)字傳感器MPU6050,它由整合了加速度計(jì)、陀螺儀的6軸傳感器和一個(gè)可擴(kuò)展的DMP組成。相比于多傳感器的方案,它避免了時(shí)間軸之差的問題,并減小了體積[8]。傳感器通過IIC接口將數(shù)據(jù)傳輸?shù)絾纹瑱C(jī)中。
(3)BLE藍(lán)牙模塊:選用型號為CC2541的BLE藍(lán)牙串口模塊,BLE技術(shù)具有低成本、低功耗、短距離的特點(diǎn)。該藍(lán)牙模塊最高支持2 Mbit/s的傳輸速率,工作電流小于20 mA,滿足系統(tǒng)UART串口設(shè)計(jì)的115 200 bit/s波特率的通信要求。
(4)按鍵模塊:主要完成模式選擇以及手表的開關(guān)機(jī)。
(5)顯示模塊:選用0.96英寸OLED顯示屏,顯示單元能夠自發(fā)光。全屏點(diǎn)亮?xí)r功耗為0.08 W,正常全屏顯示漢字僅需0.06 W,很符合手表低功耗的要求。
(6)電源管理模塊:選用 TD8208升壓芯片將3.7 V鋰電池升壓到5 V,再經(jīng)過AP2125K-3.3芯片降壓到3.3 V。兩款電源芯片均有輸出使能端,可通過控制使能端實(shí)現(xiàn)對其他模塊的電源管理。
手表硬件連接圖如圖1所示。
1.2 運(yùn)動(dòng)手表系統(tǒng)狀態(tài)設(shè)計(jì)
系統(tǒng)設(shè)計(jì)主要有關(guān)機(jī)狀態(tài)、時(shí)間顯示狀態(tài)、模式選擇狀態(tài)、乒乓球模式、羽毛球模式、自識別模式6個(gè)狀態(tài),各個(gè)狀態(tài)通過按鍵選擇進(jìn)行切換,狀態(tài)轉(zhuǎn)換圖如圖2所示。
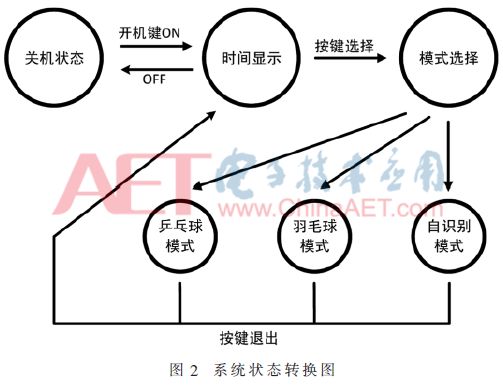
由圖2可知,系統(tǒng)初始狀態(tài)為關(guān)機(jī)狀態(tài),通過長按開關(guān)機(jī)鍵使系統(tǒng)開機(jī)并進(jìn)入時(shí)間顯示狀態(tài)。如果不進(jìn)行按鍵選擇,系統(tǒng)將保持在時(shí)間顯示狀態(tài)。如果按動(dòng)選擇按鍵,系統(tǒng)將跳轉(zhuǎn)到模式選擇狀態(tài),再通過按動(dòng)模式選擇按鍵進(jìn)入對應(yīng)的工作模式。如果進(jìn)入乒乓球模式或羽毛球模式,就對運(yùn)動(dòng)中揮臂、揮拍、正反手等動(dòng)作進(jìn)行識別。如果選擇自識別模式,系統(tǒng)先識別當(dāng)前運(yùn)動(dòng)是乒乓球運(yùn)動(dòng)還是羽毛球運(yùn)動(dòng),識別成功后再自動(dòng)跳轉(zhuǎn)到對應(yīng)的模式下進(jìn)行運(yùn)動(dòng)狀態(tài)識別。如果需要重新選擇運(yùn)動(dòng)模式,通過返回按鍵使系統(tǒng)返回到時(shí)間顯示狀態(tài),重復(fù)上述選擇方法進(jìn)行模式選擇。
2 運(yùn)動(dòng)狀態(tài)識別算法設(shè)計(jì)
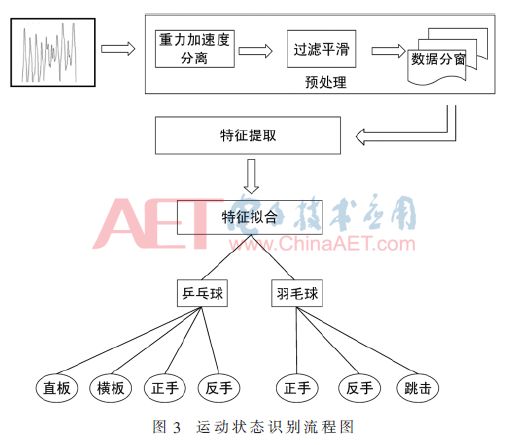
運(yùn)動(dòng)狀態(tài)識別主要由數(shù)據(jù)采集、數(shù)據(jù)預(yù)處理、特征提取、分類識別4部分組成。識別流程及結(jié)構(gòu)如圖3所示。
2.1 數(shù)據(jù)采集
STM32F103C8T6單片機(jī)通過IIC接口讀取MPU6050的加速度、角速度、角度數(shù)據(jù),將采集的數(shù)據(jù)緩沖到各自對應(yīng)的數(shù)組中,完成基本的數(shù)據(jù)采集。
2.2 數(shù)據(jù)預(yù)處理
數(shù)據(jù)預(yù)處理分3步完成,依次為重力加速度分離、過濾平滑、數(shù)據(jù)分窗[4]。
(1)重力加速度分離:加速度傳感器輸出的原始數(shù)據(jù)中包含重力加速度分量,而X、Y、Z軸是固定的,運(yùn)動(dòng)手表發(fā)生普通旋轉(zhuǎn)和翻轉(zhuǎn)時(shí),重力加速度則對3個(gè)軸產(chǎn)生加速度分量。為了避免重力加速度分量引進(jìn)的干擾,本設(shè)計(jì)對傳感器采集的3軸加速度進(jìn)行重力加速度分離。重力加速度分離采用高通濾波的方法[5],求解公式如下:

式中G代表各軸重力加速度分量,A代表加速度傳感器原始測量數(shù)值。提取出重力加速度分量后,用加速度傳感器原始數(shù)值減去重力加速度分量得到實(shí)際運(yùn)動(dòng)產(chǎn)生的加速度值。
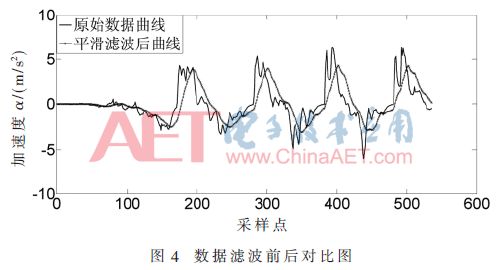
(2)過濾平滑:數(shù)據(jù)的平滑與過濾是為了過濾噪聲和異常數(shù)據(jù),本設(shè)計(jì)采用連續(xù)滑動(dòng)20點(diǎn)均值做平滑濾波,即設(shè)置一個(gè)容量為20個(gè)數(shù)據(jù)點(diǎn)的FIFO,把FIFO內(nèi)的20個(gè)數(shù)據(jù)點(diǎn)的均值作為一個(gè)新的采樣點(diǎn),且濾波后使得提取的特征具有更明顯的區(qū)分度。數(shù)據(jù)平滑處理前后波形圖如圖4所示。
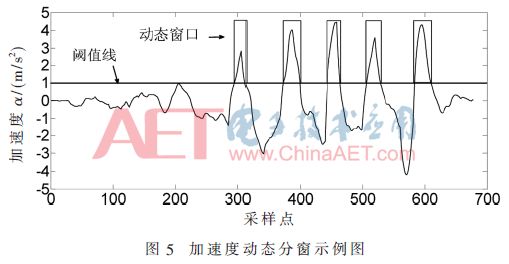
(3)數(shù)據(jù)分窗:本設(shè)計(jì)采用動(dòng)態(tài)窗口的方法對數(shù)據(jù)進(jìn)行分窗處理,窗口大小的設(shè)置是一個(gè)不定的參數(shù),通過實(shí)驗(yàn)事先設(shè)置好3軸加速度的閾值,當(dāng)X、Y、Z任一個(gè)軸加速度值大于對應(yīng)的閾值時(shí),觸發(fā)開啟窗口,當(dāng)觸發(fā)開啟窗口的那個(gè)軸的加速度值小于對應(yīng)的閾值時(shí)就關(guān)閉窗口。即系統(tǒng)窗口只顯示加速度大于閾值的這段時(shí)間內(nèi)的數(shù)據(jù)。因?yàn)橹挥羞\(yùn)動(dòng)時(shí)才會(huì)產(chǎn)生相對較大的加速度,而系統(tǒng)主要識別運(yùn)動(dòng)過程中的不同狀態(tài),所以這樣就無需對非運(yùn)動(dòng)狀態(tài)下進(jìn)行識別,減少識別誤差。加速度動(dòng)態(tài)分窗示例圖如圖5所示。
2.3 特征提取
特征提取集中在窗口開啟的這段時(shí)間內(nèi),主要提取各軸加速度、角速度、角度的最大及最小值和角度的積分面積等主要特征[9]。
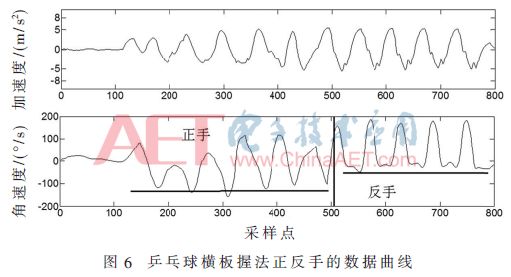
以乒乓球橫板握法正反手的一組數(shù)據(jù)為例,如圖6所示,X軸角速度的最小值在正反手揮拍中有明顯差別,所以將X軸角速度的最小值作為識別正反手的一個(gè)重要特征。
本設(shè)計(jì)只使用了最大值、最小值、積分面積3個(gè)統(tǒng)計(jì)量作為特征,并沒有使用復(fù)雜的時(shí)頻特征和頻域特征,主要有兩個(gè)原因:
(1)經(jīng)過試驗(yàn)發(fā)現(xiàn),最大值、最小值、積分面積這3個(gè)特征在運(yùn)動(dòng)狀態(tài)的識別中區(qū)分度較大,已經(jīng)能夠達(dá)到一個(gè)較好的識別效果;
(2)本手表是基于STM32單片機(jī)平臺設(shè)計(jì)的,其浮點(diǎn)計(jì)算能力有限,不適合提取計(jì)算量較大的時(shí)頻特征和頻域特征[4]。
所以本設(shè)計(jì)中沒有使用時(shí)頻特征和頻域特征,而把前期的數(shù)據(jù)處理作為識別的重要前提,并通過基于時(shí)間跨度的動(dòng)態(tài)分窗方式,結(jié)合隨機(jī)森林算法,對不同的運(yùn)動(dòng)狀態(tài)進(jìn)行分類識別。
2.4 分類識別
基于本設(shè)計(jì)自身硬件屬性,對比并試驗(yàn)了當(dāng)前普遍使用的識別分類算法,結(jié)果發(fā)現(xiàn)隨機(jī)森林分類算法在本系統(tǒng)上有著計(jì)算效率和識別準(zhǔn)確率較高的特點(diǎn),因此選擇隨機(jī)森林作為本系統(tǒng)的分類算法。隨機(jī)森林算法實(shí)現(xiàn)原理圖如圖7所示。
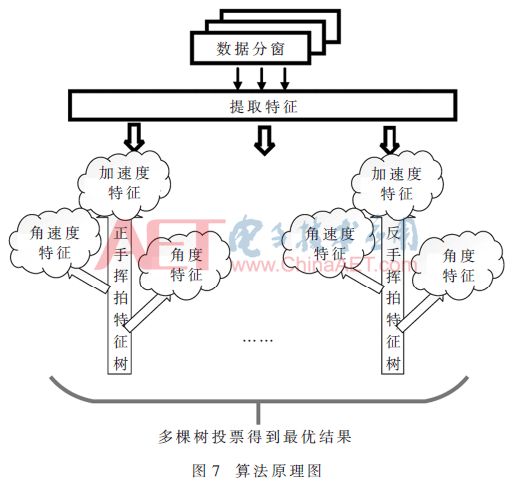
通過大量的測試實(shí)驗(yàn)最終確定本設(shè)計(jì)選取X軸角速度最大值和最小值、X軸角度最小值和積分面積、Y軸角速度最小值、Y軸角度最大值和最小值、Z軸角速度最大值8個(gè)有著明顯區(qū)分度的特征值。每次在動(dòng)態(tài)窗口中提取上述8個(gè)特征,將提取的特征依次和每個(gè)運(yùn)動(dòng)狀態(tài)的特征樹進(jìn)行擬合,擬合特征最多的那棵樹就識別為本次運(yùn)動(dòng)的狀態(tài)。
特征區(qū)間的設(shè)定上,本設(shè)計(jì)以專業(yè)運(yùn)動(dòng)員的訓(xùn)練數(shù)據(jù)為參考,如圖6所示的數(shù)據(jù),橫板握法的正反手各自特征樹上X軸角速度特征區(qū)間分別為[-150 -80],[-70 0]。其他特征區(qū)間的參數(shù)整定方法同上,這里不再贅述。
3 手表測試
本次測試方法為隨機(jī)選取乒乓球和羽毛球業(yè)余運(yùn)動(dòng)員各一位,使用本手表在相應(yīng)的運(yùn)動(dòng)中進(jìn)行測試,主要記錄人工識別計(jì)數(shù)和設(shè)備識別計(jì)數(shù),并做比對,分析誤差。具體測試數(shù)據(jù)如表1、表2所示。


從實(shí)驗(yàn)結(jié)果可以看出,設(shè)備識別計(jì)數(shù)準(zhǔn)確率在90%以上。運(yùn)動(dòng)中對正手揮拍識別比實(shí)際揮拍數(shù)多,而反手揮拍識別計(jì)數(shù)要實(shí)際揮拍數(shù)少,分析原因發(fā)現(xiàn),因?yàn)橄到y(tǒng)動(dòng)態(tài)窗口開啟的閾值是預(yù)先設(shè)定值,反手揮拍中動(dòng)作幅度比較小時(shí)加速度值沒有達(dá)到開啟閾值,所以計(jì)數(shù)要小于實(shí)際數(shù)。可以通過減小開啟閾值來提升反手揮拍的識別率,但同樣不能使開啟閾值太小,否則手腕部一些非運(yùn)動(dòng)狀態(tài)也會(huì)觸發(fā)開啟窗口引起識別誤差,使正手揮拍識別數(shù)遠(yuǎn)大于實(shí)際數(shù)。因此窗口開啟閾值的設(shè)定也是設(shè)計(jì)的關(guān)鍵。本系統(tǒng)乒乓球模式下閾值為1 m/s2,羽毛球模式下閾值為1.2 m/s2。
4 結(jié)論
本文設(shè)計(jì)的手表采用STM32F103+MPU6050方案,成本低、功耗低、體積小,且對乒乓球和羽毛球運(yùn)動(dòng)過程中主要運(yùn)動(dòng)特征識別較為準(zhǔn)確,效果較好,識別率均在90%以上。該手表滿足普通大眾的應(yīng)用,可進(jìn)一步推廣。
-
傳感器
+關(guān)注
關(guān)注
2548文章
50678瀏覽量
751997 -
神經(jīng)網(wǎng)絡(luò)
+關(guān)注
關(guān)注
42文章
4762瀏覽量
100539 -
電源芯片
+關(guān)注
關(guān)注
42文章
1078瀏覽量
76928
原文標(biāo)題:【學(xué)術(shù)論文】乒乓球/羽毛球運(yùn)動(dòng)狀態(tài)識別手表的設(shè)計(jì)
文章出處:【微信號:ChinaAET,微信公眾號:電子技術(shù)應(yīng)用ChinaAET】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
【FireBLE申請】智能運(yùn)動(dòng)手表
面向運(yùn)動(dòng)手表的Chronos怎么樣?
分享一種不錯(cuò)的基于公共交換電話網(wǎng)的智能家居系統(tǒng)的總體方案
高價(jià)尋求基于STM32運(yùn)動(dòng)手表屏幕開發(fā)
卡西歐WSD-F20運(yùn)動(dòng)手表怎么樣?運(yùn)動(dòng)手表里最智能的
AMAZFIT智能運(yùn)動(dòng)手表2以豐富的功能模式和專業(yè)運(yùn)動(dòng)數(shù)據(jù),成為千元價(jià)位專業(yè)運(yùn)動(dòng)手表的標(biāo)桿之作
關(guān)于乒乓球/羽毛球運(yùn)動(dòng)狀態(tài)識別手表的設(shè)計(jì)
華米米動(dòng)手表青春版評測 一款續(xù)航足夠持久的運(yùn)動(dòng)手表
AMAZFIT智能運(yùn)動(dòng)手表2評測 千元價(jià)位用于運(yùn)動(dòng)監(jiān)測可謂性價(jià)比之選
咕咚GPS運(yùn)動(dòng)手表S1評測 具備了大部分GPS運(yùn)動(dòng)手表的質(zhì)地和功能
華米Amazfit智能運(yùn)動(dòng)手表將兩種場景深度融合
Amazfit智能運(yùn)動(dòng)手表3系列將迎重大更新 運(yùn)動(dòng)模式將增至80種
運(yùn)動(dòng)手表氣密性防水檢測是怎么做的
運(yùn)動(dòng)手表主板芯片包封用膠方案

漢思新材料:智能運(yùn)動(dòng)手表主板芯片底部填充包封用膠方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論