 單片機實戰之如何藍牙控制風扇
單片機實戰之如何藍牙控制風扇
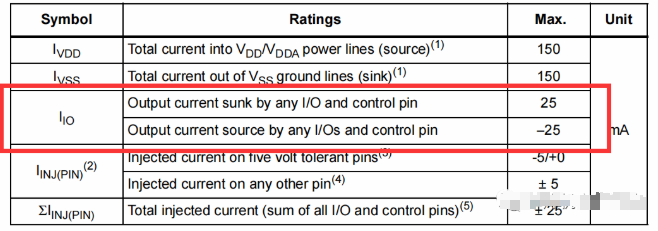
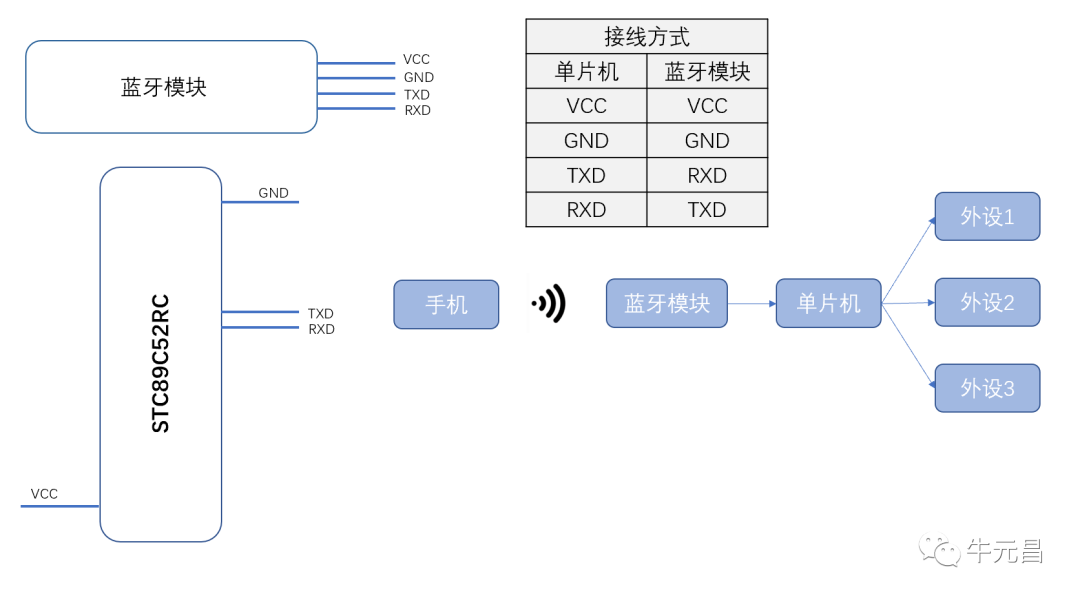
首先買一個藍牙模塊,我買的是HC-06,在手機上下載一個藍牙串口調試助手,等同于單片機的UART串口通信,利用BUFF來獲取接受到的數據,這里只需要重視一個問題,就是測試編碼,如果APP發送0xFF,(APP藍牙串口調試助手已經支持手動設置按鈕名字和發送的字符了)但是藍牙模塊很有可能接受到的是0xF8,0xF2,0xFE。所以這里我們首先應該測試編碼。HC-06一般有5個端口,RX,TX,VCC,GND,AT,AT這里我們沒有用到,是指更改密碼,默認密碼一般是1234或者0000,把VCC和GND接好,然后RX和TX分別和單片機的TX和RX相連接(就是P3^0和P3^1,切記要相反連接),然后我們按照一般的UART串口通信就可以啦,檢測接受到BUFF數據,然后switch就可以實現相應的功能。
#include
#define uchar unsigned char
#define uint unsigned int
sbit PWM=P1^0;
void UsartConfiguration();
unsigned int temp=0;
unsigned char zhuanshu=20;
unsigned int cnt=0;
unsigned char receiveData;
unsigned int dingshi=0;
unsigned char min=1;
void main(void)
{
unsigned int i=3000;
UsartConfiguration();
while(1)
{
if(cnt>=3000)
{
cnt=0;
Ds18b20ReadTemp(); //3s檢測一次溫度
}
switch(receiveData)
{
case 177:ET0=1;zhuanshu=20;receiveData=0;break; // 數字1 風扇啟動
case 178:zhuanshu=0;while(i--);ET0=0;receiveData=0;break; //數字2 風扇停止 由于IO口默認高電平 所以要讓zhuanshu=0
case 179:zhuanshu=30;break;//數字3 低擋
case 180:zhuanshu=50;break;//數字4 中擋
case 181:zhuanshu=70;break;// 數字5高擋
case 182: // 數字6自動根據溫度調節轉速
{
if(temp<3200)
{
zhuanshu=25;
}
if((temp>3200)&&(temp<3300))
{
zhuanshu=30;
}
if((temp>3400)&&(temp<3600))
{
zhuanshu=50;
}
if((temp>3200)&&(temp<3300))
{
zhuanshu=60;
}
} break;
case 183: //定時時間數字7
{
static dingshi=0;
if(dingshi>=60000) //1分鐘一個基準
{
min--;
dingshi=0;
if(min==0)
{
ET0=0;
zhuanshu=0;
}
}
break;
case 184: receiveData=0;min++;break; //增加時間 數字8
case 185: receiveData=0;min--;break; //減少時間 數字9
}
}
}
}
void UsartConfiguration()
{
SCON=0X50; //設置為工作方式1
TMOD=0X21; //設置計數器工作方式2
PCON=0X80; //波特率加倍
TH0 = 0xFC;
TL0 = 0x66;
TH1=0XF9; //計數器初始值設置,注意波特率是9600的
TL1=0XF9;
ET0=1;
ES=1; //打開接收中斷
EA=1; //打開總中斷
TR1=1;
TR0=1; //打開計數器
}
void Usart() interrupt 4
{
receiveData=SBUF; //出去接收到的數據
RI = 0; //清除接收中斷標志位
}
void Time1(void) interrupt 1 //3 為定時器1的中斷號 1 定時器0的中斷號 0 外部中斷1 2 外部中斷2 4 串口中斷
{
static unsigned char timer1=0;
TH0 = 0xF6; //重新賦初值
TL0 = 0x66;
timer1++;
cnt++;
dingshi++;
if(dingshi>=60050)
{
dingshi=0;
}
if(timer1>100) //PWM周期為100*0.5ms
{
timer1=0;
}
if(timer1
{
PWM=1;
}
else
{
PWM=0;
}
}
void Delay1ms(uint y) //延時程序
{
uint x;
for( ; y>0; y--)
{
for(x=110; x>0; x--);
}
}
uchar Ds18b20Init() //溫度的子函數
{
uchar i;
DSPORT = 0; //將總線拉低480us~960us
i = 70;
while(i--);//延時642us
DSPORT = 1; //然后拉高總線,如果DS18B20做出反應會將在15us~60us后總線拉低
i = 0;
while(DSPORT) //等待DS18B20拉低總線
{
i++;
if(i>5)//等待>5MS
{
return 0;//初始化失敗
}
Delay1ms(1);
}
return 1;//初始化成功
}
void Ds18b20WriteByte(uchar dat)
{
uint i, j;
for(j=0; j<8; j++)
{
DSPORT = 0; //每寫入一位數據之前先把總線拉低1us
i++;
DSPORT = dat & 0x01; //然后寫入一個數據,從最低位開始
i=6;
while(i--); //延時68us,持續時間最少60us
DSPORT = 1; //然后釋放總線,至少1us給總線恢復時間才能接著寫入第二個數值
dat >>= 1;
}
}
uchar Ds18b20ReadByte()
{
uchar byte, bi;
uint i, j;
for(j=8; j>0; j--)
{
DSPORT = 0;//先將總線拉低1us
i++;
DSPORT = 1;//然后釋放總線
i++;
i++;//延時6us等待數據穩定
bi = DSPORT; //讀取數據,從最低位開始讀取
/*將byte左移一位,然后與上右移7位后的bi,注意移動之后移掉那位補0。*/
byte = (byte >> 1) | (bi << 7);
i = 4; //讀取完之后等待48us再接著讀取下一個數
while(i--);
}
return byte;
}
void Ds18b20ChangTemp()
{
Ds18b20Init();
Delay1ms(1);
Ds18b20WriteByte(0xcc);//跳過ROM操作命令
Ds18b20WriteByte(0x44); //溫度轉換命令
// Delay1ms(100);//等待轉換成功,而如果你是一直刷著的話,就不用這個延時了
}
void Ds18b20ReadTempCom()
{
Ds18b20Init();
Delay1ms(1);
Ds18b20WriteByte(0xcc);//跳過ROM操作命令
Ds18b20WriteByte(0xbe);//發送讀取溫度命令
}
void Ds18b20ReadTemp()
{
float tp;
int temp1 = 0;
uchar tmh, tml;
Ds18b20ChangTemp();//先寫入轉換命令
Ds18b20ReadTempCom();//然后等待轉換完后發送讀取溫度命令
tml = Ds18b20ReadByte();//讀取溫度值共16位,先讀低字節
tmh = Ds18b20ReadByte();//再讀高字節
temp1 = tmh;
temp1 <<= 8;
temp1 |= tml;
if(temp1< 0)
{
temp1=temp1-1;
temp1=~temp1;
tp=temp1;
temp1=tp*0.0625*100+0.5;
}
else
{
tp=temp1;
temp1=tp*0.0625*100+0.5;
}
temp=temp1%10000;
}
-
51單片機
+關注
關注
273文章
5697瀏覽量
123204 -
藍牙串口
+關注
關注
1文章
11瀏覽量
7283
原文標題:單片機項目:51單片機之藍牙控制風扇
文章出處:【微信號:mcu168,微信公眾號:硬件攻城獅】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
怎么利用單片機控制電風扇?
基于單片機的智能風扇
基于單片機的智能電風扇設計

手機APP開發之MIT Appinventor詳細實戰教程(一),利用通過藍牙控制單片機,以及實現單片機與android設備之間的
51單片機與HC-05藍牙模塊(手機藍牙控制小燈之小白速成)
《電子DIY》之《單片機實踐項目》之基于單片機+藍牙HC-05模塊的簡易電子琴設計與制作(七十五)(Proteus仿真與實物制作)
基于51單片機的藍牙模塊控制模擬舵機





 工商網監
工商網監
評論