 51單片機的Timer,運用PWM完成呼吸燈
51單片機的Timer,運用PWM完成呼吸燈
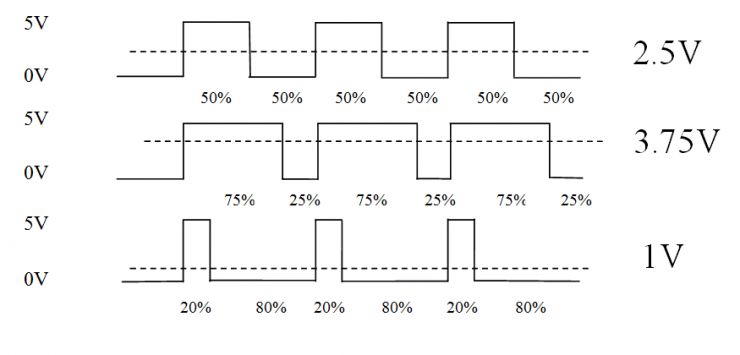
Pulse Width Modulation脈沖寬度調制,簡稱PWM。
PWM(脈沖寬度調制)對模擬信號電平進行數字編碼的方法,計算機只能輸出0或5V的數字電壓值而不能輸出模擬電壓,而我們如果想獲得一個模擬電壓值,則需通過使用高分辨率計數器,改變方波的占空比來對一個模擬信號的電平進行編碼。
仍輸出數字信號,因為滿幅值的直流供電只有5V(1)和0V(0)兩種。電壓是以一種連接(1)或斷開(0)的重復脈沖序列被夾到模擬負載上去的,連接即是直流供電輸出,斷開即是直流供電斷開。通過對連接和斷開時間的控制,只要帶寬足夠,可以輸出任意不大于最大電壓值的模擬電壓。
輸出電壓=(接通時間/脈沖時間)*最大電壓值
12
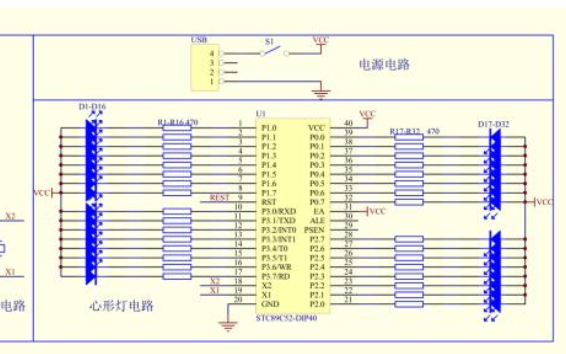
作者用的單片機是STC89C52,其內部有3個16位Timer,分別為T/C0,T/C1,T/C2,通過配置相關寄存器即可實現Timer的功能控制。
控制PWM需要用到定時器來生成不同占空比的波形,采用定時器中斷的方式。
相關寄存器:
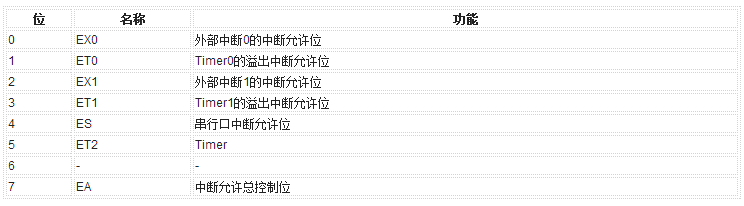
1.IE寄存器
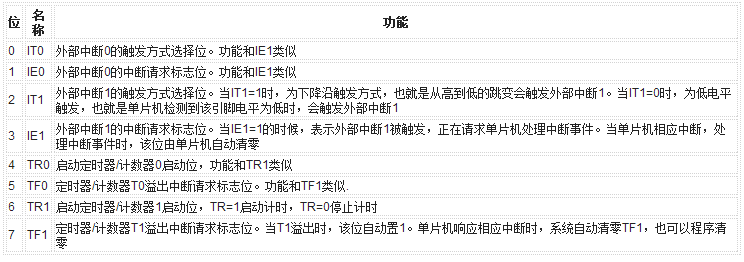
2. TCON寄存器
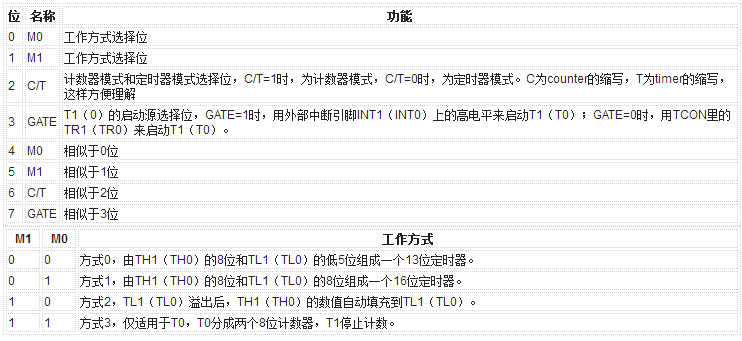
3. TMOD寄存器
控制Timer0/1的工作方式
TL14. Timer0/1計數寄存器
TL0
TH0
TH1
當定時開啟后,TL0(TL1)自動跟隨機器周期加一。當TL0(TL1)滿了后,自動清零同時向TH0(TH1)進一位,不需要手動操作.
而當TL0(TL1)和TH0(TH1)都滿了以后,此時如果定時中斷和總中斷都已經打開,那么就會發生溢出中斷,同時這兩個寄存器清零
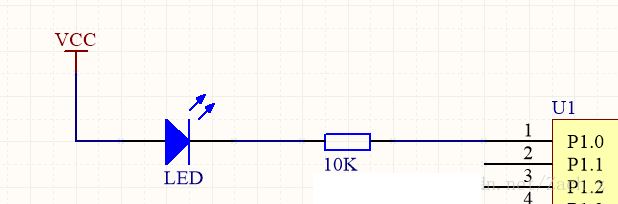
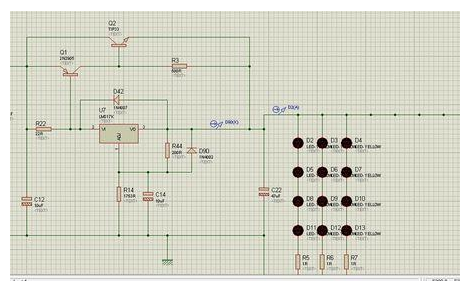
三、運用PWM完成呼吸燈
1. 硬件電路
2. 軟件驅動
unsigned char PWM_COUNT; //計數
unsigned int HUXI_COUNT; //占空比更新時間
unsigned char PWM_VLAUE; //占空比比對值
bit direc_flag; //占空比更新方向
void timer0_init()
{
TMOD=0x02; //模式設置,00010000,定時器0,工作于模式2(M1=1,M0=0)
TH0=0x47; //定時器溢出值設置,每隔200us發起一次中斷。
TL0=0X47;
TR0=1; //定時器0開始計時
ET0=1; //開定時器0中斷
EA=1; //開總中斷
PWM_COUNT =0;
}
void time0() interrupt 1
{
PWM_COUNT++;
HUXI_COUNT++;
if(PWM_COUNT == PWM_VLAUE) //判斷是否到了點亮LED的時候
LED = 1; //點亮LED
if(PWM_COUNT == 10) //當前周期結束
{
LED = 0; //熄滅LED
PWM_COUNT = 0; //重新計時
}
if((HUXI_COUNT == 600) && (direc_flag == 0))
{ //占空比增加10%
HUXI_COUNT = 0;
PWM_VLAUE++;
if(PWM_VLAUE == 9) //占空比更改方向
direc_flag = 1;
}
if((HUXI_COUNT == 600) && (direc_flag == 1))
{ //占空比減少10%
HUXI_COUNT = 0;
PWM_VLAUE--;
if(PWM_VLAUE == 1) //占空比更改方向
direc_flag = 0;
}
}
void main()
{
HUXI_COUNT = 0;
PWM_COUNT = 0;
PWM_VLAUE = 5;
direc_flag = 0;
LED = 1; //默認LED熄滅
timer0_init(); //定時器0初始化
while(1);
}
-
PWM
+關注
關注
114文章
5148瀏覽量
213428 -
51單片機
+關注
關注
273文章
5698瀏覽量
123215
原文標題:51單片機PWM的控制(呼吸燈)
文章出處:【微信號:eet-china,微信公眾號:電子工程專輯】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
51單片機基于定時器的精準呼吸燈

STC89C52_51單片機_例程3_PWM_呼吸燈





 工商網監
工商網監
評論