 CAN總線過載幀及數據幀詳解
CAN總線過載幀及數據幀詳解
CAN:Controller Area Network,控制器局域網是一種能有效支持分布式控制和實時控制的串行通訊網絡。本文首先介紹了CAN總線系統結構及數據傳輸,其次詳細的闡述了CAN總線過載幀及數據幀,具體的跟隨小編一起來了解一下吧。
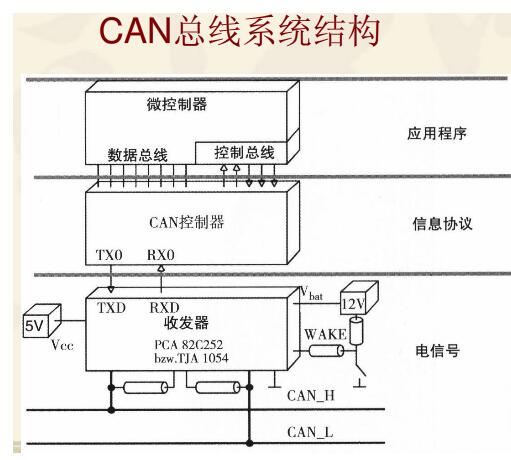
CAN總線系統結構
1、CAN 控制器
接收控制單元中微處理器發出的數據,處理數據并傳給CAN收發器
2、CAN收發器
將數據傳到總線 or 從總線接收數據給控制器
3、CAN數據傳遞終端
避免數據傳輸終了反射回來
4、CAN數據總線
傳輸數據的數據線,兩根 CAN-high and CAN-low,差分信號
CAN總線系統的數據傳輸
CAN總線節點上的節點發送數據是以報文的形式廣播給網絡中所有節點。收發器接收到數據就把數據傳送給控制器,再由控制器檢查判斷是不是所需數據。不是則忽略。
1、網絡上任何一個節點在任何時候都可以發送數據
2、多個節點發送數據,優先級低主動退出發送
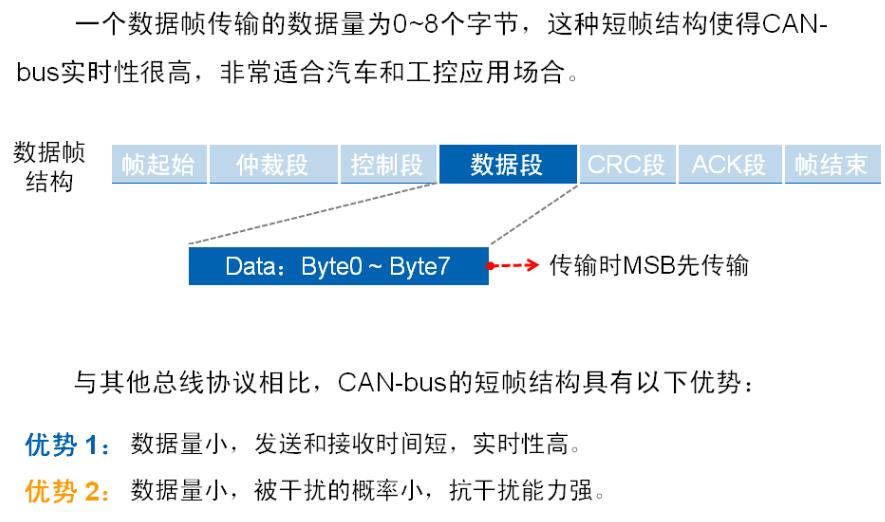
3、短幀結構,每幀數據信息為0~8字節(具體用戶定義),對數據編碼而不是地址編碼
4、CAN每幀都有CRC校驗和其他檢驗措施,嚴重錯誤的情況下具有自動關閉輸出的功能
CAN總線系統數據格式
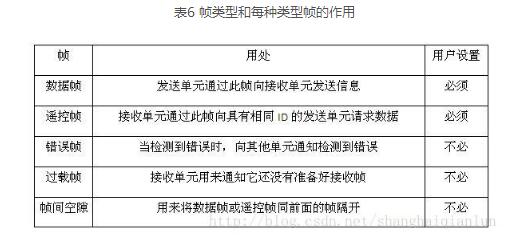
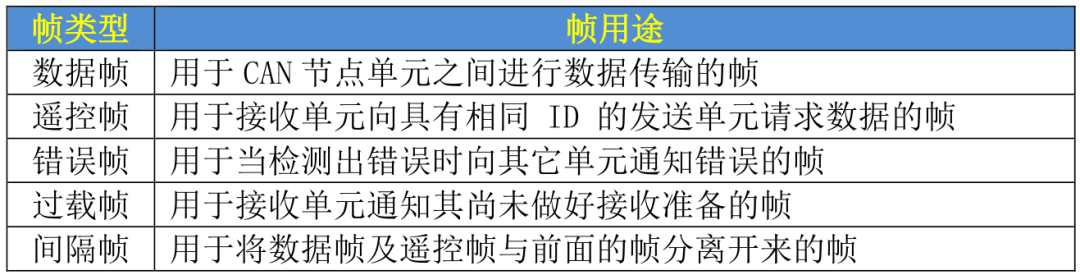
CAN-bus通信幀共分為數據幀、遠程幀、錯誤幀、過載幀和幀間隔五種類型,我們詳細的來介紹CAN總線過載幀及數據幀。
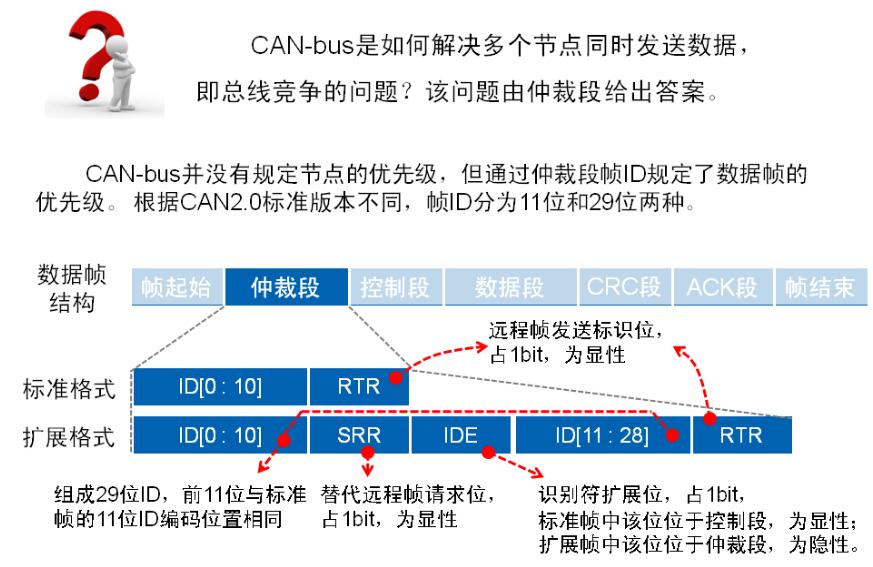
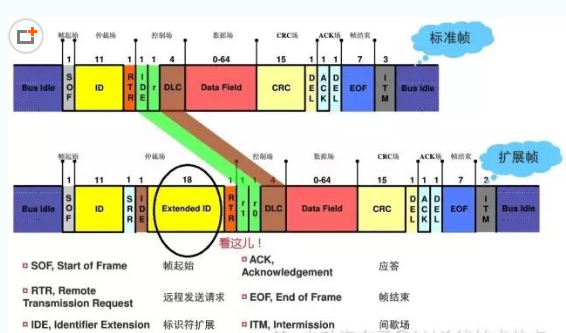
一、數據幀
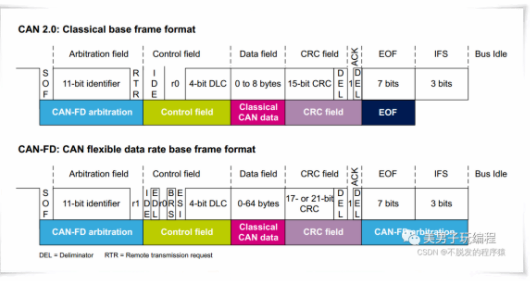
結構上由7個段組成,其中根據仲裁段ID碼長度的不同,分為標準幀(CAN2.0A)和擴展幀(CAN2.0B)。
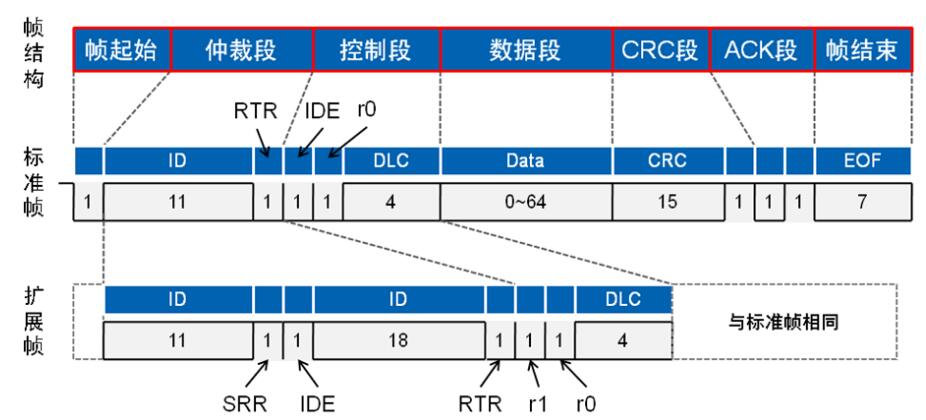
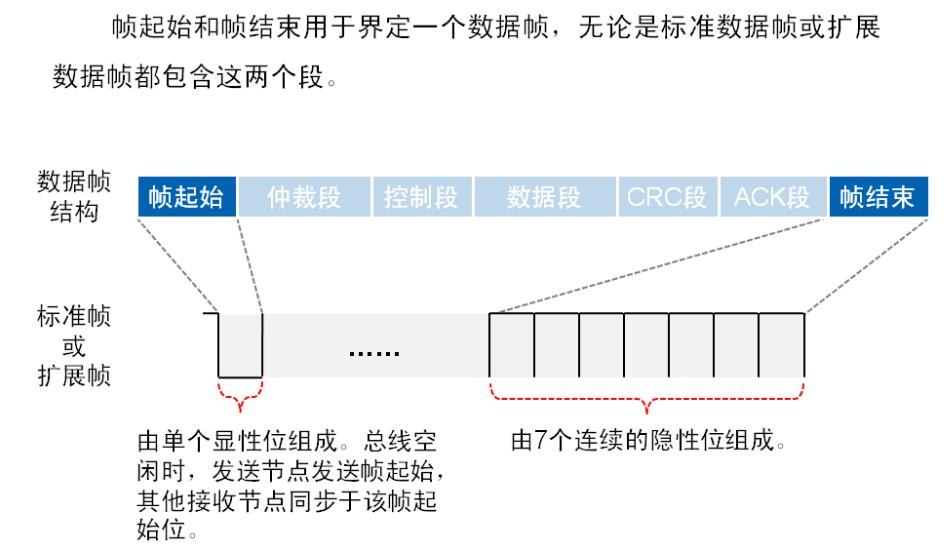
幀起始、幀結束
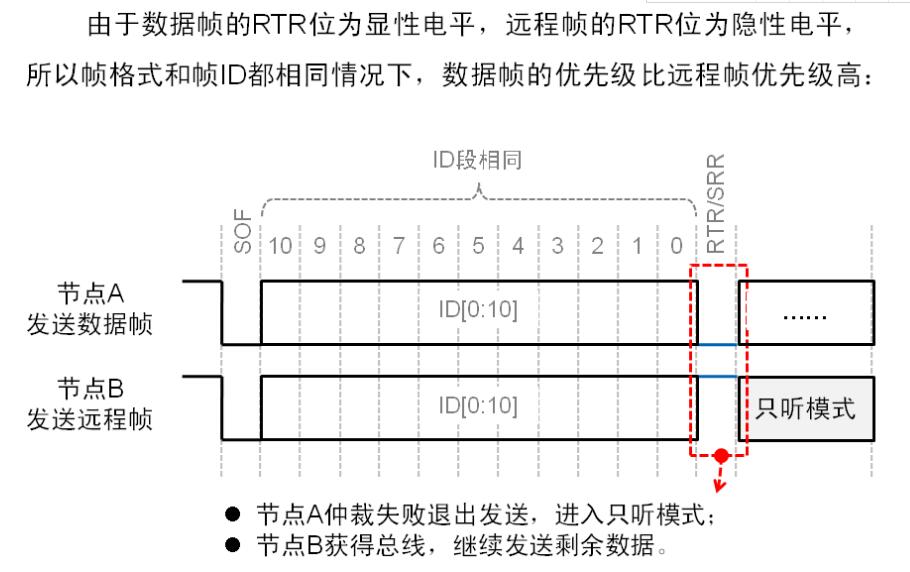
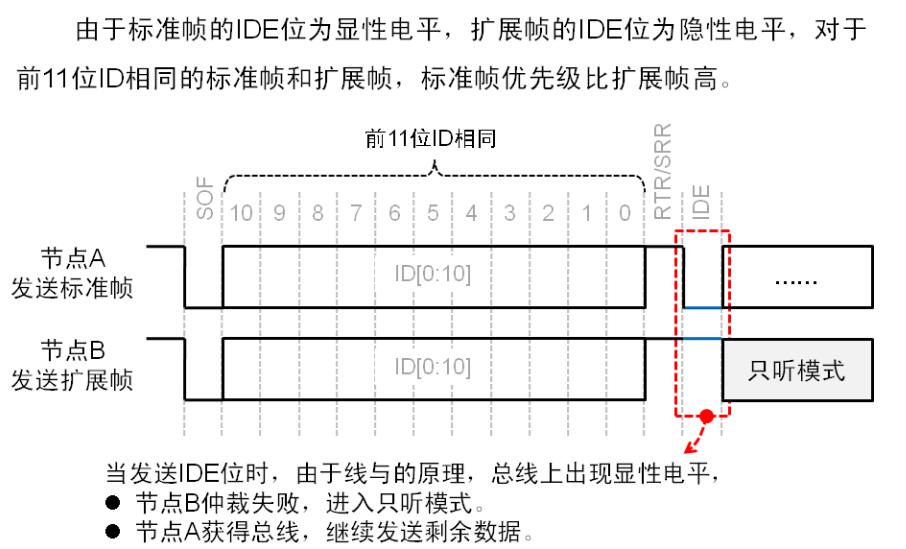
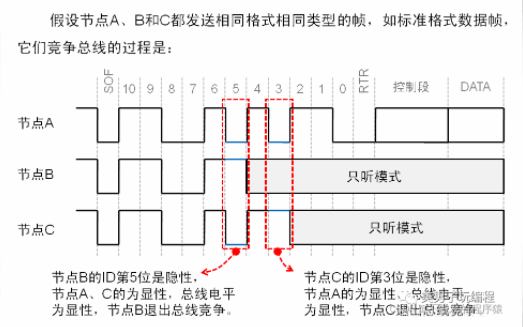
仲裁段
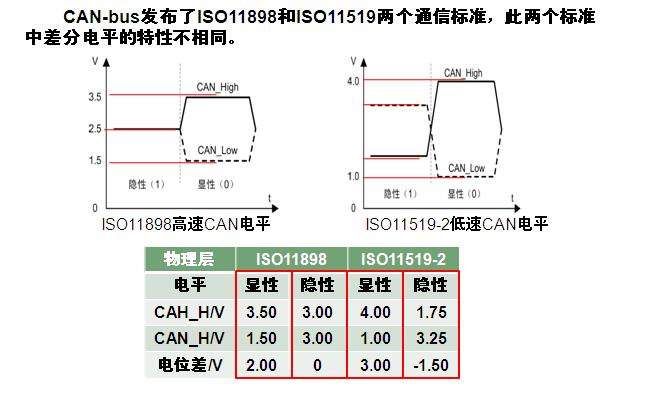
顯性隱性
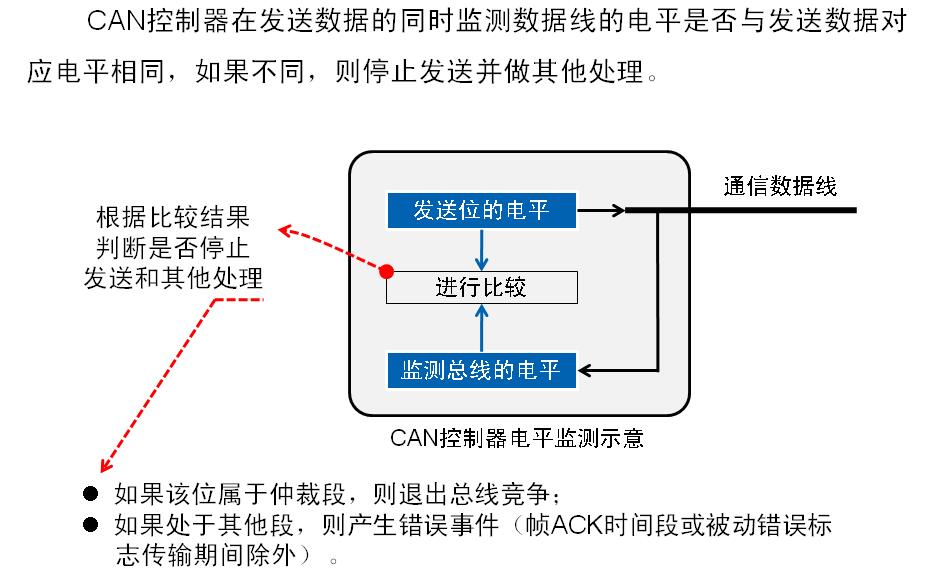
總線仲裁
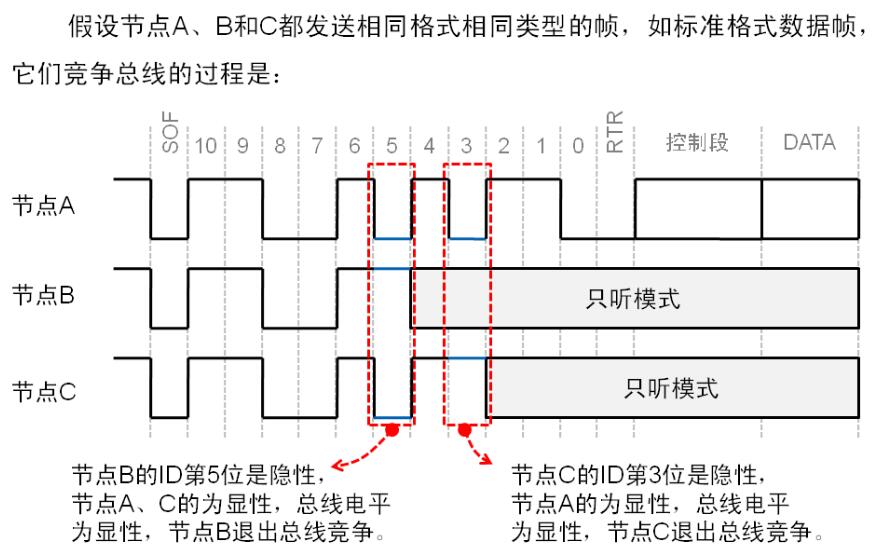
從該分析過程得出結論是:幀ID值越小,優先級越高
對于同為擴展格式數據幀、標準格式遠程幀和擴展格式遠程幀的情況同理。
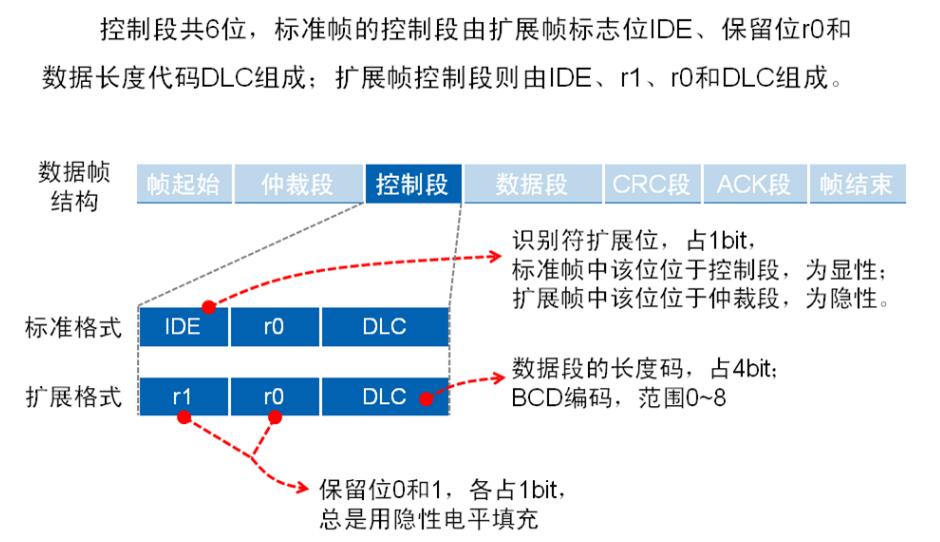
控制段
數據段
CRC段

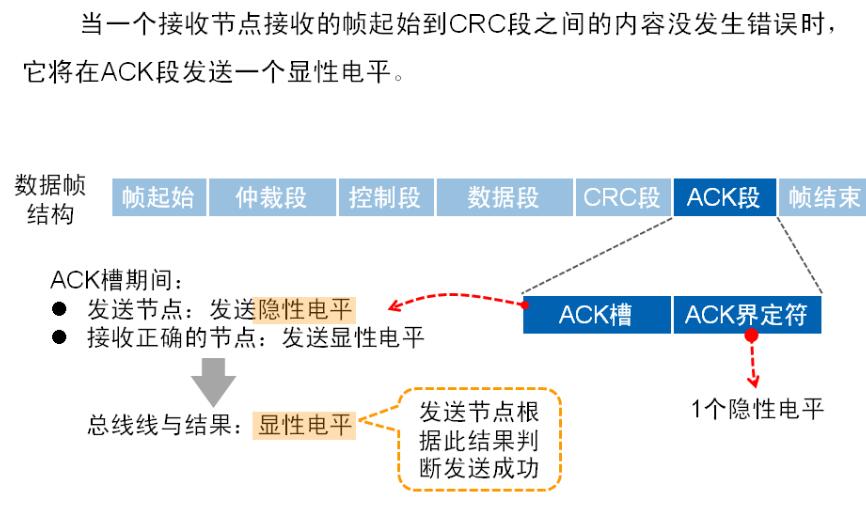
ACK段
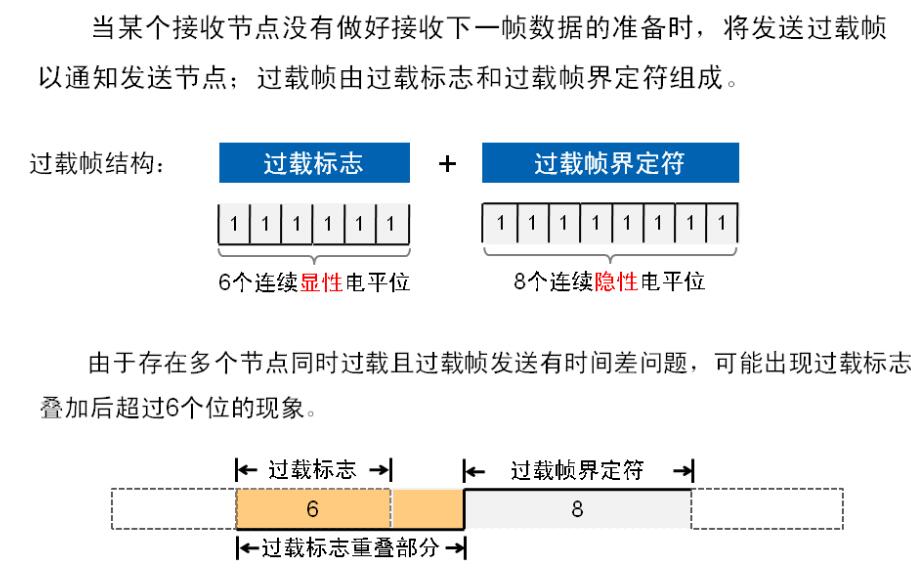
二、過載幀
-
CAN總線
+關注
關注
145文章
1898瀏覽量
130333
發布評論請先 登錄
相關推薦
一文解析CAN總線遠程幀和錯誤幀





 工商網監
工商網監
評論