 機器人離線編程與機器人編程趨勢
機器人離線編程與機器人編程趨勢
工業機器人的應用極大地提高了工廠的生產效率,在幫助企業應對人工成本上漲、勞動力供給不足等方面提供了可供選擇的方式,贏得了企業的廣泛關注。目前,機器人廣泛應用于焊接、裝配、搬運、噴漆、打磨等領域。
目前常用的編程方式有兩種:一種是示教編程,一種是離線編程。離線編程因為相對于示教編程具有許多優勢,應用范圍日趨廣泛。
協作機器人示教編程
需要實際機器人系統和工作環境
編程時機器人停止工作
在實際系統上試驗程序
編程的質量取決于編程者的經驗
難以實現復雜的機器人運行軌跡
機器人離線編程
離線編程特點:
需要機器人系統和工作環境的圖形模型
編程時不影響機器人工作
通過仿真試驗程序
可用CAD方法進行最佳軌跡規劃
可實現復雜運行軌跡的編程
1.離線編程優點
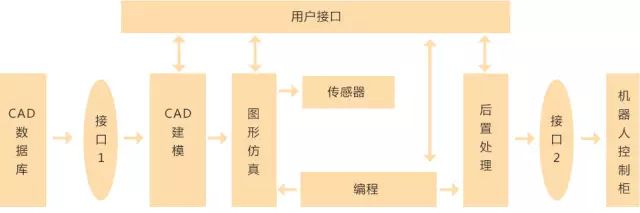
2.離線編程系統構成
一般說來,機器人離線編程系統包括以下一些主要模塊:傳感器、機器人系統CAD建模、離線編程、圖形仿真、人機界面以及后置處理等。如圖所示:
3.離線編程關鍵技術
機器人離線編程系統正朝著集成的方向前進,其中包含了多個領域中的多個學科,為推動這項技術的進一步發展,以下幾個方面的技術是關鍵:
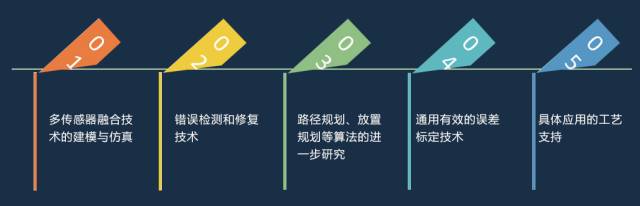
多傳感器融合技術的建模與仿真。隨著機器人智能化的提高,傳感器技術在機器人系統中的應用越來越重要。因而需要在離線編程系統中對多傳感器進行建模,實現多傳感器的通訊,執行基于多傳感器的操作。
錯誤檢測和修復技術。系統執行過程中發生錯誤是難免的,應對系統的運行狀態進行檢測以監視錯誤的發生,并采用相應的修復技術。
各種規劃算法的進一步研究,其包括路徑規劃、放置規劃和微動規劃等。規劃一方面要考慮到環境的復雜性、連續性和不確定性,另一方面又要充分注意計算的復雜性。
通用有效的誤差標定技術,以應用于各種實際應用場合的機器人的標定。
具體應用的工藝支持。如弧焊,作為離線編程應用比較困難的領域,不止是姿態、軌跡的問題,而且需要更多的工藝方面的研究以及相應的專家系統。
4.離線編程誤差
第一種是外部誤差,包括機器人和工裝的安裝誤差,工裝的加工誤差等。
第二種是內部誤差,即機器人本體在加工制造時產生的誤差。
減小誤差方式:
安裝誤差校準
Motocalv進行安裝誤差校準的原理是在仿真軟件中工件的三個特征位置生成一個三點程序,然后在現場工件上同樣三個位置生成一個三點程序,程序點順序和軟件中相同。通過這兩個程序、機器人系統參數和工具尖端點數據,可計算得到現場和軟件中工件與機器人相對位置差值。用這個差值去補償離線程序,縮小偏差。
這種方法需要到現場示教校準程序,遁入電腦,計算誤差,補償離線程序之后再遁入機器人,操作步驟較多,比較麻煩
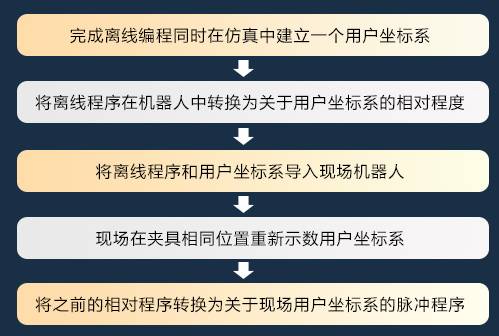
用戶坐標系校準法
5.離線編程軟件應用領域
6.離線編程主流廠商
7.機器人編程趨勢
隨著視覺技術、傳感技術,智能控制,網絡和信息技術以及大數據等技術的發展,未來的機器人編程技術將會發生根本的變革,主要表現在以下幾個方面:
①編程將會變得簡單、快速、可視、模擬和仿真立等可見。
②基于視覺、傳感,信息和大數據技術,感知、辨識、重構環境和工件等的CAD模型,自動獲取加工路徑的幾何信息。
③基于互聯網技術實現編程的網絡化、遠程化、可視化。
④基于增強現實技術實現離線編程和真實場景的互動。
⑤根據離線編程技術和現場獲取的幾何信息自主規劃加工路徑、焊接參數并進行仿真確認。
總之,在不遠的將來,傳統的在線示教編程將只在很少的場合得到應用,比如空間探索、水下、核電等,而離線編程技術將會得到進一步發展,并與CAD/CAM、視覺技術、傳感技術,互聯網、大數據、增強現實等技術深度融合,自動感知、辨識和重構工件和加工路徑等,實現路徑的自主規劃,自動糾偏和自適應環境。
-
機器人
+關注
關注
210文章
28191瀏覽量
206505 -
編程
+關注
關注
88文章
3591瀏覽量
93592
原文標題:機器人示教編程和離線編程技術解讀,這次全了!
文章出處:【微信號:GKYXT1508,微信公眾號:工控云學堂】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
機器人視覺——機器人的“眼睛”
多軸機器人的發展趨勢
工業機器人仿真與編程
機器人是什么?
國內首款機器人離線編程軟件RobotArt







 工商網監
工商網監
評論