") 三個方面講智能車輛對對ADAS的需求
三個方面講智能車輛對對ADAS的需求
本文首先從車企競爭、安全政策、成本降低三個方面講了智能車輛對對ADAS的需求,ADAS的特殊開發(fā)環(huán)境,以及ADAS的控制策略開發(fā),包括車輛建模、ADAS系統(tǒng)結構及參數(shù)、ADAS 控制算法開發(fā)、ADAS HIL測試系統(tǒng)。
智能車輛是一個集環(huán)境測量和感知、車輛定位和姿態(tài)判斷、局部路徑和算法、聯(lián)網(wǎng)和數(shù)據(jù)交互、規(guī)劃決策與多等級輔助駕駛等功能于一體的綜合車輛控制系統(tǒng),它集中運用了車輛技術、計算機、現(xiàn)代傳感、信息融合、通訊、人工智能及自動控制等技術。智能車輛己經(jīng)成為世界車輛工程領域研究的熱點和汽車工業(yè)增長的新動力,美國、日本和歐洲都將其納入到各自重點發(fā)展的智能交通系統(tǒng)中。
第一部分 影響智能車輛發(fā)展的因素
ADAS
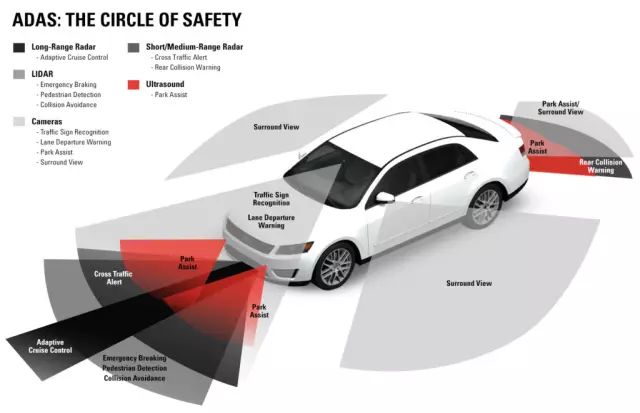
a)車企的競爭需求:汽車上的功能特色,從早期電動車窗到當今最新的高級輔助駕駛系統(tǒng)(ADAS)系統(tǒng),豪華汽車所具有的高端特性和功能隨著時間的推移最終都應用到中端和經(jīng)濟型汽車上。歐洲的福特福克斯汽車現(xiàn)在具備了自適應巡航控制(ACC)、自動剎車和主動式車道保持等功能,起亞汽車也安裝了后視攝像機。
b)安全政策的需求:隨著政府對于道路安全的管理需求,政府的道路安全規(guī)章制度和評分系統(tǒng)的變革也是一個重要因素。歐洲汽車評估機構“Euro NCAP”將從2016年開始將行人檢測系統(tǒng)和減輕行人傷害的制動器列為評估對象。屆時將對行人檢測、自動制動等一系列動作進行測試。美國國家高速運輸安全管理局正在制定強制安裝后視攝像機的政策,推進車車間通信的框架。
c)成本的降低和優(yōu)惠措施:安裝了ADAS的車輛在保險上有折扣也是推動ADAS廣泛應用的另一因素。 ADAS在汽車上廣泛應用的決定性因素還是成本,其技術的復雜性,隨著傳感器和處理器技術的進步(很少器件中集成多種功能),使得現(xiàn)在經(jīng)濟型汽車也能承受某些ADAS功能的應用。
智能汽車的開發(fā)環(huán)境
汽車的開發(fā)環(huán)境,主要有基于場景的模型和對于智能汽車控制實驗兩部分組成,前者主要是通過各種場景的抽象,形成程序環(huán)境;后者主要進行研究、標定和認證的實驗,包括實驗場地、實驗設備,測速環(huán)境等。
ADAS系統(tǒng)的功能與應用特性不同于常規(guī)汽車電子控制系統(tǒng),ADAS具有自身的特點:
1)ADAS的應用場景一般為人、車、路構成的閉環(huán)系統(tǒng),三者缺一不可
2)ADAS與自身車輛性能以及道路的特性、駕駛員的安全行為直接相關
3)ADAS系統(tǒng)通常需與多個車載控制系統(tǒng)協(xié)作,是一種分布式控制系統(tǒng)
車輛縱向控制需求
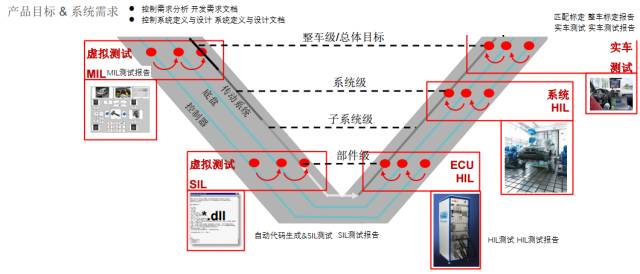
ADAS系統(tǒng)的開發(fā)具有特殊性,要遵從一般ECU的V模式開發(fā)流程(工具和基于模型的設計方法首先對電池管理控制系統(tǒng)進行了設計、仿真和驗證,然后為其生成了產(chǎn)品代碼),由于ADAS系統(tǒng)的實時性非常重要,需要實時與不同類型的傳感器進行數(shù)據(jù)交換(比如攝像頭、激光雷達、雷達、車輛CAN總線、GPS等),而且需要方便的集成新的功能和算法。ADAS系統(tǒng)的軟件開發(fā)需要解決很多挑戰(zhàn),比如多線程編程、數(shù)據(jù)樣本時戳和再同步、數(shù)據(jù)延時測量和預估,系統(tǒng)優(yōu)化和性能評估、代碼重用和軟件應用維護等,一般一開始就需要考慮虛擬化半實物仿真測試方案。
ADAS細分成不同的功能,但是目前其測試環(huán)境和解決方案貫穿于前期的MBD建模和算法開發(fā),到發(fā)布ECU代碼,ECU樣件測試完畢,連接到子系統(tǒng)和傳感器,裝到樣車上,以及形成整車,共用一個測試平臺。從MIL,SIL到EIL,HIL,VIL各個階段都用一個測試平臺,通過軟件將虛擬化場景復現(xiàn)出來,測試ADAS的各種功能。包含車輛模型,交通環(huán)境模式,駕駛員模型,傳感器模型,環(huán)境模型。根據(jù)不同測試對象,選擇的不同傳感器,獲取環(huán)境中不同的信息。把傳感器獲得的信息給到算法或者ECU,算法或ECU再反過來控制環(huán)境中的整車,形成閉環(huán)的測試環(huán)境。如果在早期算法開始就進行測試,到后期隨著開發(fā)的深入,測試項會發(fā)生變化,如果從早期就投入使用測試方案,后期會越來越簡單。
MBD的開發(fā)過程(編者自行整理)
第二部分 控制策略開發(fā)過程
ADAS的控制策略開發(fā)
全系統(tǒng)仿真建模:車輛系統(tǒng)動力學主要研究車輛行駛過程中受到的各種力的相互作用、由此產(chǎn)生的對車輛運動的影響以及車輛內(nèi)部各系統(tǒng)之間的相互影響。
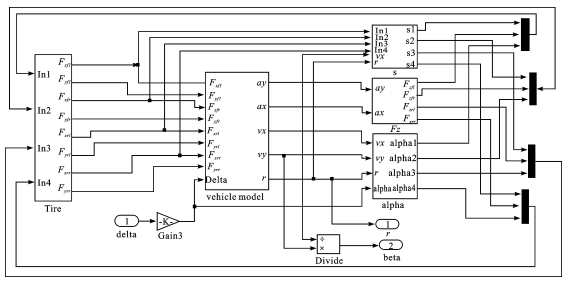
車輛建模
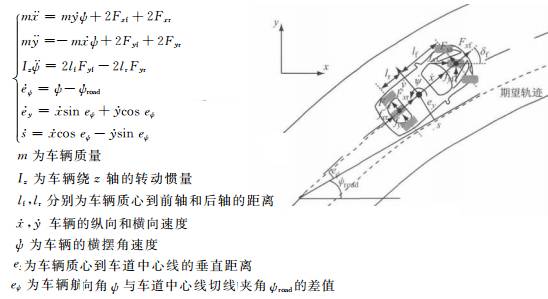
包含輪胎模型和車輛模型。前者是基于試驗數(shù)據(jù)的半經(jīng)驗輪胎模型,它對輪胎的縱向力、橫向力和回正力矩的擬合性較好;后者往往需要做一些假設,如車輛坐標系原點與汽車質(zhì)心重合;汽車僅作沿 x軸的縱向運動、沿y軸的橫向運動和繞 z軸的橫擺運動;各輪胎機械特性相同。
傳統(tǒng)的基于車輛簡化模型(編者自行整理)
現(xiàn)在越來越多的開始在軟件(Cruise仿真軟件, AMESim仿真軟件)中構建該車型的仿真模型,包括車輛內(nèi)外造型,動力學參數(shù)等。AMESim可以對車輛模型結合有傳統(tǒng)制動系統(tǒng)、ABS和ESP系統(tǒng)的液壓、氣動元部件以及控制方案進行建模與仿真分析,得到更為細致的結果。
車輛模型在軟件中進一步細化(AMESim 建模參考)
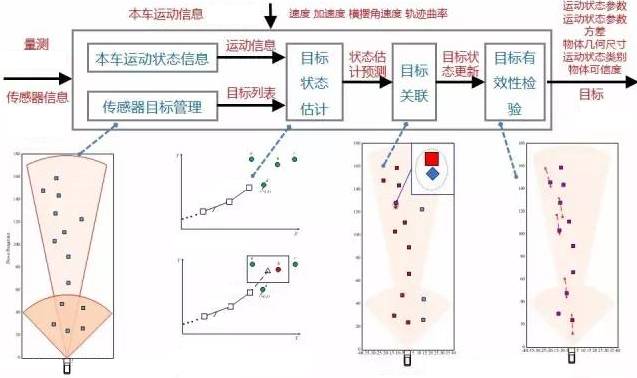
ADAS系統(tǒng)結構及參數(shù):使用一套傳感器裝置,選用 1 個單目攝像頭和雷達的參數(shù)選型。根據(jù)這些傳感器開發(fā)多目標跟蹤算法,目的是計算出有效目標的距離、速度及角度,需要進一步細化運動狀態(tài)的參數(shù)及方差、幾何尺寸、運動狀態(tài)類別、物體特征類別概率等,且還包括傳感器的信息及交通環(huán)境的信息。結合傳感器量測信息,基于本車的運動信息和傳感器的目標管理,從而進行雷達目標狀態(tài)的估計,然后對于每個目標進行數(shù)據(jù)關聯(lián),從而關聯(lián)成一個有效的物體,然后再對物體的有效性進行校驗,得到目標的運動狀態(tài)及運動狀態(tài)參數(shù)偏差、幾何尺寸、物體可信度等。對物體的運動狀態(tài)進行分類(物體是運動的、靜止的、開始運動再開始靜止)。
ADAS 控制算法開發(fā):以自適應巡航為例,包括定速續(xù)航控制、彎道巡航控制和跟隨控制。前者控制單元按照駕駛員設定的巡航速度控制車輛勻速行駛;后者則使主車車速降到理想目標值后,保持相對距離地跟隨前方目標車輛行駛。三個控制系統(tǒng)同時計算,然后基于車輛的行駛工況,理想控制輸出進行選擇。在實際中需要考慮汽車本身動力學及運動學特性的,是否上下坡工況,在不同速度段的驅(qū)動能力等等,對理想控制輸出進行限制。
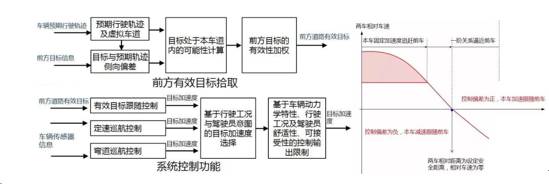
ACC前面目標和系統(tǒng)功能簡圖(圖片來源:微講座《77GHZ毫米波了大的開發(fā)難度》)
具體實現(xiàn)是分模塊實現(xiàn)之后在Simulink里面細化,在定速模塊內(nèi)做PID控制策略;
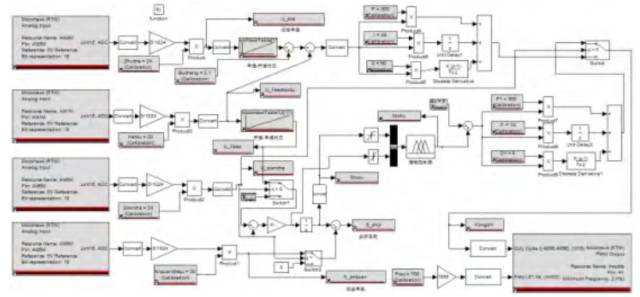
ACC 算法 Simulink實現(xiàn)(編者自行整理)
ADAS HIL測試系統(tǒng):不少汽車OEM公司,都采取完整的“虛擬車輛”測試平臺并以此完成了ADAS仿真測試。通過待測試車型仿真模型的實時運行,可實現(xiàn)對車輛各種運行狀態(tài)和各類復雜工況的模擬,并完成對整車電子電氣系統(tǒng)的手動測試和自動化測試。
-
汽車工業(yè)
+關注
關注
2文章
113瀏覽量
29870 -
adas
+關注
關注
309文章
2168瀏覽量
208524 -
智能車輛
+關注
關注
0文章
17瀏覽量
19240
原文標題:ADAS系統(tǒng)控制策略的開發(fā)與測試
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關推薦
智能車模型(E題)
汽車一直在科技——智能車輛警示牌、AI、機器人...
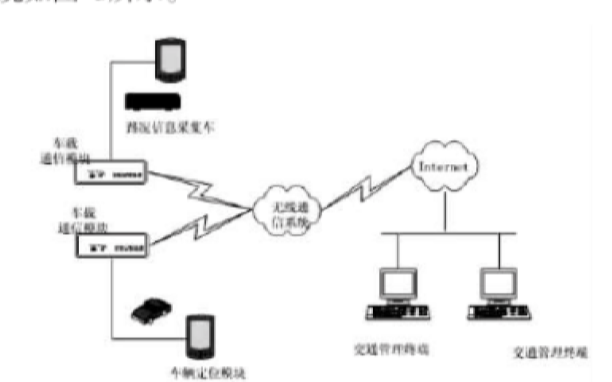
超高頻RFID智能車輛管理系統(tǒng)的工作原理是什么?
怎么實現(xiàn)移動智能車輛稽查系統(tǒng)的設計?
怎么實現(xiàn)基于C8051F121在智能車輛檢測器中的設計?
智能車制作相關資料分享
世界智能車輛行駛安全保障技術的研究進展
基于RFID的智能車輛管理系統(tǒng)
ADAS納入安全法規(guī),智能車相關應用技術已臻成熟

從新增、退出、需求三個方面來拆解PCB行業(yè)未來的供需格局

實施智能制造需要考慮三個支點
世界智能車輛的關鍵共性技術研究現(xiàn)狀
智能車制作






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論