 實現強監督和弱監督學習網絡的協同增強學習
實現強監督和弱監督學習網絡的協同增強學習
訓練一個高準確率的檢測模型需要大量精細標注的圖片數據,其成本很高。本文提出了一種弱監督協同學習框架,僅使用粗略標簽的圖片訓練目標檢測模型,測試結果顯示其定位精確率和檢測準確率均顯著優于目前最先進的方法。
目標檢測是機器視覺的基本問題,在視頻監控、無人駕駛等場景都有廣泛應用。隨著深度學習的興起,近年來涌現了大量優秀的目標檢測模型。然而,訓練一個高準確率的檢測模型需要大量的以包圍框形式精細標注的圖片數據作為模型監督條件,需要花費大量的人力物力。
同時,我們可以從互聯網輕松獲取海量粗標注的圖片,如利用Flickr的標簽。因此,研究如何在弱監督條件下,即僅提供粗略圖片類別標注,訓練目標檢測模型,具有重要的意義。已有學者探索了基于多示例學習構建弱監督條件下的目標檢測模型學習方法,但是模型的精確度仍然難以令人滿意。
論文:Collaborative Learning for Weakly Supervised Object Detection
論文鏈接:https://arxiv.org/abs/1802.03531
本論文提出了一種弱監督協同學習(WSCL)的框架,將弱監督學習網絡和強監督學習網絡連接成為一個整體網絡,通過一致性損失約束強監督和弱監督學習網絡具有相似的預測結果,通過強監督和弱監督學習網絡間部分特征共享保證兩個網絡在感知水平上的一致性,從而實現強監督和弱監督學習網絡的協同增強學習。弱監督協同學習框架結構如下圖所示:
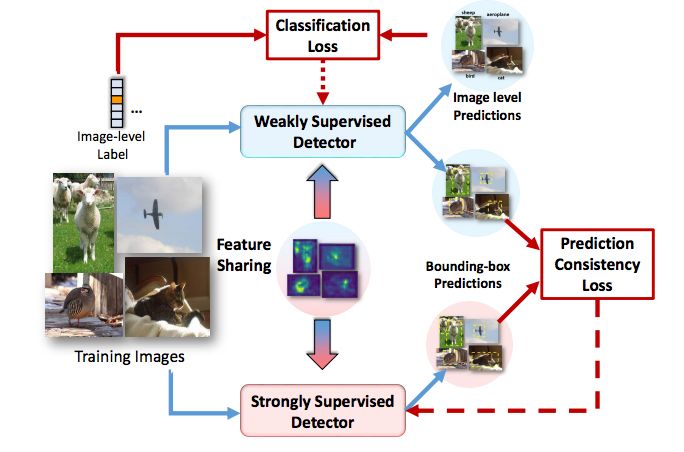
弱監督協同學習框架(以目標檢測為例)
基于上述弱監督協同學習框架,論文設計了一個端到端的弱監督協同檢測網絡(WSCDN),弱監督和強監督的檢測模塊分別采用了目前最優秀WSDDN和RCNN網絡結構。其網絡結構如下圖所示。
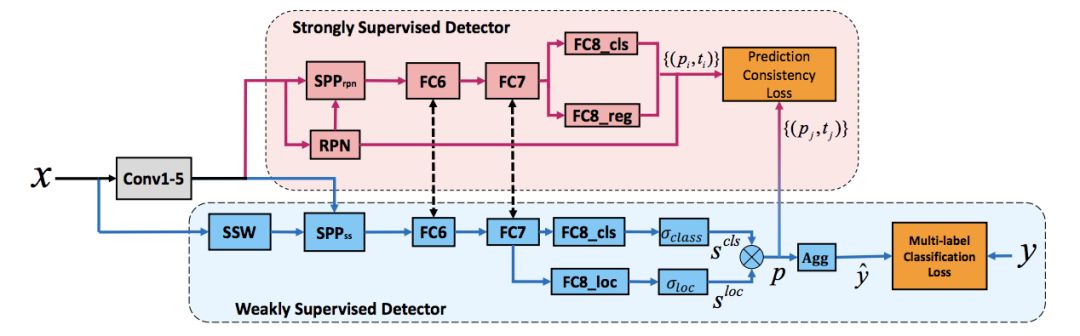
弱監督協同目標檢測學習模型
在每次學習迭代中,整個目標檢測網絡只將圖像級標簽作為弱監督,并且通過預測一致性損失并行優化強監督和弱監督檢測網絡。
下圖是WSCDN訓練時,強監督和弱監督檢測網絡準確率的變化曲線。
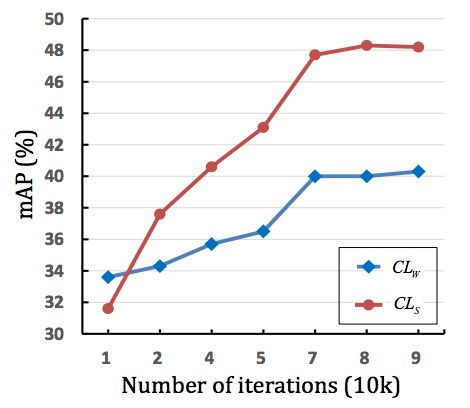
可以看出,在訓練的初始階段,弱監督檢測網絡準確率高于強監督檢測網絡。隨著協同訓練輪次的增多,兩者的準確率均逐漸上升,但強監督檢測網絡提升的速度更快,并很快超越弱監督檢測網絡。在整個訓練過程中,兩類檢測網絡相互協同,達到了共同提高的效果。
我們比較了弱監督協同檢測網絡與其他相關弱監督檢測方法在PASCAL VOC 2007測試圖片上的效果(見下圖)。其中,IW是單獨訓練得到的弱監督檢測模型,CSS是分開迭代訓練得到的強監督檢測模型,CLW和CLS分別是通過弱監督協同檢測網絡得到的強監督和弱監督檢測網絡。可以看出,我們的強監督檢測網絡明顯優于其他檢測器網絡,表現在可以得到更全面和更緊湊的包圍框預測。
我們用PASCAL VOC 2007和PASCAL VOC 2012數據集進行了測試。結果表明,弱監督協同檢測網絡的定位精確率以及檢測準確率均顯著優于目前最先進的方法。
弱監督協同檢測網絡與其他目前最先進的方法在PASCAL VOC 2007 測試數據集上檢測精確度的比較(AP) (%)

弱監督協同檢測網絡與其他目前最先進的方法在PASCAL VOC 2007 trainval set 上定位精確度的比較(CorLoc) (%)

弱監督協同檢測網絡與其他目前最先進的方法在PASCAL VOC 2012 測試數據集上檢測精確度的比較(AP) (%)

弱監督協同檢測網絡與其他目前最先進的方法在PASCAL VOC 2012 trainval set 上定位精確度的比較(CorLoc) (%)

-
互聯網
+關注
關注
54文章
11105瀏覽量
103012 -
網絡
+關注
關注
14文章
7516瀏覽量
88627 -
無人駕駛
+關注
關注
98文章
4029瀏覽量
120297
原文標題:IJCAI Oral:弱監督實現精確目標檢測,上交大提出協同學習框架
文章出處:【微信號:AI_era,微信公眾號:新智元】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
適用于任意數據模態的自監督學習數據增強技術

深非監督學習-Hierarchical clustering 層次聚類python的實現
基于半監督學習框架的識別算法
你想要的機器學習課程筆記在這:主要討論監督學習和無監督學習
如何用Python進行無監督學習
機器學習算法中有監督和無監督學習的區別
最基礎的半監督學習
半監督學習最基礎的3個概念
為什么半監督學習是機器學習的未來?
半監督學習:比監督學習做的更好
深度學習:基于語境的文本分類弱監督學習

融合零樣本學習和小樣本學習的弱監督學習方法綜述






 工商網監
工商網監
評論