 關于基于LoRa的遠程抄表系統的設計與實現
關于基于LoRa的遠程抄表系統的設計與實現
0 引言
隨著工業自動化、城市居民住宅建設和農村小城鎮建設的日益發展,獨立電能表數量迅速增多,抄表計量也日趨復雜。傳統的人工電力抄表方式已不能滿足當今社會的需求,遠程抄表已成為智能電網中重要的組成部分。近年來,利用ZigBee技術構造的無線自動抄表系統的技術水平有了長足的進步[1],但是ZigBee只適用于近距離傳輸,最遠通信距離為100 m,且ZigBee網絡很容易產生同頻干擾,影響網絡質量;在實際應用中由于電能表安裝的物理范圍廣而且有些地區遮擋物較為嚴重等問題,不能將電能表數據全部抄回。為解決上述問題,本文提出了一種基于LoRa的新型遠程抄表系統,該抄表系統通信距離遠、功耗低[2],能很好地滿足無線智能抄表系統的需求。系統通過中繼器將無線信號進行中繼轉發[3-4],建立有效、快捷且可靠的路由路徑,最終將電能表數據抄讀回來。基于SX1278的LoRa是一種新型無線通信技術,它利用了先進的擴頻調制技術和編解碼方案,增加了鏈路預算,具有更好的抗干擾性[5-6]。
1 系統總體設計方案
基于LoRa的遠程抄表系統由路由模塊、中繼器、電能表組成。路由模塊對電能表集中管理,并且負責對電能表的數據抄讀;中繼器負責為電能表中繼無線信號;電能表為系統的從設備,也是中心設備,所有其他設備最終都是為了抄讀電能表的計量數據服務。系統運行時,由于電能表安裝的物理范圍廣,必然存在直抄近端區及中繼遠端區這兩種情況。對于直抄近端區,可以通過無線模塊直接抄讀;對于中繼遠端區,需要通過中繼器進行無線數據轉發,系統設計框圖如圖1所示。
基于LoRa的遠程抄表系統采用的網絡為主從式,由路由模塊集中管理中繼器、電能表。在這里把網絡構建分成兩部分:路徑探測請求流程和路徑探測響應流程。路徑探測請求流程由路由模塊發起,采用洪泛廣播的方式傳輸,中繼器在接收到路徑探測請求幀后,根據其內容進行選擇性中繼轉發,最終中繼至表端,這也就是請求抄表的過程,通過路徑探測請求流程來尋找抄表的路徑。路徑探測響應流程由末端中繼器發起,中繼器在接收到表端的路徑探測響應幀后,根據自身存儲的中繼路徑構建路徑探測響應幀回傳給路由模塊,采用單播的方式傳輸,一旦路由模塊接收到路徑探測響應幀,就可以確定該路徑能夠實現抄表。
2 SX1278
SX1278是LoRa射頻部分的核心芯片,它集成規模小、效率高,工作頻段為137~525 MHz[7]。LoRa是低功耗廣域網通信技術的一種,是一種基于擴頻技術的超遠距離無線傳輸技術。當SX1278工作在LoRa模式時,能獲得超過-148 dBm的高靈敏度[8]。SX1278部分關鍵性能數據如表1所示。

2.1 SX1278芯片及外圍電路
SX1278芯片及外圍電路圖如圖2所示。射頻收發芯片SX1278通過SPI接口以及RF_DIO1~RF_DIO3與MCU進行信號傳輸。
2.2 天線端口電路
該部分電路包含射頻信號的收發切換控制以及天線的兩種兼容接口(IPEX座接口和彈簧天線接口),L3、C14、C15組成π型匹配網絡,用于對天線的匹配,具體電路圖如圖3所示。
3 路徑探測流程
路徑探測是指路由模塊、中繼器、表端的網絡構建過程,網絡構建為后續的集中器抄表提供通信路徑。
3.1 路徑探測請求流程
路由模塊在發起對某個表端模塊的路徑探測后,先設定路徑探測超時定時器,然后等待子節點對路徑探測請求幀的中繼轉發以及路徑探測請求的響應處理[9];中繼器對路徑探測請求幀進行中繼轉發,各中繼器在中繼轉發時遵循時隙同步原則[10],在一個有效的時隙周期內只對同一網絡的同一目標地址的路徑探測請求幀轉發一次,對于在該時隙周期內接收到多條相同目標地址的路徑探測請求幀,中繼器可以保存3條記錄,以作路徑探測響應幀使用,流程框圖如圖4所示。
3.2 路徑探測響應流程
中繼器在接收到表端模塊發送的路徑探測響應幀后,根據路徑探測請求流程記錄的該目標節點的中繼路徑進行依次轉發,在此轉發過程中不啟用時隙同步流程,作單條命令固定時間間隔延時,路由模塊在接收到路徑探測響應幀后,選擇存儲中繼路徑,用以后續的抄表使用,流程框圖如圖5所示。
4 各路徑探測命令幀解析
在進行路徑探測的過程中需要發送一些探測命令幀,發送探測命令幀的過程就是尋找路徑的過程,通過探測命令幀的回復可以確定該路徑是否能實現抄表。在本文的設計中提出的探測命令幀有4種:發起路徑探測請求幀、中繼路徑探測請求幀、發起路徑探測響應幀、中繼路徑探測響應幀。
4.1 發起路徑探測請求幀
在發起路徑探測請求幀之前首先要確定路由探測請求幀的各項參數:網絡規模(S)、時隙號、允許中繼次數(DM)、當前中繼次數(DC),這些參數的確定在路徑探測過程中是較為重要的。確定新建網絡的規模就是確定中繼器的個數,假設系統所有表檔案數為300,其中10%的表端需要安裝中繼器來完成信號的中繼,則中繼個數為31,即S=31。將一個超幀中的時隙總數NS設置為網絡規模,即NS=S。中心節點的時隙號設置為0。允許的中繼次數是指路由模塊需要探測表端的n級中繼路徑,路由模塊在發送完路徑探測請求幀命令后,等待一個RT來判斷是否探測成功。

式中BS是標準時隙時間為,300 ms;ST是發送路徑探測命令消耗時間;IT是指當前中繼器記錄多條路徑時,發送每條路徑探測命令響應幀的間隔時間。對于當前中繼次數(DC),每中繼一次DC加1。
4.2 中繼路徑探測請求幀
中繼器在接收到中繼路徑探測命令后,根據探測命令的參數來判斷是否繼續轉發,中繼器可并行處理3個不同網絡、不同目標節點的路徑探測命令請求幀,每條命令處理流程獨立進行,互不影響。在處理前首先要檢查該目標節點的路徑探測請求幀是否已經轉發、當前的中繼次數是否大于允許中繼次數以及命令幀中的中繼列表是否已經包含自己。處理流程圖如圖6所示。
在圖6中涉及發送時隙的計算,發送時隙的計算會因不同節點發出的路徑探測命令而不同。
若接收到的為中心節點發出的路徑探測命令,則:
4.3 發起路徑探測響應幀
中繼器在接收到表端模塊的路徑探測請求幀的響應命令后,發起路徑探測響應命令,其流程圖如圖7所示。
在圖7中若查詢到記錄有路徑探測請求幀,則選擇記錄的最優路徑構建路徑探測響應幀,然后將選擇的路徑探測命令進行反向傳輸,填充下行報文,中繼最大級數為上行報文的中繼列表數,當前中繼索引等于中繼最大級數。
4.4 中繼路徑探測響應幀
中繼器在接收到路徑探測響應幀后,檢查路徑探測響應幀中的上行報文的中繼列表地址,判斷當前中繼索引對應的中繼地址是否為本中繼器地址,然后根據中繼列表計算下一級中繼地址,填充下行報文信息,轉發給下一級中繼器。
5 抄表流程設計
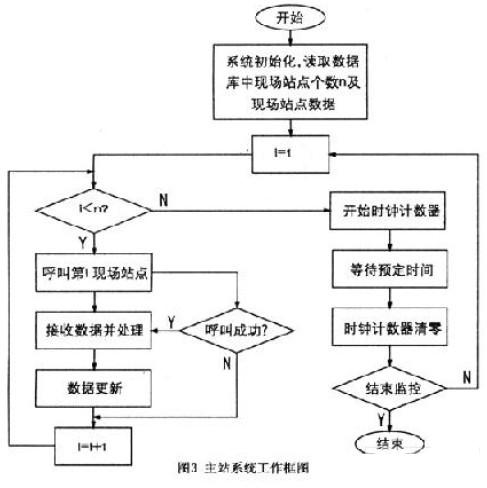
集中器下發對單個表端的抄表命令后,路由首先判斷目標節點是不是在檔案中存在,沒有則返回否認幀,依次用存放的路徑去抄讀,直到抄到數據或者路徑全部用完為止,流程圖如圖8所示。如果所有的路徑都用完后還沒有抄到數據,則不再探測新的路徑,直接返回否認幀。
6 數據分析
為了測試該路徑探測方法的有效性,對公司園區內500個電表進行了大量組網測試。表2是窄帶載波和LoRa兩種不同組網機制在同一組網環境下的組網時間和中繼深度。
表3是基于LoRa的路徑探測方法在園區內的組網結果,可以看出網絡的最大中繼深度為3級,點對點直抄回的電表數量為342個,一級中繼抄回的電表數量為83個,二級中繼抄回的電表數為52個,三級中繼抄回的電表數為23個,園區內的500個電表都能抄回。
從表2、表3可以得出,該遠程抄表系統能夠在較短的時間內完成組網,網絡的復雜度也低于窄帶載波,組網范圍廣,組網穩定,抄表率也高。
7 結束語
本文所設計的基于SX1278的新型遠程抄表系統性能穩定,功耗低,組網速度快,能以較小的中繼深度完成組網,網絡復雜度低,能有效解決電能表安裝物理范圍廣或地區遮擋物較為嚴重時數據不能抄讀的問題。該系統已成功應用于抄表行業中,這對于將LoRa技術廣泛應用于抄表行業打下了基礎,具有良好的實用價值。
-
ZigBee
+關注
關注
158文章
2269瀏覽量
242530 -
遠程抄表
+關注
關注
1文章
84瀏覽量
15008 -
LoRa
+關注
關注
349文章
1672瀏覽量
231788
發布評論請先 登錄
相關推薦
遠程抄表系統的優點是什么?
LORA/NBIOT低功耗無線抄表
LoRa網關實現水表抄表無線遠程數采方案

LoRa ZWS云應用(1)-智能抄表方案篇

遠程抄表集中器是什么?






 工商網監
工商網監
評論