 無人機傾斜影像三維建模中的問題
無人機傾斜影像三維建模中的問題
摘要:無人機傾斜影像制作三維模型,速度快、成本低,成為城市三維建模的首選。 而無人機傾斜影像三維建模中,數據冗余、模型 變形、影像缺失等多種問題常常會影響建模效果。本文針對無人機傾斜影像三維建模中的問題,提出了一系列相應的模型精細化 處理技術,使三維模型更加形象、逼真。
傾斜影像是同時從多個角度采集的影像數據, 利用傾斜影像制作三維模型,不僅使高昂的三維建 模成本大大降低,而且有效提升了三維建模的速度 和效率。
目前,無人機傾斜影像構建的三維模型,為智慧城市建設及地形復雜的地質災害監測等提供了 全面、準確、詳細的三維地理信息,廣泛應用于多個領域。 然而,無人機傾斜影像三維建模實踐中, 在影像預處理、空中三角測量、模型建立后等各技術 環節,還存在數據冗余、模型變形、影像缺失等多種 問題。
筆者針對這些問題,提出了一系列相應的技術措施,使無人機傾斜影像三維建模實現了模型精細化。
1 無人機傾斜影像三維建模的關鍵技術
無人機傾斜影像三維建模的關鍵技術包括數據 預處理、空中三角測量、多視影像密集匹配、紋理映 射等[2]。
傾斜影像數據預處理主要為格式轉換、旋 轉影像、畸變差改正和增強處理。空中三角測量是以航空像片上量測的像點坐標為依據,采用嚴密的 數學模型,按最小二乘法原理,采用少量地面控制點 為平差條件,快速求解影像的定向及地面點加密問 題[3]。
傾斜影像的空三解算是將傾斜影像轉換為正射影像的過程,包括影像預處理、影像聯合平差、 基于特征點的影像匹配和正射影像的生成等步驟。
通常所用的影像匹配方法有基于像方灰度的匹配算 法,如相關函數法、協方差函數法、相關系數法、差平 方和法、差絕對值法、最小二乘影像匹配法等,還有一種影像匹配方法是基于像方特征的匹配算法,如 金字塔多級影像匹配算法、SIFT算法等[4]。
SIFT算 法在特征點提取的數量上有明顯的優勢,是從一幅 圖像中根據設定的閾值找到一個局部特征向量集, 可以很好地進行局部目標的識別與匹配存在較大變 形如旋轉、縮放、尺度改變的影像。
紋理映射是三維 模型制作流程的最后一步,也是增強模型視覺效果 的關鍵。 通俗地講,紋理映射就是二維到三維的映 射關系。
將紋理空間中的紋理像素映射到屏幕空間中的像素的過程,其實質是建立從屏幕空間到紋理 空間及紋理空間到景物空間的兩個映射關系[5]。
復雜的三維模型具有復雜的表面,需要多幅來自不 同視點的影像作為紋理圖,才能為整個模型進行紋理映射。
2 三維建模的問題及三維模型的精細化處理
2.1 影像預處理
2.1.1 影像畸變差校正
由于相機中心投影的特性,焦平面上不同區域 對影像的放大率不同而造成像片中心至像片邊緣的 變形依次增大。一般情況下,輕微的畸變對像片質 量影響不大,但是如果建筑物畸變太嚴重會歪曲拍 攝實物的幾何特征,需要對像片進行畸變校正。 影像畸變差校正的方法是:打開MapMatrix 軟 件—工具—數碼相機影像校正,然后打開去畸變工 具—添加影像—填寫校正參數—校正。校正界面如圖1所示
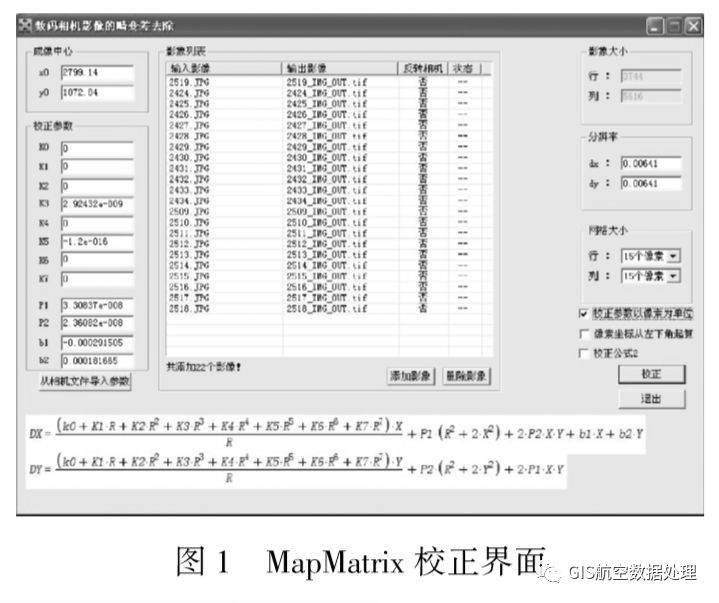
參數設置包括:坐標及單位定義、分辨率、成像 中心、校正參數、添加影像、網格大小、畸變去除。 設置好上述參數并檢查無誤后,點擊“校正”按 鈕,即可進行畸變差去除,完成后可在輸出文件夾生 成校正好的TIF和TFW文件。
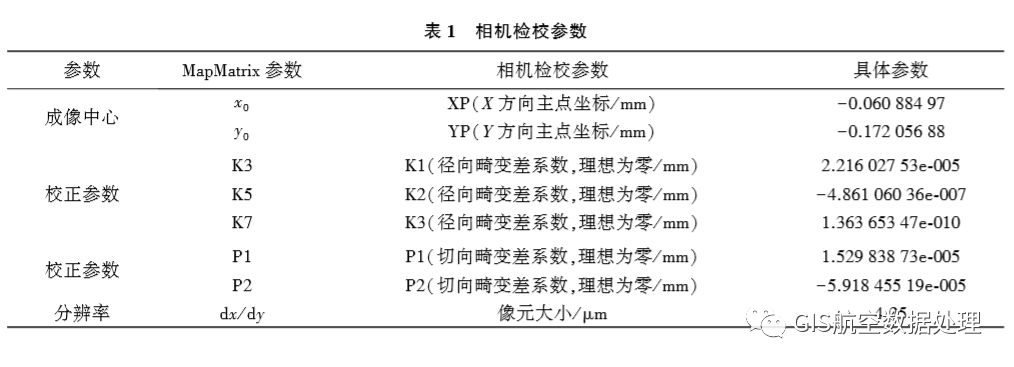
(1) 用相機檢校參數填寫見表1。
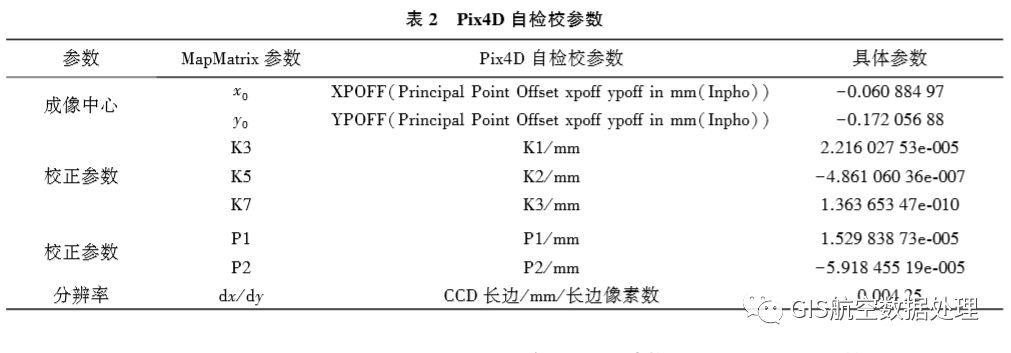
(2) 用Pix4D自檢校參數填寫見表2。
2.1.2 數據冗余與數據篩選方案
由于傾斜影像建模需要獲取側面紋理信息,且 實際地物情況復雜,因此,航攝重疊度設計偏高,采 集的影像數據量龐大,存在很大數據冗余[6]。 為了高效、快速建模就必須對影像進行篩選。
數據篩選具體方法為:首先對研究區域獲取的 POS數據進行編輯(POS數據編輯器),然后保存并 生成 KML 文件,其次將 KML 文件導入到 GoogleEarth中編輯屬性,更改圖標、顏色(如圖2 所示), 并把航線和影像設置為“貼于地面”(如圖3所示), 以便挑選。
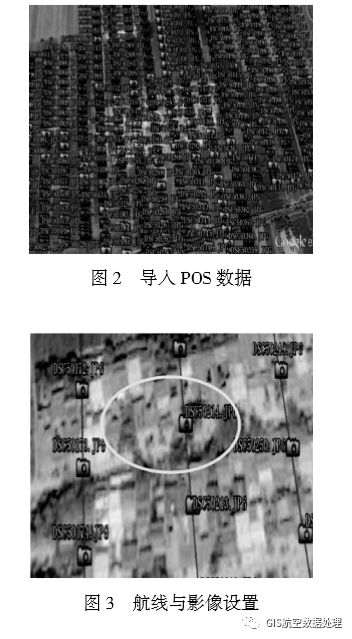
挑選原則主要是將航線與影像高度設置為“貼 于地面”,根據所需區域判斷該區域上方有哪幾張 影像,然后選擇離它最近的影像。 如圖3橢圓區域, 可以在保證重疊度的前提下選擇 DSC50214.jpg、 DSC50173.jpg、DSC50215. jpg、DSC50213. jpg 和 DSC50250.jpg這5張影像。
2.2 空中三角測量
2.2.1 模型變形及模型精細化處理
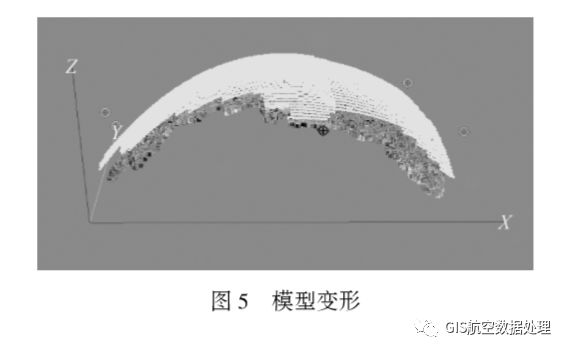
空中三角測量像片缺失是由于像片及POS參 數質量問題,匹配時出現錯誤,導致建模后期存在空 洞或模型變形。 像片缺失如圖4所示,圖中用圈圈 起來的是缺失的像片,模型變形如圖5所示。
針對空中三角測量時出現的模型變形,模型精 細化的處理方法有兩種。 第一種方法為:
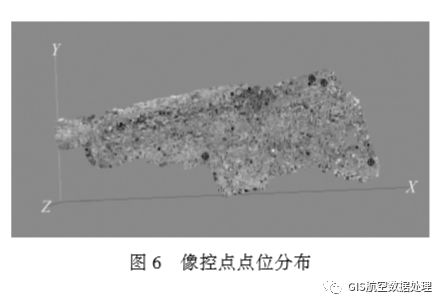
(1) 將像控點刺于相應像片中,同一地物至少 出現在3張像片上,像片控制點的目標影像應清晰, 易于判刺和立體量測。 像控點點位如圖6所示。
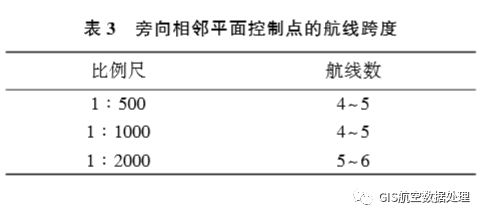
(2) 區域網布點方案為:對于兩條和兩條以上 的平行航線采用區域網布點時,要求如下: a. 航向相鄰平面控制點間隔基線數可參照 式(1)進行估算[7]

式中,ms 為連接點(空三加密點)的平面中誤差,單 位為毫米);K 為像片放大成圖的倍數);mq 為視差量 測的單位權中誤差,單位為毫米);n 為航線方向相鄰 平面控制點的間隔基線數。 b. 旁向相鄰平面控制點的航線跨度見表3。
c. 航向相鄰高程控制點間隔基線數可參照 式(2)進行估算[8]

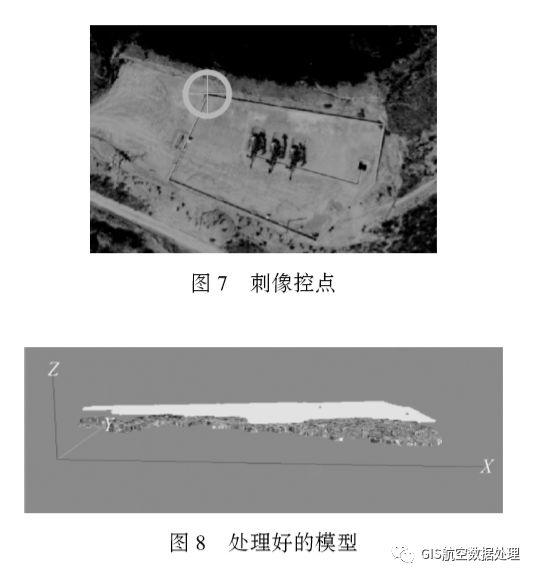
式中,mh 為連接點(空三加密點)的高程中誤差,單位為米(m);H 為相對航高,單位為米(m));b 為像片 基線長度,單位為毫米(mm));n 為航線方向相鄰平 面控制點的間隔基線數。 通過對航片刺入控制點,保證一個控制點至少 出現在3張像片上,像片刺控制點如圖7所示。 然 后進行空中三角測量計算像片的位置姿態參數,找 回丟失的航片,對于邊緣丟失的航片,選擇繼續通過 刺入控制點找回航片或將航片刪除,完成空中三角 測量航片缺失及模型變形問題的處理,處理好的模 型如圖8所示。
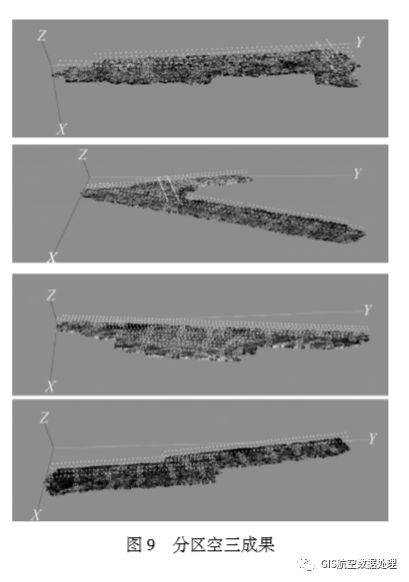
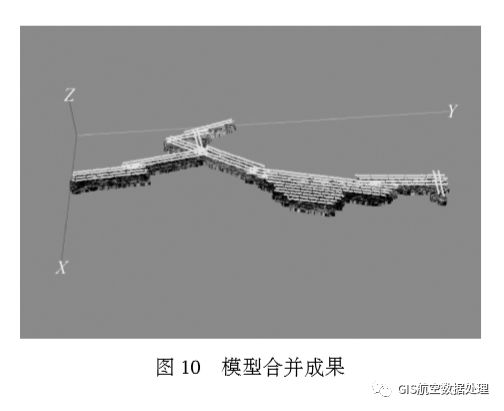
第二種方法為:對于帶狀測區,可以采用分區建模的方法進行空中三角測量,然后進行三維重建,最 后利用相鄰區域公共點對各區域的模型進行接邊, 可防止模型變形。 圖9為分區域建模的結果,圖10 為分區建模合成的結果。
2.2.2 不同建模方法比較
方法1:已經過畸變的像片加原始POS數據(經 緯度數據+HPR角元素系統)。
方法2:未經過畸變的像片加原始POS數據(經 緯度數據+HPR角元素系統)加畸變參數。
方法3:已經過畸變的像片加像片外方位元素 (XYZ+DPK角元素系統),然后在Smart三維中進行 空三加密,空三Setting步,選擇“adjust”。
方法4:已經過畸變的像片加像片外方位元素, 然后在Smart三維中進行空三加密,空三Setting步, 選擇“compute”。
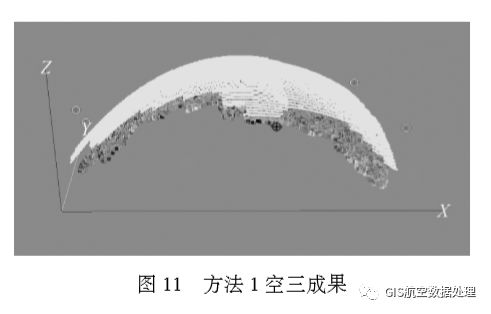
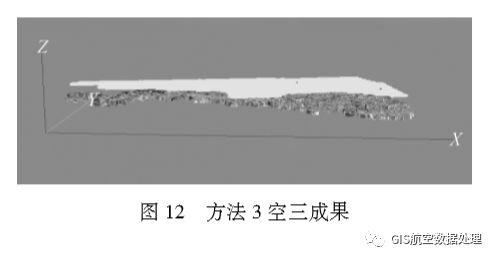
試驗1:利用同一測區的數據,運用方法1、方 法3、方法4在Smart三維軟件中分別進行空中三角 測量。 方法1用時最長,為5.5h,且空三加密成果變形,像片丟失 4 張,如圖 11 所示。方法 3 用時 1h,空三加密成果無變形,像片丟失2 張,如圖12 所示。 方法4用時2.5h,空三加密成果無變形,像 片丟失11張。 通過對3種方法的比較,方法3效果 最好,因此在有外方位元素的前提下,可以直接利用 方法3進行三維建模。
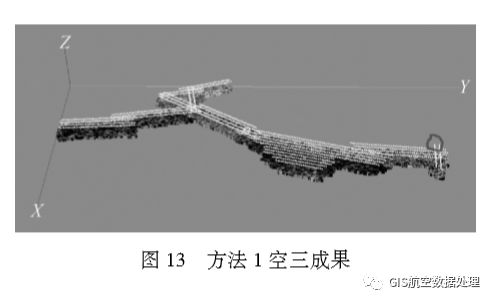
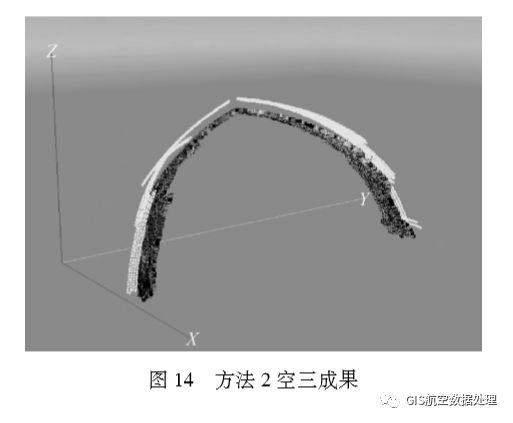
試驗2:利用同一測區的數據,運用方法1、方 法2在Smart三維軟件中分別進行空中三角測量。 利用方法1進行空三的過程中用時6.5h,像片丟失 15張,而且丟失的像片全部為航線拐角處,如圖13 中用圓圈標出來的地方。 因為拐角處的像片畸變比 較大,因此應該刪除拐角處的像片,然后再進行空中 三角測量。 利用方法 2 進行空三的過程中用時 8.5h,像片丟失19張,而且模型變形嚴重,如圖14 所示。 通過比較,方法1效果較好,因此在進行三維 建模時,可以首先對像片進行畸變校正。
利用Smart三維進行三維建模,各種數據來源 主要包括相機(單鏡頭、五鏡頭)、像片(經過畸變的 像片、未經過畸變的像片)、POS數據(經緯度+HPR 角元素系統、差分POS、經過空三加密獲取的外方位 元素)、像控點(GoogleEarth、RTK)。
通過對試驗1、試驗2的對比,得出五鏡頭相機 獲取的數據+經過畸變校正的像片+經過空三加密得出的外方位元素+使用RTK測得的像控點方法, 三維建模精度最高且用時最短。
2.3 模型變形與紋理缺失的模型精細化處理
2.3.1 模型變形與紋理缺失
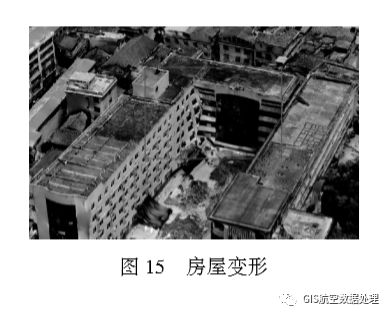
傾斜影像獲取數據的死角或數據點關聯不足的 地方,在模型匹配時會造成模型扭曲變形,主要是建 筑物或地物的底腳部位[9]。 房屋結構變形如圖15 所示。 水面、玻璃等表面無或少紋理,匹配不到特征 點而產生漏洞,如圖16所示。 旗桿、鐵塔、路燈、小 于一定厚度的廣告牌等,由于匹配截面過小,不能產 生足夠多的特征點,從而造成模型缺失,路燈變形如 圖17所示。

2.3.2 模型精細化處理
使用DPModeler軟件采用高分辨率的航空影像 通過透視成像原理,快速提取建筑物輪廓,自動紋理 映射,完成建模[10 ̄11]。 其中通過傾斜影像多角度觀 測建模,模型和影像完全套合,模型具有精確的三維 坐標信息,實現了模型貼圖自動從影像中采集,一鍵 完成模型貼圖[12]。 通過創建多級金字塔的影像結 構,支持超過一億像素的影像無縫調度,可以自動生 成真正射影像,修正建筑物的投影差,消除遮擋陰影 的問題,實現了對Smart三維自動建模中模型變形 的精細化處理。
(1)Smart三維輸出的數據格式為OSGB格式, DPModeler無法直接讀取 OSGB 格式的數據,因此 需要通過osgConv軟件將OSGB格式的數據轉化為 DPModeler可以識別的OSGB格式。
(2) 將數據導入DPModeler中進行模型精細化 處理。 對于模型不精細或變形的地方,通過“平面 選擇”工具,選擇需要修飾的模型范圍,然后通過重 建工具,進行模型重建,設置內收值,完成地面的 縫補。
(3) 在三維視圖中,顯示刪除的Mesh,根據顯 示的Mesh在三維自由視圖中,通過制作模型、自動 紋理映射步驟完成模型的重建,如圖18所示。
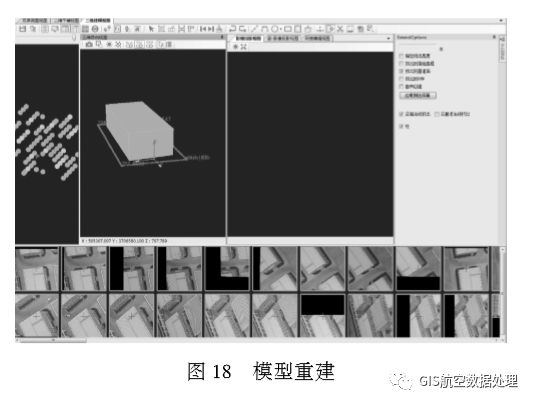
圖18中,最左邊為相機布局視圖,其中不同灰 度的點分別代表垂直影像、該范圍內的傾斜影像、計 算機優先選擇的影像。
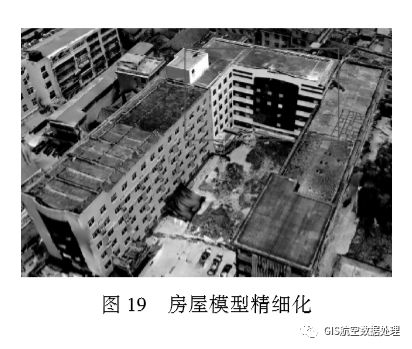
(4) 在紋理自動映射步驟,若紋理不清晰或不 完整,可以將該影像直接導入PS中進行處理,處理 完后,再導入DPModeler中進行紋理映射。 房屋精 細化處理結果如圖19所示,水面精細化處理結果如 圖20所示。

(5) 對于鐵塔、路燈、旗桿、小于一定厚度的廣 告牌,處理方法為在Smart三維中導出為OBJ格式 的數據,然后導入3dsMax中進行模型精細化處理, 完成制作模型與紋理映射步驟,最后再導入 Smart 三維中。 路燈精細化處理結果如圖21所示。

2.4 模型側面缺失紋理信息的處理方法
若測區四面環山,會造成測區高差較大,無人機 拍攝影像具有一定難度,因此只能用單鏡頭的相機 俯視拍攝。 由于影像數據是從空中俯視拍攝的,模 型缺少側面紋理信息,導致地面低處模型不完整。為彌補這一不足,可以利用地面拍攝影像與俯視拍 攝結合進行影像的獲取。
針對模型側面缺失紋理信息處理方法有兩種:
(1) 利用地面拍攝的影像進行三維建模,然后 替換單鏡頭俯視拍攝的建模成果,進行空地融合。
(2) 在低空對模型欠佳的地區進行無人機傾斜 影像采集,對于植被覆蓋區,進行正射影像采集,由 于高差較大,可對有房子的地區進行低空傾斜影像 的采集,確保地物紋理完整。
3 結 語
利用無人機傾斜影像進行三維模型制作是目前 廣泛采用的三維建模方式,本文通過對無人機傾斜 影像三維建模實踐中經常遇到的問題進行分析,提出了一系列的三維模型精細化處理方法,以期對無人機傾斜影像三維建模實踐有一定的參考和借鑒的價值。
-
無人機
+關注
關注
228文章
10342瀏覽量
179640 -
三維模型
+關注
關注
0文章
49瀏覽量
13102
原文標題:無人機傾斜影像三維建模中的模型精細化
文章出處:【微信號:ittbank,微信公眾號:ittbank】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論