 DME應答接收機系統設計
DME應答接收機系統設計
摘要:
應答接收機是通用航空測距機地面設備的核心,接收來自飛機的高斯脈沖對測量其與地面臺之間的距離。接收機采用數字化、模塊化的設計方法,按功能劃分成不同的模塊,以FPGA為核心進行設計。將設計分為接收機通道部分和后端信號處理部分兩大模塊,其中,接收機通道部分又分為射頻處理、半幅檢波等模塊;后端信號處理部分又分為譯碼編碼、莫爾斯識別脈沖生成、發射脈沖優先權控制等模塊。經測試表明,電路性能穩定,工作可靠。
0 引言
距離測量設備(Distance Measuring Equipment,DME)是國際民航組織(ICAO)批準的標準導航系統[1],由地面設備和機載設備兩部分組成,為飛機提供相對于地面臺的斜距[2]。
隨著通用航空迅速的發展,天空中的飛行器會越來越多,這就對接收機的處理能力提出了更高的要求[3]。目前現有接收機采用模擬信號接收機,本設計充分利用FPGA的并行處理能力,大大提高了信號處理速度,提高了系統的容量。本次設計的數字接收機將在射頻端完成數字化。
1 DME應答接收機系統設計
DME是一種詢問回答式脈沖測距系統,距離是通過對無線電脈沖信號在飛機與地面信標之間往返時間的測量獲得的[4]。DME測距系統簡化組成如圖1所示。
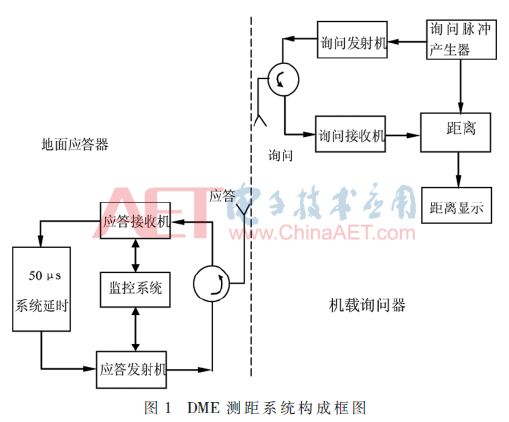
地面應答器接收機接收到機載詢問器發射機發射來的詢問脈沖信號,經過一個固定的延時后轉發一個適當的回答信號[5]。該回答信號由機載設備接收,通過計算機載發射信號與接收信號之間的延時時間,得出飛機與地面臺間的斜距,如式(1)所示。

式中:T為DME機載設備測量得到的發射和接收信號之間的時間間隔;T0為系統延時,即DME地面臺內部的固定時延,一般為50 μs;C為電磁波傳播速度,即光速。
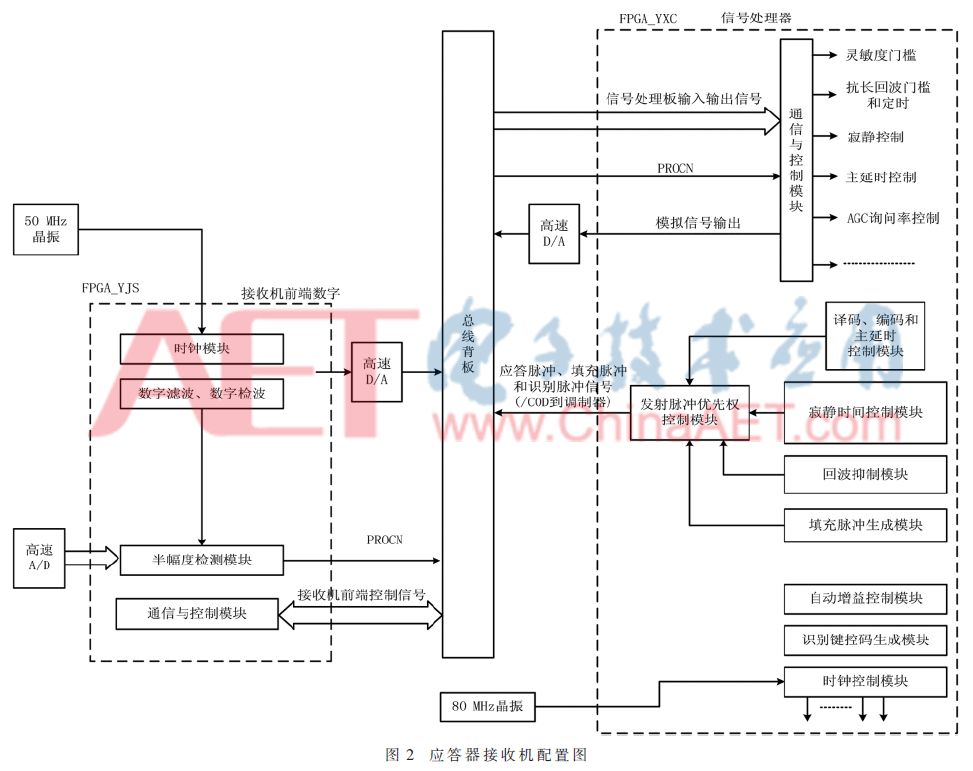
針對DME應答器接收機的功能與特性,將其分為接收機通道和信號處理兩個模塊進行研究,應答接收機配置如圖2所示。
2 接收機通道模塊設計
接收機通道的作用從整體來說是接收發來的詢問信號,進行判斷處理,若為有效信號,則發送給信號處理板。接收機通道硬件組成如圖3所示。
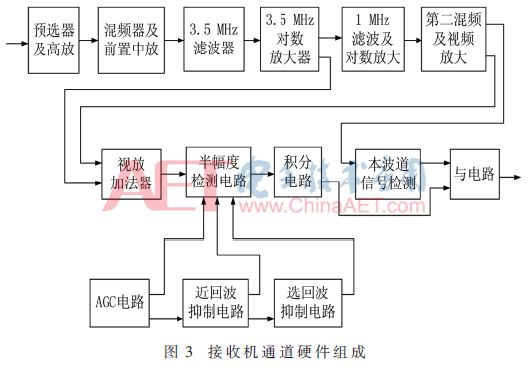
2.1 射頻處理模塊
預選器、射頻放大器和第一混頻器可以起到抑制發射頻率信號、鏡像頻率信號和其他雜散信號、低噪聲放大天線接收到的信號及轉換接收頻率為63 MHz中頻的作用。
2.2 半幅度檢測電路
半幅度檢測電路是接收機通道的核心,主要包括:
(1)視頻運算放大器:63 MHz檢波輸出與來自調制器的接收機禁止脈沖都送至視頻運算放大器。
(2)峰值監測器:峰值監測器檢測已被衰減一半的詢問視頻信號的峰值。
(3)觸發比較器:當詢問視頻信號大于靈敏度門檻設置時,當詢問視頻信號大于自動增益降低控制電壓時,當詢問視頻信號大于抗回波制約值時(制約值=直達波+3 dB),觸發半幅檢波“使能”信號。
2.3 詢問觸發產生電路
半幅度檢測電路輸出較寬的觸發脈沖,經微分電路變成寬度為100 ns的脈沖,受鑒頻器的控制,輸出詢問觸發脈沖,送至信號處理作進一步的信號處理。
3 信號處理模塊設計
信號處理器承擔著系統所有信號的譯碼、編碼、識別脈沖的生成、信號發射順序等工作,它也是測距系統中重要的組成部分之一。
3.1 譯碼器
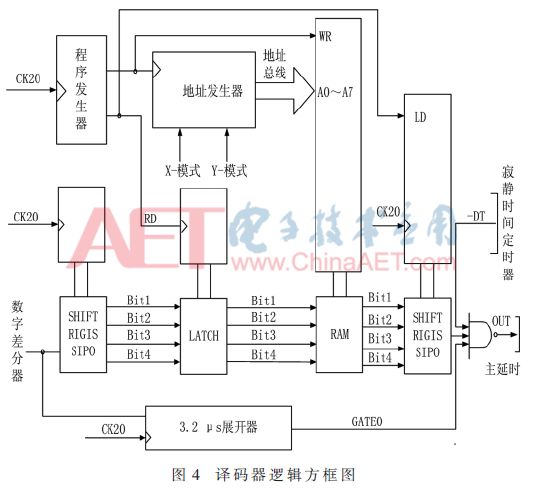
譯碼器受控制器的控制,有X—模式、Y—模式等二種譯碼時間的設置。信號處理譯碼器的邏輯原理關系示于圖4。
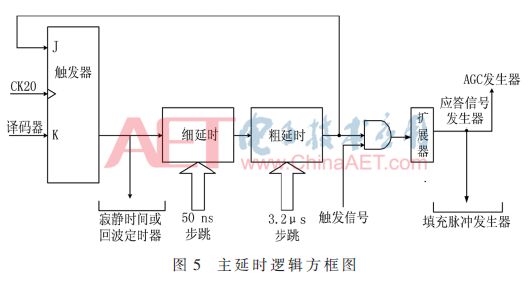
3.2 主延時
主延時受控于控制器,根據兩個監測器對應答延時的監測結果,求出應有的主延時量,主延時結束時產生應答觸發脈沖。主延時原理方框圖示如圖5。
3.3 信號處理模塊邏輯設計
譯碼編碼、自動增益控制等模塊是利用狀態機轉換進行編寫的。狀態機共分為4個狀態:rev_s0、rev_s1、rev_s2、rev_s3,具體實現流程如圖6所示。
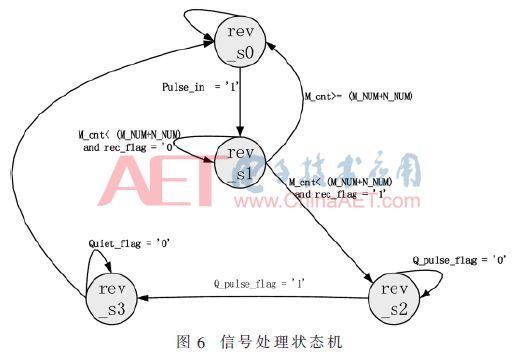
其中,rev_s0為等待狀態,當有詢問脈沖到來時進入rev_s1狀態。
在rev_s1狀態下,判斷是否為有效的詢問脈沖,如果是有效的詢問觸發脈沖,則進入rev_s2狀態。
在rev_s2狀態下,判斷應答脈沖是否發送完畢,如果發送完畢,則進入rev_s3狀態。
在rev_s3狀態下,判斷靜寂時間是否結束,如果靜寂時間結束,則返回rev_s0的等待狀態。
4 應答接收機功能仿真與測試
采用Xilinx ISE Design Suite 13.1自帶仿真軟件I-sim進行仿真[6]。
4.1 接收機通道功能仿真
A/D采樣數據仿真(由十進制表示)如圖7所示。
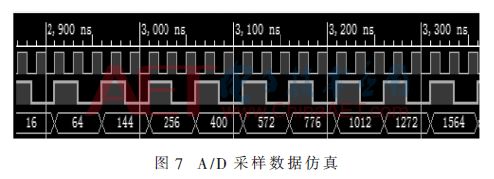
在上述仿真示意圖中,系統時鐘為50 MHz,A/D采樣頻率為20 MHz,A/D采樣到的數據是經過MATLAB模擬出來以供仿真使用。
根據脈沖檢測模塊的工作原理,如果接收到的高斯脈沖對是有效的,而且半幅度值計算也正確,那么可以通過詢問觸發脈沖的檢測確定該模塊的正確性,詢問觸發脈沖的仿真如圖8。
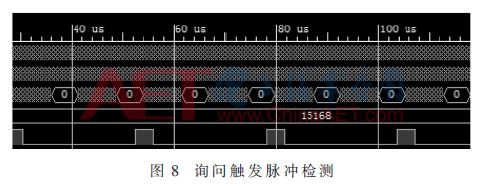
如上圖所示,圖中前兩行為系統時鐘和A/D采樣時鐘,第三行每一個陰影部分表示一組數據。因此,可以看到每兩個數據組結束后,第五行將會生成一個詢問觸發脈沖,表示接收機通道模塊的功能已經實現。
4.2 信號處理功能仿真
采用接收機通道生成的詢問觸發脈沖,對信號處理模塊功能進行檢驗。首先,應答脈沖的生成仿真如圖9所示。
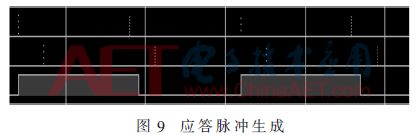
如圖9所示,第一行為詢問觸發脈沖,第二行為應答脈沖,二者之間有一個固定延時,用來進行距離測量。信號處理模塊功能得以實現。
4.3 測試結果
首先,檢測A/D能正常工作之后,對接收機通道模塊的有效性進行驗證,詢問觸發脈沖經示波器顯示,當發送脈沖為符合半幅脈沖檢測要求的高斯脈沖對時,測得實際接收到的詢問觸發脈沖寬度為12.2 μs,與12 μs的標準脈沖相差0.2 μs,符合要求。
信號處理模塊接收到詢問脈沖對,進行譯碼處理,并生成莫爾斯識別脈沖。通過示波器觀察,測試結果如表1所示。

如上表所示,經過大量試驗后,詢問脈沖對與應答脈沖之間的固定延時最大為50.4 μs,與設置的50 μs標準延時相差最大0.4 μs,在誤差范圍內。因此,信號處理模塊的譯碼功能得以實現。
莫爾斯脈沖的生成,是以1 MHz為時鐘基準,分頻產生1 350 Hz的脈沖方波,方波寬度為1 μs,1 350 Hz的脈沖方波作為MORSE碼的點或劃的調制輸出脈沖,因此1 M/1 350=741 μs。根據表1統計,每兩個脈沖之間最大間隔為744 μs,符合要求。
5 結論
本文對DME應答接收機的設計方法進行了研究,通過模擬飛機發送的高斯詢問脈沖對應答接收機進行測試,從測試結果可以看出該接收機可以正常接收并生成應答脈沖,實測結果符合理論分析。此外,通過模擬畸變的詢問脈沖對對接收機抑制回波、抗干擾等性能測試,從各個指標的測試結果來看,半幅檢波的功能得以實現,且識別脈沖、隨機脈沖、靈敏度控制等功能均滿足系統設計要求。目前,本接收機已制成樣機,投入調試使用。
-
接收機
+關注
關注
8文章
1179瀏覽量
53407 -
測距系統
+關注
關注
0文章
27瀏覽量
9569 -
模擬信號
+關注
關注
8文章
1116瀏覽量
52395
原文標題:【學術論文】DME應答接收機技術研究
文章出處:【微信號:ChinaAET,微信公眾號:電子技術應用ChinaAET】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
雷達接收機噪聲系數定義 接收機噪聲系數是多少

基于DSP的新型漢字NAVTEX系統接收機的設計

利用ACK應答測量WLAN接收機指標的方法介紹
制冷接收機真空窗口干燥的充氣系統

GNSS接收機是什么?怎么分類的?
什么是北斗接收機?你了解北斗接收機嗎?





 工商網監
工商網監
評論