 舵機是由什么組成_舵機的結構及原理
舵機是由什么組成_舵機的結構及原理
舵機是一種位置(角度)伺服的驅動器,適用于那些需要角度不斷變化并可以保持的控制系統。目前,在高檔遙控玩具,如飛機、潛艇模型,遙控機器人中已經得到了普遍應用。本文首先介紹了舵機的組成及結構原理,其次介紹了舵機的控制及追隨性,最后介紹了舵機接線方法(三線接線法)以及安裝。
舵機是由什么組成
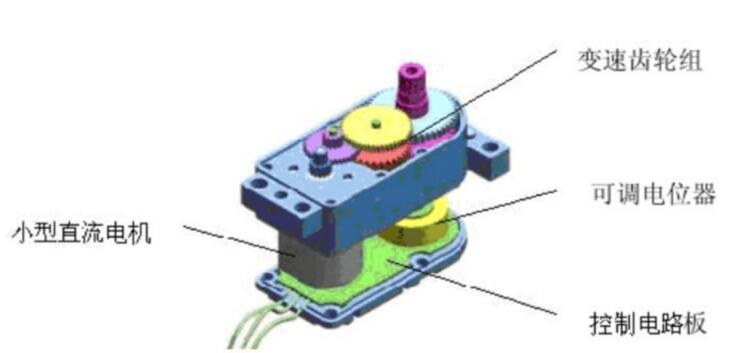
一般來講舵機主要由以下幾個部分組成,舵盤、減速齒輪組、位置反饋電位計、直流電機、控制電路等,如圖4、圖5所示。
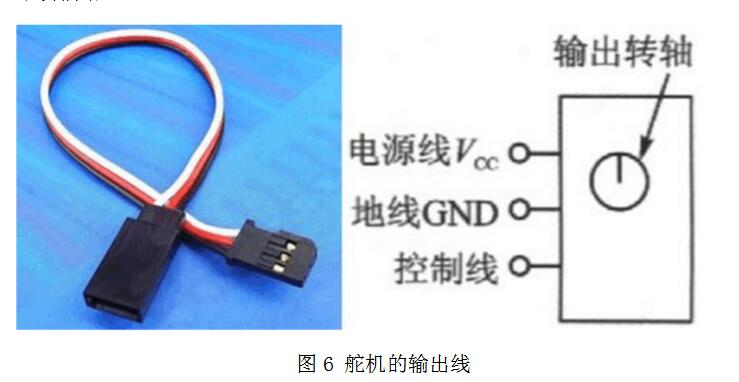
舵機的輸入線共有三條,如圖6所示,紅色中間,是電源線,一邊黑色的是地線,這輛根線給舵機提供最基本的能源保證,主要是電機的轉動消耗。電源有兩種規格,一是4.8V,一是6.0V, 分別對應不同的轉矩標準,即輸出力矩不同,6. OV對應的要大一些,具體看應用條件;另外一根線是控制信號線,Futaba 的一般為白色,JR的一般為桔黃色。另外要注意一點,SANWA的某些型號的舵機引線電源線在邊上而不是中間,需要辨認。但記住紅色為電源,黑色為地線,一般不會搞錯。
舵機的結構及原理
舵機安裝了一個電位器(或其它角度傳感器)檢測輸出軸轉動角度,控制板根據電位器的信息能比較精確的控制和保持輸出軸的角度。這樣的直流電機控制方式叫閉環控制,所以舵機更準確的說是伺服馬達,英文 servo.舵機組成: 舵盤、 減速齒輪、 位置反饋電位計、直流電機、 控制電路板等。
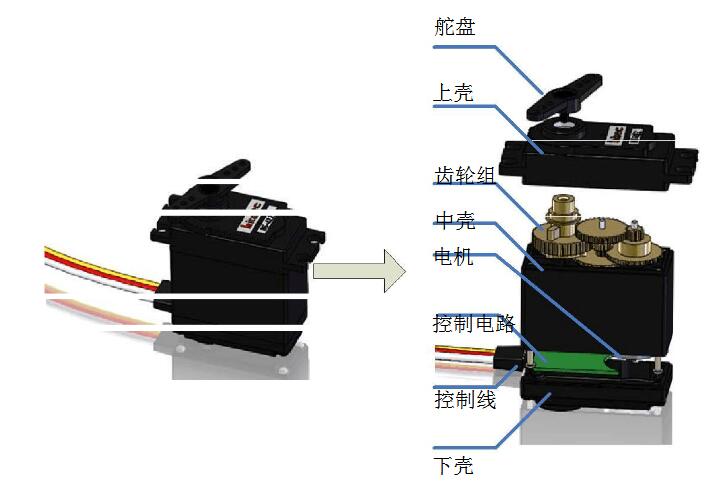
控制電路板接受來自信號線的控制信號,控制電機轉動,電機帶動一系列齒輪組,減速后傳動至輸出舵盤。舵機的輸出軸和位置反饋電位計是相連的,舵盤轉動的同時,帶動位置反饋電位計,電位計將輸出一個電壓信號到控制電路板,進行反饋,然后控制電路板根據所在位置決定電機轉動的方向和速度,從而達到目標停止。
其工作流程為:控制信號→控制電路板→電機轉動→齒輪組減速→舵盤轉動→位置反饋電位計→控制電路板反饋。
舵機的控制及追隨性
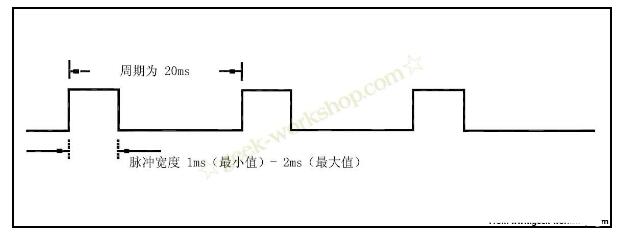
舵機的控制一般需要一個20ms左右的時基脈沖,該脈沖的高電平部分一般為0.5ms-2.5ms范圍內的角度控制脈沖部分,總間隔為2ms。以180度角度伺服為例,那么對應的控制關系是這樣的:
0.5ms--------------0度;
1.0ms------------45度;
1.5ms------------90度;
2.0ms-----------135度;
2.5ms-----------180度;
舵機的追隨特性
假設現在舵機穩定在A點,這時候CPU發出一個PWM信號,舵機全速由A點轉向B點,在這個過程中需要一段時間,舵機才能運動到B點。
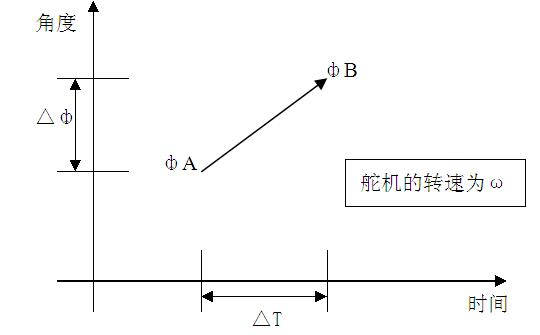
保持時間為Tw
當Tw≥△T時,舵機能夠到達目標,并有剩余時間;
當Tw≤△T時,舵機不能到達目標;
理論上:當Tw=△T時,系統最連貫,而且舵機運動的最快。
實際過程中w不盡相同,連貫運動時的極限△T比較難以計算出來。
假如我們的舵機1DIV =8us,當PWM信號以最小變化量即(1DIV=8us)依次變化時,舵機的分辨率最高,但是速度會減慢。
舵機接線方法(三線接線法)
(1)黑線(地線)
紅線(電源線)兩個標準:4.8V和6V藍線/黃線(信號線)
(2)棕線(地線)
紅線(電源線)兩個標準:4.8V和黃線(信號線)
舵機的性能及安裝
舵機是遙控模型無線電操縱系統中很重要的部件。如果不了解它的性能,不講究正確的安裝方法,輕則影響模型的飛行姿態,重則如果卡住模型則無法操縱,造成事故的發生。所以,在使用舵機前,了解它的性能和安裝方法是必要的。
日前市場上出售的模型舵機,主要是比例式的,類型有普通型、超小型,強力型和特殊用途型等幾種。下面分別介紹一下它們各自的性能。
普通型:
45克,0.2秒/60度,力矩3千克·厘米。這種舵機各方面性能都比較適中,一般用在尺寸不是很大的P3A-1、2和P2B-1、2等模型上。
超小型:
20克,0.15秒/60度,力矩2千克·厘米。它的體積小、重量輕,輸出力矩小,通常用于小尺寸、舵面阻力相對小的模型上,如P5A、小型電動類模型等。
強力型:
100克,0.2秒/60度,力矩9千克·厘米。這種舵機輸出力矩大,可以克服高速、大舵面帶來的阻力大的缺點。主要用于尺寸和飛行重量大,速度快,舵面阻力大的模型,如F3A、大型仿真飛機模型、現代特技飛機模型、噴射模型飛機和F4級模型等。
特殊用途型:
多數特殊用途的舵機,其性能與強力型相似。通常用于專項任務,如收索機(帆船)、起落架蛇機等。另外,還有—些耐高溫和可防水的舵機,主要用于科學研究和工業方面,一般模型很少采用,但近年來這種舵機隨著模型產品的發展在民用模型領域發展迅速。
—般的舵機內部的電路和齒輪等零什都是很精細的,自己較難制作,多采用成品舵機。日產成品舵機品質較好,剩余功率大,不易打齒、比較耐用。國產舵機質量有的也不錯。安裝舵機也很重要,安裝方法主要有三種:
(1)用膠直接把舵機粘在模型上。要求帖接技術較高,不能更換, 通常用于一些簡單模型。
(2)對好舵機兩邊的安裝孔,用螺釘固定。這種方法的好處是容易更換。
(3)利用配套的固定片及減震片固定。對丁裝大容積內燃機的模型,為了減少振動對舵機的損害,多采用這種方法。
舵機的安裝位置應盡量靠近模型的重心。有條件時,舵機和接收機應盡量分別使用電源。電源電壓不足時,應立即更換,以免舵機操縱失靈導致空中停機。舵機輸出盤(搖臂)不同的角度和力臂孔,應盡量選擇力臂大的,這樣可以減小舵機負荷。輸出盤與舵面,可以專用聯桿或鋼絲連接,前者效果較好
最后說明一下,對于—些電動模型的動力電機控制,原來用一個舵機作開關,但作用不大,后來有些人用直接粘一個電位器的辦法來對電機進行無級操縱。現在,有些廠家已生產出成品的無級變速器(現在叫電調), 直接插在一個通道中,對電機進行加、減速等無級控制,既輕巧,又經濟。不過,為了考慮車、船模使用,變速器有順、逆轉功能,而在航模上只允許用順轉功能。因此,用在航模上時,最好請專人對它的電路進行一下改裝,防止操縱失誤。變速器最好單用一組動力電源,如果同時使用接枚機電源,將會影響接收機的工作和舵機的動作
精彩閱讀推薦:
-
舵機
+關注
關注
17文章
264瀏覽量
40952
發布評論請先 登錄
相關推薦
舵機的基本結構和原理,如何通過PWM信號控制舵機
舵機的概念、結構以及類型概念
舵機控制原理是什么_舵機的控制方法
數字舵機控制原理是什么_數字舵機與模擬舵機的區別
舵機的基本結構和原理,以及如何通過PWM信號控制舵機
舵機詳解

舵機是什么?舵機內部結構解析





 工商網監
工商網監
評論