 一文詳解伺服系統需求重點在哪里
一文詳解伺服系統需求重點在哪里
機器人作為典型的機電一體化技術密集型產品,它是如何實現運作的?據了解,機器人的控制分為機械本體控制和伺服機構控制兩大類,伺服控制系統則是實現機器人機械本體控制和伺服機構控制的重要部分。因而要了解機器人的運作過程,必然繞不過伺服系統。
伺服系統是以變頻技術為基礎發展起來的產品,是一種以機械位置或角度作為控制對象的自動控制系統。伺服系統除了可以進行速度與轉矩控制外,還可以進行精確、快速、穩定的位置控制。
機器人對關節驅動電機的要求非常嚴格,交流伺服電機在工業機器人中得到廣泛應用。機器人對伺服電機的嚴格要求:
1)快速響應性,電伺服系統的靈敏性愈高,快速響應性能愈好。
2)起動轉矩慣量比大,在驅動負載的情況下,要求機器人的伺服電機的起動轉矩大,轉動慣量小。
3)控制特性的連續性和直線性,隨著控制信號的變化,電機的轉速能連續變化,有時還需轉速與控制信號成正比或近似成正比,調速范圍寬,能使用于1:1000~10000的調速范圍。
4)體積小、質量小、軸向尺寸短,以配合機器人的體形。
5)能經受得起苛刻的運行條件,可進行十分頻繁的正反向和加減速運行,并能在短時間內承受數倍過載。交流伺服驅動器因其具有轉矩轉動慣量比高、無電刷及換向火花等優點,在工業機器人中得到廣泛應用。
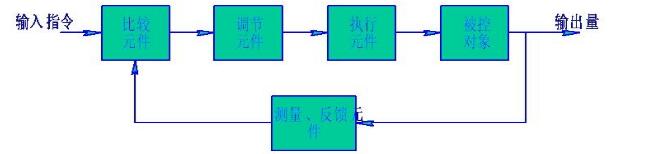
伺服的控制原理
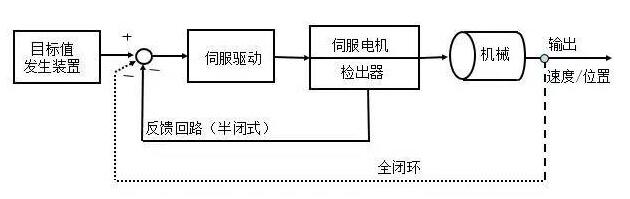
伺服系統的最大特色:透過回饋信號的控制方式〔可做指令值與目標值的比較,因而大幅減少誤差狀況〕。
何謂回饋信號:向控制對象下達指令后,正確的追蹤并查明現在值,且隨時回饋控制內容的偏差值、待目標物到達目的地后,回饋位置值,如此反復動作。
控制流程:檢測機械本體之位置檢出,回路為封閉系統,稱之為全閉回路 。相反,檢測馬達軸端之回路系統就稱為半閉回路。
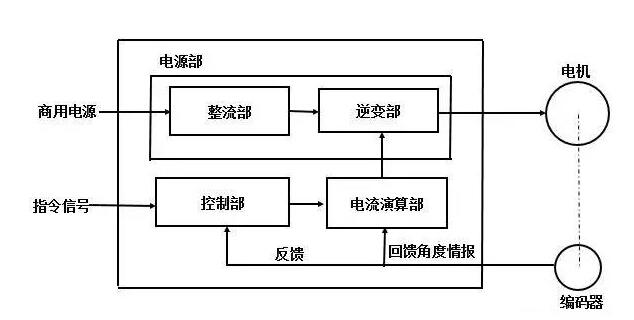
伺服驅動器的內部構成
整流部:通過整流部,將交流電源變為直流電源,經電容濾波,產生平穩無脈動的直流電源。
逆變部:由控制部過來的SPWM信號,驅動IGBT,將直流電源變為SPWM波形,以驅動伺服電機。
控制部分:伺服單元采用全數字化結構,通過高性能的硬件支持,實現閉環控制的軟件化,現在所有的伺服已采用(DSP數字信號處理)芯片,DSP,能夠執行位置、速度、轉矩和電流控制器的功能。給出PWM信號控制信號作用于功率驅動單元,并能夠接收處理位置與電流反饋,具有通訊接口。
編碼器:伺服電機配有高性能的轉角測量編碼器,可以精確測量轉子的位置與電機的轉速,
逆變器采用新型電力電子半導體器件 目前,伺服控制系統的輸出器件越來越多地采用開關頻率很高的新型功率半導體器件,主要有大功率晶體管(GTR)、功率場效應管(MOSFET)和絕緣門極晶體管(IGPT)等。這些先進器件的應用顯著地降低了伺服單元輸出回路的功耗,提高了系統的響應速度,降低了運行噪聲。尤其值得一提的是,最新型的伺服控制系統已經開始使用一種把控制電路功能和大功率電子開關器件集成在一起的新型模塊,稱為智能控制功率模塊(Intelligent Power Modules,簡稱IPM)。這種器件將輸入隔離、能耗制動、過溫、過壓、過流保護及故障診斷等功能全部集成于一個不大的模塊之中。其輸入邏輯電平與TTL信號完全兼容,與微處理器的輸出可以直接接口。它的應用顯著地簡化了伺服單元的設計,并實現了伺服系統的小型化和微型化。
智能機器人
現代制造業的生產模式正從大批量、標準化生產,往小批量、定制化、個性化的生產方向轉變,這種變化對于機器人產品和智能裝備的需求與日俱增,其中也包括對制造設備的柔性、可重構性和成本效益等方面都提出了一定的要求。
另一方面,未來制造業所面臨的挑戰有:新一輪的工業革命呼喚機器人發展;勞動力成本上升加速機器人應用需求;新技術進步促進提升機器人性能;客戶定制化依賴機器人制造。制造業的三項關鍵技術正在發生著重大轉變:生產方式朝著數字化制造、生產決策朝著人工智能、生產工具朝著智能型機器人方向演進,用機器人來武裝中國制造是轉型升級的唯一出路,機器人與新一代信息技術(物聯網、大數據、云計算和人工智能等)的融合,將對人類的生產、生活產生革命性的顛覆。
從產業鏈來看,機器人的上游關鍵零部件行業包括伺服電機、伺服系統、精密減速器、控制系統等等,下游行業主要包括機器人的相關系統集成商,目前國內大約有1000多家機器人相關企業,其中約有50多家是上市公司。
傳統的機器人更偏向于是一類“機器”,它比較簡單,而且適應性也較差,但今天,技術進步徹底提升了機器人的性能,機器人開始由“機器”向“人”的方向進化。這類智能型機器人更加復雜、高級,適應能力也更強,并且在此基礎之上,將形成一套智能制造的生產模式,具備智能化、數字化、網絡化、定制化的“四化”特點,即智能機器成為生產主力,產品與設備信息可采集、存儲和分析,產品與設備信息可聯網,按客戶訂單來設計,甚至單元產品個性化,機器人在智能制造模式變革中將發揮重要支撐作用。
目前,機器人應用正逐漸從以汽車行業代表的高端市場客戶,走向普通市場客戶,其中包括電子制造行業、五金衛浴、金屬加工等民生領域。另一個重要的發展趨勢是,機器人的市場應用正在由單機系統(如:機器人點焊系統、汽車總裝AGV、機器人機床上下料等)向數字化工廠邁進,這些都是值得大家關注和探索的方向。
機器人應用對伺服的需求重點
一般來說,傳統的工業機器人應用對伺服系統的要求主要都是單軸伺服驅動器加電機,每個驅動器單獨接入交流電,制動能量靠制動電阻消耗;而現在,越來越多的機器人應用要求使用共直流母線驅動器+電機的方案,具備公共的直流母線電源模塊,能回收利用制動回饋能量,提高效率,降低交流輸入級的成本,且系統結構緊湊,能適合機器人的運行工況。
伺服系統的部分主要參數包括:速度環帶寬(幾百Hz到3KHz);速度波動率、轉矩控制精度,這些直接影響到機器人行走的軌跡精度和定位精度;慣量適用范圍,即機器人帶著負載的情況下,或是在做運動時,其運動速度和運動軌跡都有可能發生改變,這對于每個關節來說會產生不同的影響,因此對伺服的慣量也有一定的要求,總體來說就是適用范圍要擴大。
在電機方面,目前工業機器人上用到的電機基本上都是永磁同步電機,反饋裝置大多是多圈絕對值編碼器(也有用旋轉變壓器的),且帶有制動器,讓機器人在下電時保持一個姿態。
在伺服驅動器方面,工業機器人一般采用的是總線通信型產品(EtherCAT、CAN等),以實現位置、速度、電流環控制;同時驅動器還要具備振動抑制功能;并要集成安全功能,以保證機器人安全轉矩關斷、安全停止、安全制動控制等運行要求;另外,為了實現電機的恒功率擴速運行,就需要具有弱磁功能。
對于協作機器人來說,它相對于傳統工業機器人應用來說,還應注意以下幾個特點:
①關節一般都是一體化的,因此包括編碼器、驅動器、減速器、電機、制動器等都需采用集成式設計。
②協作機器人的負載自重比較大,基本可以達到1:7到1:3,目前國內技術還做不到后者。
③要求有良好的人機協作性能,傳統的工業機器人不具備人和機器人直接接觸的能力,但現在,一些機器人具備了力感知功能,可以與人進行安全協作。
除了電機之外,協作機器人對伺服驅動器有一些特殊的需求,其中包括:由于協作機器人的走線和執行機構的穿氣管都在內部,所以要求電機、減速器、驅動器等都要放在一個大中空的結構里;一般來說都采用無框電機,永磁定子、轉子分體設計;無論是驅動器還是電機都要求尺寸小、功率密度高,可以集成在有限的空間內;直流24V或者48V供電,并可方便搭載在電池供電的移動機器人上。而對于移動機器人來說,它的特點主要是輪式結構,用于室內或室外的移動作業,包括雙輪差動、四驅、全方位輪等,直流無刷/有刷電機,反饋裝置多用增量式編碼器和數字HALL,一般配合行星減速器來使用。
以全產業鏈布局應對開發
新松機器人在開發上有著全產業鏈布局。最近幾年,首先在機器人控制器這一塊,我們在2017年將通用機器人控制器升級到SIRC感知智能型機器人控制器,能夠在非結構化的工作環境中進行人機安全協作,且包括豐富的機器人模型、軌跡規劃、智能感知算法,以及激光導航、視覺感知、力感知等功能。其次,新松在新型柔性協作機器人、雙臂協作機器人、輕載復合機器人、協作機器人+AR技術、智能服務機器人、醫療輔助機器人等開發領域均取得了顯著的成績。
在智能機器人技術的研究上,總體來說,未來的智能型機器人將具有感知能力,能在復雜的環境里面精確地感知環境特征;具備共融作業技術,能建立人機和諧共存的行為方式和安全機制;具有交互能力,能實現機器人之間、機器人與人之間的自然交互;另外,智能型機器人還將具備任務與決策技能,能夠完成復雜任務和智能決策。
-
機器人
+關注
關注
210文章
28205瀏覽量
206527 -
伺服系統
+關注
關注
14文章
561瀏覽量
39179
發布評論請先 登錄
相關推薦

伺服系統是什么_伺服系統的基本要求_伺服系統的基本組成
伺服系統什么意思_伺服系統的作用是什么
伺服系統應用于哪兒_伺服系統應用實例
一文知道伺服系統設計步驟及方法
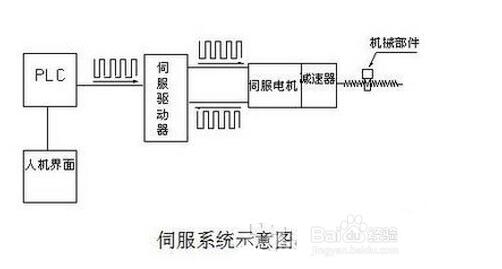
PLC控制伺服系統步驟_西門子PLC控制的伺服控制系統詳解
主軸伺服系統的故障診斷方法有哪些
基于自抗擾控制的雙環伺服系統詳解






 工商網監
工商網監
評論