 關于基于視覺顯著性的LED晶圓自動提取系統
關于基于視覺顯著性的LED晶圓自動提取系統
0 引言
目前LED外延片生產過程中,由于生產工藝本身原因,導致LED晶粒存在諸多缺陷,如缺角、劃痕、電極污染等,在測試中分選機無法通過電特性對晶粒進行剔除,只能通過人工剔除有缺陷的晶粒,如此導致晶粒數量處于未知狀態,也就是無法確切知道晶粒數量,首先需要通過晶圓提取系統來有效統計計算晶粒范圍。
通常晶圓貼在藍膜或者白膜上,然后再貼在黃色離型紙上,LED計數儀通過背光照射晶圓,由于黃色離型紙為非均勻材質,導致成像灰度不均勻,晶圓以外的地方容易造成誤識別,所以需要解決精確提取晶圓問題。
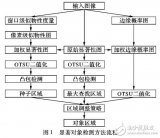
目前LED晶圓提取系統一般采用降低分辨率,設定一個統一閾值,將晶圓范圍從離型紙背景中分割出來。這類方法存在其局限性,統一的閾值對非均勻亮度圖像存在極大的誤差,漏識別或者多識別的概率偏高,對晶圓邊緣的提取精度較低[1],僅為98.47%。由此設計一種基于視覺顯著性的晶圓范圍提取系統,有效解決了精準自動提取晶圓范圍問題。應用邊界連接度優先的算法,將晶圓從背景中有效提取出來。主要依據晶圓圖像目標居中,且目標基本不與邊界相接觸的特點,與邊界大面積接觸的則屬于背景區,可以直接將圖像邊緣信息當作背景來處理,通過像素與邊界點的連接度來識別圖像空間布局,精確提取晶圓的邊緣。整個系統由晶圓圖像采集模塊、晶圓目標提取模塊兩部分構成,如圖1所示。
1 晶圓采集模塊
晶圓采集模塊主要通過調整光源亮度,并通過評價圖像亮度函數計算出控制量,反饋給光源控制器,對光源進行閉環控制,確保得到適合系統亮度的晶圓圖像。相機驅動模塊主要負責相機與計算機的通信,將圖像數據放入計算機內存,供后續圖像處理使用。
2 晶圓目標提取模塊
一般在實際應用中,對晶圓非均勻亮度圖像目標提取主要采用閾值化方法,LI C M等人的LBF(Local Binary Fitting)模型[2]中最大的特點是利用高斯函數取得圖像的局部灰度信息,圖像雖然在整體上存在灰度不均勻,但是在局部,灰度可以近似地認為不存在偏差場。LBF模型引入了懲罰項,因此無須再重新初始化,但是其最大的缺點是計算量大、演化收斂緩慢、效率低下。在LBF模型和高斯函數規則符號距離函數的基礎上,由ZHANG K H等人提出LIF(Local Image Fiting)模型[3],LIF模型修改了活動輪廓模型的能量函數,并將LBF模型中用高斯函數求零水平集曲線內外局部灰度高斯加權均值改為直接求曲線內外灰度均值,效率相比LBF模型有所提高,但其效率仍然無法滿足本系統小于1 s的計數速度,且對初始輪廓敏感,對非高斯噪聲圖區并不理想,基于閾值的晶圓目標提取在速度以及精準度方面都存在不足。
通過分析整個晶圓采集圖像具有背景單一、目標集中的基本構圖特征[4-6],將晶圓圖像分為邊界、背景和目標區域三部分。目標區域一般位于圖像的視角聚焦的中心位置,目標完全不與邊界相接觸,直接采用邊界優先策略,將圖像邊緣當作背景來處理,通過區域間特征線索的關聯度來判斷區域與邊界的連接度,識別出目標或背景區域。
這里關鍵是首先要確定邊界區域,然后通過特征線索按照邊界優先的原則來劃分背景和目標區域。ZHU W在文獻[7]中只簡單將圖像4個邊緣定量的行列區域人為劃分為邊界區域。當目標與邊界有接觸或接近邊界區域時,存在將目標誤判為邊界區域的概率,直接影響到后續對背景與目標的準確劃分。
這里采用VAN DE WEIJER J文獻[8]中的Harris檢測算法,檢測圖像中晶圓目標的角點與輪廓角點,晶圓目標包含在一個凸多邊形內,整個晶圓圖像被劃分為包含目標對象的內部區域和外部區域,角點檢測結果如圖2所示,整個晶圓目標包含在角點所包絡的區域中。
整個邊界區域則在外部區域中劃分,以角點到邊緣的平均垂直距離為基準值為寬度,來劃分4個方向上的邊界區域,作為后續背景和目標分割的基礎,避免誤將目標盲目劃分為邊界區域。
2.1 邊界連接度優先晶圓顯著性算法
依據晶圓圖像目標居中,與邊界大面積接觸的則是背景區域的特點,通過邊界連接度來表示這一特性,依據這一特性來識別晶圓目標。這里定義像素區域的邊界連接度為該點的邊界外圍長度與其總長度的比率,具體計算如下:
2.2 晶圓目標顯著性提取
在充分考慮晶圓圖像空間布局基礎上,這里同時應用圖像空間上的特征,將顏色與空間信息同時融合來提取晶圓顯著性目標,目標顯著性定義為:
依據式(3),晶粒區域從背景區域中接收到較大的值 對比度加強;與此相反,背景區域從目標區域中接收小的值
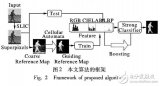
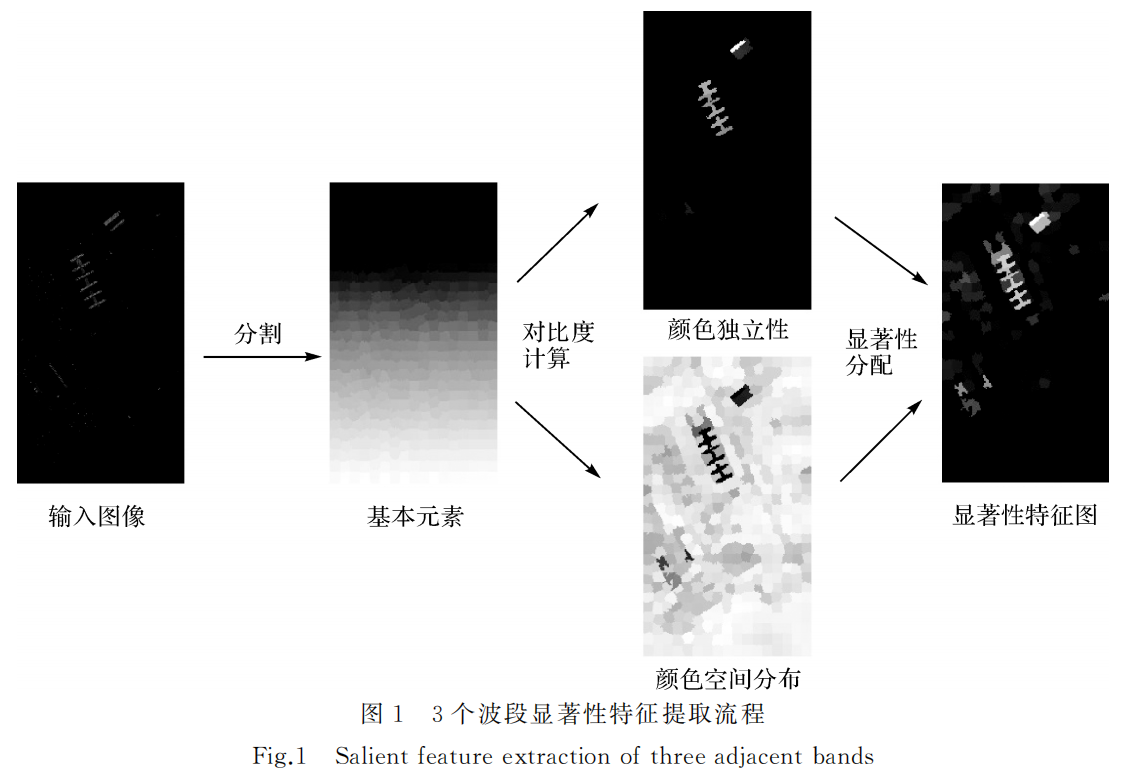
對比度加強;與此相反,背景區域從目標區域中接收小的值 對比度降低。這種非對稱的行為加強了目標與背景區域的對比度。整個算法流程如圖3所示。
對比度降低。這種非對稱的行為加強了目標與背景區域的對比度。整個算法流程如圖3所示。
在晶圓目標提取中,為避免大規模數值計算,提高顯著性檢測的速度,滿足實時性的要求,將計算處理的基本圖像單元分割為不同的塊[9-10]。使用SLIC[10]方法將圖像抽象為一組大致固定的超像素點,超像素保存了局部結構的同時減少了不必要的細節信息,利用文獻[11]算法來計算超像素結點構成的稀疏圖中任意兩點間的最短距離,僅需要0.047 s,時間復雜度只有O(n)。超像素劃分結果如圖4所示。通過計算超像素點的顯著性來提取晶圓目標。
3 試驗結果分析
通過對分辨率為4 000×3 000的彩色晶圓圖像、運用邊界連接度優先的目標提取算法進行實驗。其實驗環境為IntelCore i3-3240 3.40 GHz,RAM 8 GB,VC2010。實驗中,在對圖像歸一化[0,1]基礎上,將邊界區域中前50行、值低于0.57的像素劃分為邊界點。超像素點設置為200個,對原始晶圓圖4(a)進行目標提取,結果如圖5(b)所示。圖5(a)中是LIF閾值二值化提取結果,受識別背景區域的噪音干擾,嚴重降低了目標提取的精確度。
為客觀驗證評價晶圓目標提取的有效性,通過查準率-查全率曲線PR來定量分析,其中查準率表示像素被正確標注為顯著性像素的比率,而查全率表示像素被標注為顯著性像素與實際顯著性像素的比率。其實驗數據集來自應用最廣泛的基準數據集ASD[10],相應的顯著性目標檢測結果如圖6所示,可檢測到較清晰的顯著性目標。相應的查準率-查全率PR曲線如圖7所示,相比較當前廣泛應用的閾值化中LIF檢測算法,其查準率有明顯的提高,同時整個晶圓目標提取的時間控制在0.26 s內,目標提取效率較高。
4 結論
本文利用機器視覺中的邊界優先提取顯著性目標算法設計晶圓目標提取系統。采用反饋式光源采集系統,在此基礎上,得到有利于該算法實施的亮度一致的圖像,可完整識別出整個晶粒包絡的區域,同時可有效排除識別區外的噪音干擾,滿足了系統對精度速度的要求。
-
led
+關注
關注
241文章
23136瀏覽量
658461 -
晶圓
+關注
關注
52文章
4842瀏覽量
127799
發布評論請先 登錄
相關推薦
基于低級特征圖最優融合的顯著性目標檢測

視覺顯著性預測防研究總結(AUC、NSS、EMD評估)

結合顯著性檢測與詞袋模型的目標識別方法

基于引導Boosting算法檢測顯著性
視覺顯著性目標分割提取
基于顯著性特征進行密度修正的均值漂移分割算法
視覺顯著性的快速區域立體匹配算法
基于視覺顯著性圖對象檢測算法
基于顯著性檢測的圖像分類算法
基于顯著性語義區域加權的圖像檢索算法
基于全時序CNN的視頻顯著性檢測方法
基于圖像顯著性識別的自動摳圖系統設計
基于音高顯著性增強的主旋律提取方法綜述
高光譜影像顯著性特征提取方法





 工商網監
工商網監
評論