") FPGA的瓶頸被突破,雙目的大規(guī)模應用即將到來!
FPGA的瓶頸被突破,雙目的大規(guī)模應用即將到來!
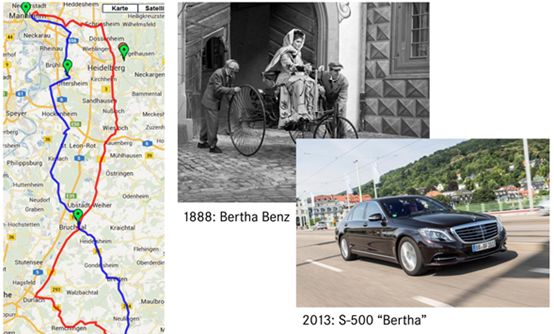
在1888年8月,奔馳創(chuàng)始人卡爾奔馳的妻子Bertha Benz開著丈夫發(fā)明的三輪內(nèi)燃汽車從德國Mannheim到達Pforzheim,這次大約100公里的歷程標志著現(xiàn)代汽車的誕生。
125年后,2013年8月,奔馳沿著當年的路程,又走了一遍,不過這次是無人駕駛,為了向前輩以及前輩的賢內(nèi)助致敬,奔馳將這輛基本沒改裝過的奔馳S500親切地稱之為Bertha。
Bertha的核心傳感器是一個1024*440像素的FOV為45度的雙目,奔馳將雙目基線長加大到35厘米,主要為了覆蓋更遠的距離,標準版S級雙目為30厘米。雙目的SGM和棒狀像素計算都使用FPGA完成,每幀圖像可以做到40萬個獨立深度測量。剩下的計算奔馳用一個FOV為90度的單目識別紅綠燈,用一個FOV為90度的單目做基于特征的輔助定位。另外還有4個120度的中距離毫米波雷達,KIT提供了高精度地圖,地圖包括限速、斑馬線位置、停止線、道路曲率等。由于是郊區(qū)行駛,奔馳只用了GPS,并未用外置慣性導航系統(tǒng)。這也是最接近量產(chǎn)的L4級無人車。
雙目相比單目有著壓倒性的絕對優(yōu)勢,單目能做到的,雙目都能做到,單目卻做不到雙目的3D立體視覺。以紅綠燈檢測為例,Mobileye闖紅燈的視頻想必大家都看過了,識別紅綠燈是感知環(huán)節(jié)最難的技術(shù)點之一,百度和谷歌都是利用各自擁有的街景圖片庫資源,利用先驗信息,設定好ROI,以此提高識別紅綠燈的準確率。然而街景的更新速度很慢,在快速發(fā)展的中國或許不合適,在美國就比較合適。即便如此,Waymo也出現(xiàn)過闖紅燈的視頻,如果沒有街景配合,單純單目的紅綠燈識別率相當?shù)汀8旅氖牵覈募t綠燈千奇百怪,尤其是天津,一條路上有五種紅綠燈,簡直是無人車的噩夢。而V2X還遙遙無期。
目前有三種雙目識別紅綠燈方法,第一種是用目標候選區(qū)濾波法,在目標候選區(qū)分析視差值,將前景與背景分離,無需先驗知識。
第二種是關聯(lián)位置濾波法,這種方法需要先驗知識,就是統(tǒng)計紅綠燈的3維位置信息,特別是紅綠燈的高度,還有與斑馬線的直線距離,與路沿的直線距離。當無人車上線行駛時可以獲得目標的三維距離信息,與先驗知識庫做濾波。這種方法可以大幅度提高紅綠燈識別率。有時只需要紅綠燈的高度信息,相對街景,這個先驗知識可以輕松獲得。
第三種方法,即再投影法。將真實世界的紅綠燈建模,同時增加深度測量數(shù)據(jù),將紅綠燈假想再投影到紅綠燈模型內(nèi),再配合深度測量數(shù)據(jù)判斷是不是紅綠燈。無論那一種,都要比單目好得多。
雙目的立體匹配幾乎都要用FPGA完成,懂算法又懂FPGA的人才非常罕見,F(xiàn)PGA價格也比較高,這限制了雙目的應用。加上FPGA廠家都位于美國,中國企業(yè)對此是有所顧慮的。美國對FPGA的銷售是睜一只眼閉一只眼,一旦較真起來,很可能買不到計算單元超過10萬的FPGA。單目的應用幾乎不用考慮硬件,價格低廉,因此應用遠比雙目廣泛。
不過這種現(xiàn)象將在未來幾年有大幅度改觀。全球前三大汽車處理器廠家的兩大都推出了專用雙目設計的處理器,這就是瑞薩的R-CAR V3H和NXP的S32V3系列。兩者都是在2018年3季度有樣片。雙目可以不用FPGA了。
先來看瑞薩的R-CARV3H。

R-CAR V3H目前已確定獲得日產(chǎn)和豐田的訂單,日產(chǎn)將全線使用R-CAR V3H,包括高速公路自動駕駛,遙控泊車,全自動泊車,塞車輔助,無限制條件的AEB(L2階段的限制條件極多)。

R-CAR V3H的運算能力達到4.2TFLOPS,超過Mobileye EyeQ4的3TFLOPS,制造工藝上R-CAR V3H擁有絕對優(yōu)勢,臺積電的16納米FinFET工藝完勝意法半導體的28納米FD-SOI工藝。當然Mobileye EyeQ4比R-CAR V3H要早兩年,但R-CAR V3H還有強大的CPU系統(tǒng),包含4個A53和一個擁有鎖步功能的R7,這就意味著R-CAR V3H應該能滿足ISO 26262 ASIL-A或B級標準而不是Mobileye那樣只能通過AECQ-100 1級標準。
上圖為R-CAR V3H的內(nèi)部框架圖
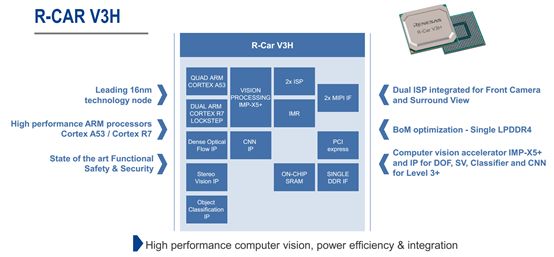
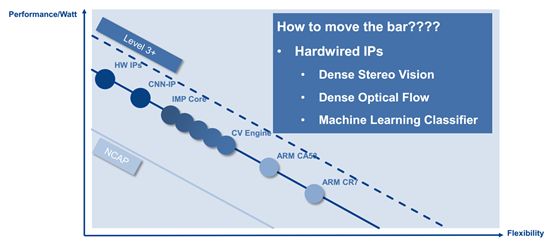
R-CAR V3H針對L3+級車輛,包含了立體視差和光流硬核IP,效率與FPGA相當,或許比FPGA略好。
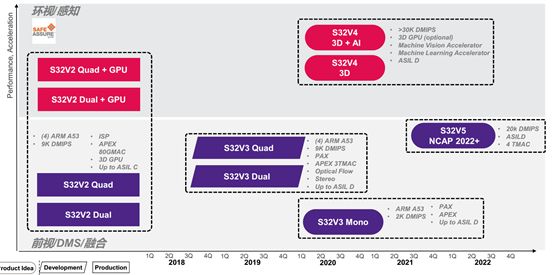
NXP計劃在2018年3季度推出S32V3的樣片,和V3H一樣也是立體視差和光流硬核IP。
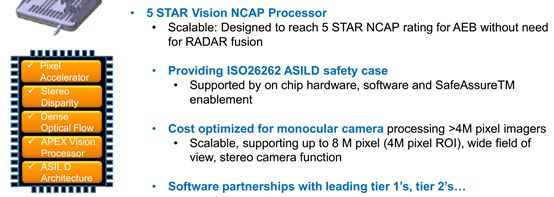
S32V3最高可達ASIL-D級,安全等級遠超Mobileye。
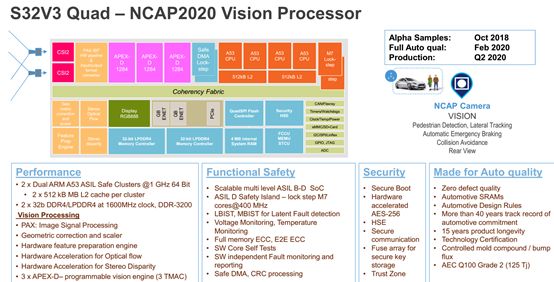
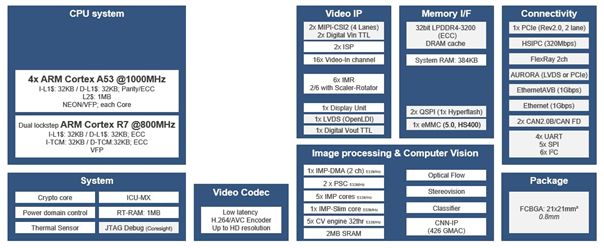
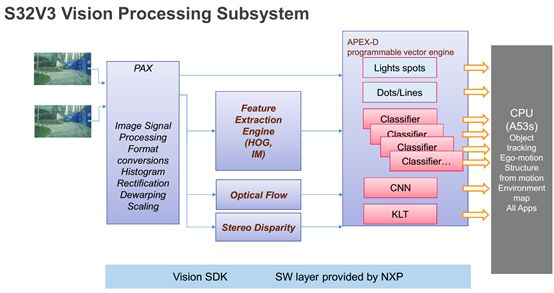
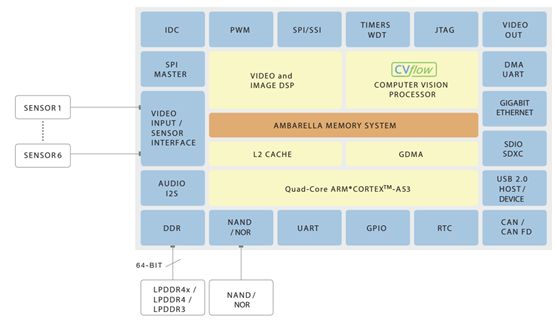
S32V3內(nèi)部框架圖
除了NXP和瑞薩這兩家頂級企業(yè),還有行車記錄儀芯片巨頭安霸的產(chǎn)品,運算性能比Mobileye即將在2018年3季度問世的EyeQ5還要強。安霸在2015年以3000萬美元的價格收購了意大利初創(chuàng)公司VisLab,這家公司由意大利帕爾馬大學團隊創(chuàng)立。目前,其創(chuàng)始人Alberto Broggi教授擔任安霸自動駕駛業(yè)務的負責人。
安霸第一代自動駕駛用芯片CV1能夠?qū)獌蓚€800萬像素的雙目立體視覺,運算力達到2TFLOPS。采用索尼的IMX317圖像傳感器,像素精度可達3840*1728,如此高的像素,即使在FOV為75度30厘米基線的情況下也可以達到300米的有效距離,遠超大部分激光雷達的有效距離。
激光雷達的有效距離與物體反射率關系極為密切,通常廠家只給反射率為80%時的有效距離,對于白色車輛,反射率可能只有10%,有效距離會縮短到80%時的1/3甚至更少。一般MEMS激光雷達在10%反射率下有效距離只有30到70米,機械旋轉(zhuǎn)型的略好。
CV1可以直接輸出一張視差圖,幀率每秒一幀。同時還內(nèi)含路障或隔離柵檢測,路沿與車道線檢測,交通信號檢測,一般障礙物檢測。
CV1只是安霸試水作品,安霸在2018年初推出CV2AQ,運算性能提高10倍,大約為14TFLOPS,三星的10納米工藝制造,通過了AEC-Q100 2級標準。
這款芯片異常強大,可以同時處理3200萬像素的數(shù)據(jù),可以同時對應6個雙目,包括兩個800萬像素的雙目和4個200萬像素的雙目。而CV1僅能對應1個800萬像素的單目。
隨著FPGA的瓶頸被突破,雙目的大規(guī)模應用即將到來!
-
FPGA
+關注
關注
1626文章
21665瀏覽量
601828 -
立體視覺
+關注
關注
0文章
36瀏覽量
9772 -
無人駕駛
+關注
關注
98文章
4029瀏覽量
120297
原文標題:突破FPGA限制,雙目立體視覺時代即將到來
文章出處:【微信號:zuosiqiche,微信公眾號:佐思汽車研究】歡迎添加關注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關推薦
Veloce平臺在大規(guī)模SOC仿真驗證中的應用
FPGA系統(tǒng)功耗瓶頸的突破
大規(guī)模MIMO的利弊
真正虛擬化的測控時代即將到來
恩智浦的無線連接主要體現(xiàn)在哪幾個方面?
解讀全球十大公司物聯(lián)網(wǎng)戰(zhàn)略,一個萬物智能的世界即將到來 精選資料分享
大規(guī)模FPGA設計中的多點綜合技術(shù)

即將到來的iPhone8將是平面屏幕,而非曲面屏幕
5G即將到來 將面臨這些問題

2020年即將到來,關于Linux和開源給出的五個預測
小米“雙面屏”新設計曝光 暗示有望在即將到來的設備上采用
無人機送貨的“人在家中坐,貨從天上來”場景或即將到來
能量收集和物聯(lián)網(wǎng)發(fā)展的轉(zhuǎn)折點即將到來






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論