") 一種基于區(qū)域生長法與水平集相融合的肺部CT圖像的分割
一種基于區(qū)域生長法與水平集相融合的肺部CT圖像的分割
摘要:
為將肺實質(zhì)區(qū)域從含有背景、噪聲的胸腔區(qū)域里分割出來,首先,應用傳統(tǒng)的區(qū)域生長法初步定位肺部邊界輪廓;其次,去除肺部邊界噪聲,采用自適應曲率閾值法修復肺部邊界;最后,應用水平集法中的DRLSE模型精確地分割出肺部區(qū)域。融合兩種方法分割肺部區(qū)域,有效防止了圖像邊緣的漏檢,可處理多種類型病變的肺部圖像。在隨機抽取的150例圖像中,分割的準確率達到96.9%,分割一幅圖像花費的時間約為0.72 s,具有很強的魯棒性和較高的分割精度。本算法能精確完整地分割出肺部區(qū)域并保留了肺區(qū)內(nèi)的細節(jié)信息。
0 引言
隨著大氣環(huán)境的不斷惡化,肺部疾病的發(fā)病率逐年提高。據(jù)統(tǒng)計數(shù)字表明,肺癌占癌癥患者的比率高達21%,死亡率也居高不下。臨床發(fā)現(xiàn),早期肺癌的治愈率高達90%以上,及早發(fā)現(xiàn)肺部異常情況可以控制病情,降低死亡率。目前,主要通過觀察肺部CT序列圖像來尋找病灶信息,精確地分割出肺部區(qū)域是定位腫瘤的關(guān)鍵前提條件。針對肺部區(qū)域的分割,國內(nèi)外專家學者主要從閾值法、區(qū)域法、遺傳法、水平集法及人工神經(jīng)網(wǎng)絡等來實現(xiàn)。
閾值法是最常用和簡單的一種分割方法,原理是繪制圖像的灰度直方圖,通過選取直方圖中的閾值,對圖像進行分類,得到分割結(jié)果。文獻[1]中,郭圣文等提出首先應用自適應閾值法二值化肺部區(qū)域圖像,然后應用特征分類器精確地分割出肺部區(qū)域。閾值法要求圖像的灰度值要均勻分布,直方圖里能明顯地觀察到峰谷,否則就不能準確地分割指定區(qū)域,局限性比較大。文獻[2]中,Gao Guorong等提出區(qū)域生長法分割肺部區(qū)域,根據(jù)設定的種子點,準確地剔除掉粘連肺部的氣管及血管等高密度信息,但需要人工選取種子點,誤差比較大,實際應用中需結(jié)合其他算法分割結(jié)果更好。文獻[3]中,秦曉紅等提出利用遺傳算法中的全局尋優(yōu)能力策略實現(xiàn)肺部區(qū)域的分割,該算法能使分割簡化,并提高搜索范圍,但是需要提供大量的訓練樣本,提取特征也需要花費大量的時間,收斂速度也比較慢,實用性不高。文獻[4]-[5]中,魏穎等人應用幾何主動輪廓模型(Geometric Active Contour,CAC)中的C-V水平集方法來分割肺部區(qū)域,并結(jié)合肺部結(jié)構(gòu)特征改進了C-V方法,肺部邊界分割的精度和準確度都有提高。
與傳統(tǒng)的GAC模型相比,該方法的分割精度更高,收斂速度更快,也有效防止了邊緣的漏損。綜上所述,主動輪廓模型發(fā)展起來的水平集方法的分割性能比較好,算法復雜度也低,也可處理復雜的圖像。因此,本文把傳統(tǒng)的分割方法與現(xiàn)代的分割方法進行優(yōu)化組合,提出一種基于區(qū)域生長法與水平集相融合的肺部CT圖像的分割。首先采用自適應閾值法對肺部CT圖像進行二值化處理,然后應用區(qū)域生長法對肺部區(qū)域進行粗分割[6]。最后運用水平集方法中的幾何活動輪廓模型實現(xiàn)精確分割,在MATLAB軟件平臺進行仿真測試后,實驗結(jié)果表明,在肺部CT圖像的分割中應用本文的方法取得了較好的分割效果。
1 算法原理
1.1 閾值法原理
閾值法[7]是一種區(qū)域分割技術(shù),把灰度值分成兩個或者更多的灰度區(qū)間,選擇一個或者多個合適的閾值,根據(jù)目標和背景的差異,判斷區(qū)域是否滿足閾值要求,把背景和目標分開產(chǎn)生二值圖像。閾值處理有兩種形式:全局閾值和自適應閾值。全局閾值只設定一個閾值,自適應閾值設定多個閾值,通過灰度直方圖的峰谷處確定閾值來分割目標和背景區(qū)域。
閾值選取得是否合適,決定圖像分割的好壞,本文選用自適應閾值法二值化肺部圖像。肺部區(qū)域結(jié)構(gòu)復雜,在不同的環(huán)境及條件下,圖像表現(xiàn)也各異,應用自適應閾值法,動態(tài)地選取多個閾值可以達到對肺部區(qū)域更好的二值化處理。
本文應用比較受歡迎的OSTU算法選取閾值。基本原理是:利用閾值把直方圖分為兩部分,當被分成的兩部分方差最大時,獲得最優(yōu)閾值[8]。自適應閾值法最終把DICOM格式的醫(yī)學CT圖像轉(zhuǎn)化為只有黑白色的二值圖像,以便于后期對圖像進行分割、提取、識別等處理。
1.2 區(qū)域生長法原理
區(qū)域生長法基本思想是:根據(jù)預先定義的生長準則來把像素或子區(qū)域合成較大區(qū)域的處理方法,基本處理方法是以一組“種子”點開始來形成生長區(qū)域,即將那些預定義屬性(如像素的灰度級或顏色)類似于種子點的鄰域像素附加到每個種子點上[9]。區(qū)域生長的關(guān)鍵問題是相似性準則的選擇和區(qū)域生長中停止規(guī)則的設定。準則可以通過圖像的亮度值、紋理、色彩的相似性設定,當不再有像素滿足該區(qū)域所包含的準則時,生長區(qū)域的過程就停止。基于區(qū)域生長的分割方法計算簡單,可實現(xiàn)肺部區(qū)域的初始分割,獲得區(qū)域的初始輪廓信息。
1.3 水平集法原理
水平集方法是主動輪廓模型(Active Contour,AC)中的幾何主動輪廓模型(Geomet Active Contour,GAC),是近幾年發(fā)展起來的一種圖像分割方法。水平集法進行圖像分割的基本思想是[10]:通過曲線運動的不斷演化一直尋找圖像的邊界,直到找到目標輪廓,停止移動曲線。曲線需要沿著CT圖像的每一個三維切面層移動,對不同層次的三維曲面切取薄片,獲得每一層的封閉曲線,隨著時間的推移,改變水平級,最終得到一個相應的形狀提取輪廓。
常用的水平級模型有3種,MS(Mumford-shah)模型、CV(Chan-Vese)模型、DRLSE(Distance Regularized Level Set Evolution)模型[11],前兩類模型是傳統(tǒng)的水平集模型,都是利用區(qū)域統(tǒng)計量進行分割,克服了利用梯度(邊緣)信息導致弱邊緣漏檢、多噪聲敏感等問題。但是尋找近似區(qū)域需要不斷地初始化水平集函數(shù),仍然具有計算效率低和實現(xiàn)困難等問題。DRLSE模型對傳統(tǒng)的方法做出了改進,即在水平集函數(shù)里增加一個約束項,避免了水平集函數(shù)周期性地初始化,提高了收斂速度,減化了運行時間。根據(jù)以上模型的分析,本文選用DRLSE模型來提取肺部輪廓區(qū)域。
2 區(qū)域生長和水平集相融合的肺部CT圖像的分割
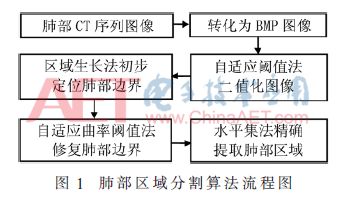
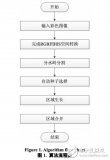
在得到DICOM格式的CT圖像后,本文的工作是把完整的肺實質(zhì)區(qū)域精確地分割出來,便于后續(xù)對肺部疾病的診斷和定量的數(shù)據(jù)分析。肺部區(qū)域的分割分為4部分:圖像二值化、區(qū)域生長法初步定位肺部邊界區(qū)域、肺部邊界的修補、水平集法精確提取肺部區(qū)域輪廓。圖1給出分割肺部區(qū)域算法的流程圖。
2.1 圖像預處理
采集后的DICOM格式圖像不能在計算機屏幕上顯示,必須要轉(zhuǎn)換成BMP格式,由于兩種圖像格式的存儲方式不同,本文應用垂直鏡像變換進行格式轉(zhuǎn)換。醫(yī)學圖像垂直鏡像公式表示為:

其中,G0(-n0,k0)表示DICOM格式原始圖像I0中像素點(-n0,k0)的像素值,Gvm(n0,k0)表示垂直鏡像后BMP格式圖像Ivm中像素點的像素值。
2.2 OSTU法圖像二值化
OSTU方法是一種自動化閾值分割方法,根據(jù)閾值把圖像區(qū)域分為兩組,當被分成的兩個區(qū)域方差達到最大時,用得到最佳分割閾值來對圖像進行分割。它屬于單閾值分割,將圖像分為背景和目標兩類,經(jīng)過處理后,灰度圖像轉(zhuǎn)換成只有黑白兩色的圖像。處理的步驟如下所示:
(1)讀取肺部CT圖像,轉(zhuǎn)成BMP格式的圖像。
(2)應用MATLAB軟件工具箱中的imhist函數(shù)繪制圖像的灰度直方圖,公式為:

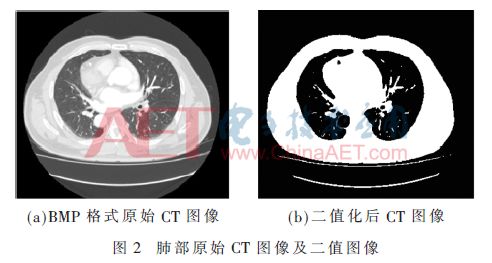
其中,I為原始圖像,n為灰度級,M為圖像I的灰度直方圖。根據(jù)肺部區(qū)域與周圍器官的灰度差異,使得直方圖中重疊區(qū)域最小,求出兩個區(qū)域的最大類間方差值,得到最佳分割閾值,根據(jù)閾值分割出肺部區(qū)域作為目標區(qū)域,其他區(qū)域作為背景區(qū)域,使用OSTU法二值化后的圖像如圖2所示。
2.3 區(qū)域生長法初步定位肺部邊界
二值化后的肺部CT圖像并沒有把肺實質(zhì)與圖像背景精確地分離開,肺實質(zhì)的邊緣信息還混淆在背景區(qū)域內(nèi),同時,肺實質(zhì)區(qū)域內(nèi)還包括一些氣管、空氣等一些噪聲,本文應用區(qū)域生長法初步定位肺部區(qū)域邊界并剔除噪聲等干擾信息。
區(qū)域生長法需要解決3個問題:(1)需要確定區(qū)域內(nèi)某個像素點作為生長種子點;(2)確定種子點的生長準則;(3)確定種子點在生長過程中終止條件。
2.3.1 肺部區(qū)域邊界的初步定位
定位肺部邊界算法的步驟如下所示:
(1)輸入二值化后的圖像,計算獲得圖像上X、Y軸方向的最大分辨率Amax、Bmax。
(2)選取目標區(qū)域R,計算該目標區(qū)域的灰度平均值Tm,設該區(qū)域內(nèi)有N像素,則該區(qū)域的灰度平均值為:
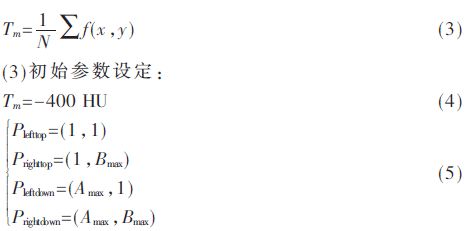
(4)種子點的選擇:從目標區(qū)域圖像的最左側(cè)出發(fā),設定四鄰域模板,掃描周圍像素點,如果像素點的灰度值小于Tm,即為種子點。
(5)設定區(qū)域生長準則T:其中I(Ai,Bi)為原始圖像的任意像素值,N4(Ai,Bi)是Ai、Bi的四鄰域像素點。用四鄰域像素點與灰度平均值進行比較。
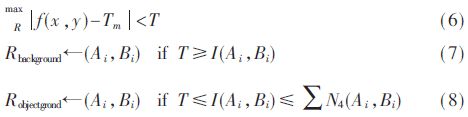
從左上到右下掃描目標區(qū)域,找出滿足式(6)~式(8)的所有像素點。
(6)把滿足準則的所有種子點周圍的四鄰域像素進行搜索,直到不滿足條件結(jié)束生長,分割完成。
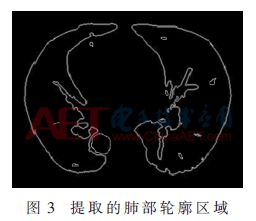
應用區(qū)域生長法可初步定位肺實質(zhì)輪廓區(qū)域,提取輪廓區(qū)域結(jié)果如圖3所示。
2.3.2 氣管去除
提取肺實質(zhì)外部氣管的算法思想是:設定種子點后,應用棋盤距離標記方法生成區(qū)域內(nèi)的像素,確定好棋盤間的距離K,經(jīng)過第N次迭代后,依據(jù)區(qū)域生長規(guī)則,搜索滿足條件的所有像素點,最后設置生長終止條件,檢測到氣管區(qū)域。設V(K)為滿足區(qū)域生長的面積值,繪制V(K)值的曲線變化圖,觀察曲線圖中值的變化,如果數(shù)值突然變大,表明檢測到管狀器官,提取并去掉該區(qū)域,具體步驟如下:
(1)種子點的選擇:從中肺野層片上開始搜索種子點,設定4×4模板,搜索所有滿足像素點的區(qū)域,利用區(qū)域生長法獲得種子點。
(2)生長規(guī)則:搜索種子點周圍四鄰域像素的值,保留T+4與T-4之間的像素值,搜索不少于100個像素的面積區(qū)域。
(3)終止條件:計算函數(shù)V(K)的面積導數(shù),如果面積導數(shù)值大于零,則停止搜索,提取氣管區(qū)域,獲得無干擾信息的肺實質(zhì)區(qū)域。
去除氣管的肺部輪廓區(qū)域如圖4所示。

2.4 肺部邊緣修復
大量的氣管、血管等都分布在肺部邊界,在去除氣管的同時,造成了邊界區(qū)域的凹凸不平,需要對邊緣進行修復,以獲得光滑、完整的肺實質(zhì)輪廓區(qū)域。
2.4.1 曲線平滑
修復肺部邊界之前,要對邊界進行平滑處理,否則無法準確自動地選取參數(shù)來計算曲線的曲率,對邊界進行精確的修復。
本文應用迭代采樣點算法對肺部輪廓曲線進行平滑處理。提取肺部輪廓區(qū)域,提取邊緣一系列點列{i},獲取系列點連接線的凹凸區(qū)域,對凹凸區(qū)域應用牛頓-柯特斯公式進行凹凸點的修整,經(jīng)過多次迭代,使得系列邊緣點近似服從線性關(guān)系,達到平滑邊緣的效果的過程。算法的實現(xiàn)步驟為:
(1)設步長λ=0.9,根據(jù)牛頓-柯特斯公式:

2.4.2 邊界修補
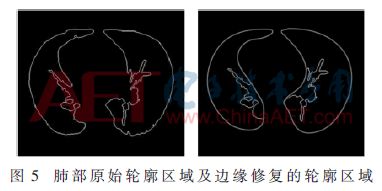
本文應用自適應曲率閾值法修復肺部邊界,經(jīng)過光滑后的邊緣可以準確地計算出點的曲率閾值,其中具有較大曲率值的凹點就是要待修補的靠近肺部邊緣的區(qū)域點。算法步驟如下:
(1)設點的曲率閾值為μ,邊界區(qū)域用P表示,計算區(qū)域點高度的平均值 ,設μ=
,設μ= ,采樣區(qū)域P的離散點。
,采樣區(qū)域P的離散點。
(2)計算區(qū)域P內(nèi)每個離散點i的高度,設為ωi,并找到所有凹點區(qū)域,如果ωi>μ,刪除i點,連接i點的鄰域點。
(3)重復步驟(1)、(2),直到搜索完邊界區(qū)域所有的點,區(qū)域長度和原長度一致為止。
最后,獲得光滑完整的肺部輪廓區(qū)域,對比修復前后的效果圖見圖5。
2.5 水平集法精確提取肺部區(qū)域
本文選用DRLSE模型來對肺部區(qū)域進行精確提取。該模型的優(yōu)點是在利用迭代方法尋找圖像中相匹配的點時無需重復初始化水平集函數(shù),提高了運算速度,減少數(shù)據(jù)計算量。其中水平集函數(shù)φ的數(shù)學公式表示為:
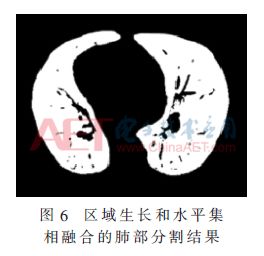
(3)重復步驟(2),不斷地迭代水平集函數(shù),直到達到滿意效果,i的值不超出300,停止迭代,獲得水平集迭代后的肺部邊界精確的輪廓區(qū)域,邊界曲線也得到較好的收斂,提取的最終的肺部區(qū)域圖像如圖6所示。
3 實驗結(jié)果
3.1 數(shù)據(jù)來源
為了驗證本方法的可行性和分割的精確性,從LIDC肺部圖像公開數(shù)據(jù)庫中隨機抽取120幅圖像,從包頭某醫(yī)院抽取30幅含有病變信息的圖像,每一幅圖像都配有專家分割的“金標準”,這也是評價算法好壞的重要準則。經(jīng)過篩選和鑒別大約有110幅圖像有肺部病變的跡象,90%以上肺部區(qū)域中左右肺是分離的,因此本文沒有提及左右肺分離。圖像的分辨率大約在0.6 mm~0.8 mm之間,大小為512×512,掃描層大約有30層。
3.2 實驗環(huán)境
本實驗的實驗平臺為:Windows 7操作系統(tǒng),i5處理器CPU,8 GB RAM,編程軟件為MATLAB R2015a、Visual Studio 2012。
3.3 結(jié)果與分析
為了驗證兩種方法融合后對圖像分割的可行性,再列出兩組不同肺部病變圖像的分割結(jié)果,如圖7所示。
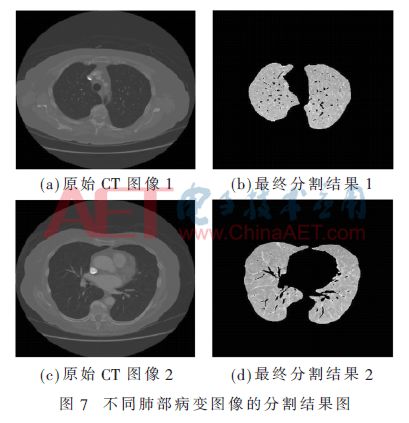
從分割結(jié)果可以看出,本文的方法能準確、完整地提取出肺實質(zhì)區(qū)域,克服了單獨使用區(qū)域生長法存在邊界漏檢等問題,結(jié)合后期的水平集法的精確分割,能清晰地觀察肺實質(zhì)內(nèi)部的細節(jié)信息和更精確地定位肺部邊緣信息,也避免了圖像的過分割等問題。同時,也可處理多種類型病變的肺部圖像,為后續(xù)圖像的進一步的分析和處理打下基礎。
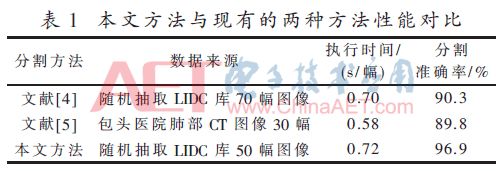
由表1可知,本文的算法是犧牲了時間,但提高了的分割精度。從分割結(jié)果可知,本算法有很強的可行性。本算法是計算機自動分割,時間和效率上依然比半自動或者手動分割的時效性高。
4 結(jié)論
肺部圖像的分割是計算機輔助臨床醫(yī)生檢測肺部疾病的前提條件,分割結(jié)果的好壞直接影響對疾病檢測的準確率等。本文提出一種區(qū)域生長與水平集相融合的肺部分割方法。經(jīng)過仿真實驗,該算法能有效、準確地分割出肺部區(qū)域,而且保留了肺內(nèi)部的細節(jié)信息,對后續(xù)肺結(jié)節(jié)的檢測和提取奠定了基礎。
本文的算法也存在不足,沒有對左右肺粘連情況的肺部區(qū)域進行分割,在抽選的圖片中,剔除了兩幅左右肺有粘連的圖片。后續(xù)將開展針對左右肺粘連區(qū)域分割的研究。同時,也可以把本算法應用于肺結(jié)節(jié)、胸膜結(jié)節(jié)的分割,來測試該方法的通用性,對分割出現(xiàn)的問題提出改進、優(yōu)化等。
-
神經(jīng)網(wǎng)絡
+關(guān)注
關(guān)注
42文章
4765瀏覽量
100566 -
圖像
+關(guān)注
關(guān)注
2文章
1083瀏覽量
40418 -
閾值
+關(guān)注
關(guān)注
0文章
123瀏覽量
18475
原文標題:【學術(shù)論文】區(qū)域生長和水平集相融合的肺部CT圖像分割
文章出處:【微信號:ChinaAET,微信公眾號:電子技術(shù)應用ChinaAET】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
水平集方法在肝臟CT圖像分割中的應用
一種全局穩(wěn)態(tài)最小水平集分割方法

基于紋理幾何結(jié)構(gòu)的紋理描述圖像分割

一種新的彩色圖像分割算法
基于水平集的牙齒CT圖像分割技術(shù)

基于Gabor與水平集的手指靜脈圖像分割

變分水平集的圖像分割
如何對肺部CT圖像的結(jié)節(jié)點提取算法的研究與分析詳細資料概述
一種編碼解碼模式的肺分割算法

一種高精度的肝臟圖像自動分割算法
基于變分水平集模型的多相圖像分割

肺部CT圖像的結(jié)節(jié)點提取算法的研究與分析






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論