") 自動駕駛Intel Inside時代來臨?
自動駕駛Intel Inside時代來臨?
英特爾變了。從PC Intel Inside到自動駕駛Intel Inside,現(xiàn)在的它更像是一個自動駕駛與智能網(wǎng)聯(lián)汽車推手,中國,成英特爾策源地。
5月30日,英特爾宣布成立英特爾智能網(wǎng)聯(lián)汽車大學(xué)合作研究中心(ICRI-IACV,Intel Collaborative Research Institute on Intelligent and Automated Connected Vehicles),面向自動駕駛展開深入研究,加速技術(shù)的落地,同時,英特爾與清華大學(xué)、中國科學(xué)院自動化研究所簽署合作協(xié)議,共同推動自動駕駛汽車相關(guān)課題的研究,為中國自動駕駛、智能網(wǎng)聯(lián)汽車產(chǎn)業(yè)的研發(fā)創(chuàng)新提供強(qiáng)有力的技術(shù)支撐。
這是英特爾智能網(wǎng)聯(lián)汽車大學(xué)合作研究中心推出的首項合作計劃,根據(jù)合作協(xié)議,各方將圍繞創(chuàng)新性的車聯(lián)網(wǎng)應(yīng)用以及平行駕駛等領(lǐng)域展開聯(lián)合研究。
英特爾智能網(wǎng)聯(lián)汽車大學(xué)合作研究中心由英特爾研究院發(fā)起建立,是英特爾大學(xué)聯(lián)合研究中心的重要組成部分,并與全球最優(yōu)秀的大學(xué)和科研機(jī)構(gòu)合作,針對關(guān)鍵的前沿技術(shù)領(lǐng)域展開持續(xù)的研究。
目前,針對可視計算中心、移動網(wǎng)絡(luò)通信中心等不同的研究領(lǐng)域,ICRI已在美國、中國、歐洲等國家和地區(qū)設(shè)立了多個研究分支,引領(lǐng)全球前沿科技的創(chuàng)新。
為了支持中國智能網(wǎng)聯(lián)汽車的創(chuàng)新發(fā)展,英特爾智能網(wǎng)聯(lián)汽車大學(xué)合作研究中心提出五大研究方向:
1)自動駕駛汽車安全性;
2)自動駕駛的人機(jī)接口,以及新配套法律法規(guī)帶來的挑戰(zhàn);
3)開放數(shù)據(jù)集以及基準(zhǔn)測試;
4)基于蜂窩無線網(wǎng)絡(luò)的車聯(lián)網(wǎng)(C-V2X)、移動邊緣計算、智慧交通以及智慧基礎(chǔ)設(shè)施研究;
5)基于新型硬件器件和架構(gòu)(例如英特爾3D Xpoint)的先進(jìn)算法研究。
分析來看,五大研究方向涵蓋了自動駕駛汽車、車聯(lián)網(wǎng)技術(shù)以及支撐自動駕駛的大規(guī)模智能基礎(chǔ)設(shè)施。
在自動駕駛汽車層面,英特爾、Mobileye、德爾福、寶馬已形成自動駕駛聯(lián)盟,四家合作伙伴將更廣泛地與汽車行業(yè)及其它潛在行業(yè)交付并拓展已開發(fā)的解決方案。
在車聯(lián)網(wǎng)層面,英特爾與東軟、哈曼、長安等多家企業(yè)達(dá)成合作,從打造下一代智能駕駛艙為切入點(diǎn),在車聯(lián)網(wǎng)、人工智能等領(lǐng)域進(jìn)行探索,提升用戶體驗。
在智能基礎(chǔ)設(shè)施層面,英特爾積極布局5G技術(shù),聯(lián)手中國移動、中國電信等通訊運(yùn)營商開展5G試驗,加速網(wǎng)絡(luò)轉(zhuǎn)型,聯(lián)手華為、中興、愛立信等通訊設(shè)備制造商,加速試驗測試共同演示驗證。
幾乎沒有企業(yè)做到布局如此完善。
英特爾公司高級副總裁、首席技術(shù)官兼英特爾研究院院長Michael Mayberry表示:“非常高興與清華大學(xué)、中科院自動化研究所這樣中國頂尖的大學(xué)、研究機(jī)構(gòu)展開合作。基于三方對于前瞻性技術(shù)的研究與洞察,我們相信此次合作將為中國自動駕駛產(chǎn)業(yè)奠定強(qiáng)大的技術(shù)基石,作為英特爾的科技創(chuàng)新引擎,英特爾研究院致力于推動影響未來的前瞻性技術(shù)研發(fā)。從人工智能、自動駕駛、5G,到量子計算、神經(jīng)擬態(tài)計算、概率計算等,我們始終位列全球技術(shù)發(fā)展的最前沿。未來,我們將繼續(xù)引領(lǐng)并定義技術(shù)變革之路。”
英特爾無人駕駛解決方案資深首席工程師、首席系統(tǒng)架構(gòu)師Jack Weast表示:“隨著智能網(wǎng)聯(lián)汽車將要以百萬的量級在全世界的路面上部署的時候,安全的問題就變得越來越重要。但同時我們又發(fā)覺,目前汽車業(yè)界對這個問題驗證的方法是不能從根本上解決這個問題的。”
不難看出這一系列布局背后,英特爾成立智能網(wǎng)聯(lián)汽車大學(xué)合作研究中心后將會把自動駕駛安全研究放在第一位。
最近,Mobileye開發(fā)了一個名為RSS(Responsibility Sensitive Safety)的責(zé)任敏感安全模型,以期通過數(shù)學(xué)的方式來界定“安全狀態(tài)”。
其目標(biāo)是通過一些數(shù)學(xué)公式從理論上來保證自動駕駛汽車的安全行駛,并通過形式化以下人類駕駛中比較具有主觀性的幾個常識確保自動駕駛汽車永遠(yuǎn)不會主動導(dǎo)致事故發(fā)生。
Jack Weast對《AutoR智駕》表示:“為什么我們今天會和中國這兩家大學(xué)研究機(jī)構(gòu)之間成立合作研究中心,也是因為我們覺得RSS確實(shí)需要完善,在加州做路測,其實(shí)路況還是要好得多,但是在中國這樣一種更加高級復(fù)雜化的路況之下做路測,使得RSS的安全場景更全面,一般來說,我們必須達(dá)到自動駕駛的三級以上,三到四級,這個時間點(diǎn)是2020年左右,但從現(xiàn)在到2021年之間,RSS還需要做大量的路測。”
根據(jù)英特爾中國研究院介紹,RSS模型要達(dá)到的目標(biāo)具有兩重含義(以下內(nèi)容來自英特爾中國研究院):
1)自動駕駛汽車本身不會導(dǎo)致事故(卷入事故和導(dǎo)致事故是完全不同的概念,如上文提到的例子,自動駕駛汽車可能卷入事故,但它不是事故的責(zé)任方)。2)自動駕駛汽車應(yīng)該在其它車輛發(fā)生錯誤時做出正確反應(yīng)。
也就是說RSS要做的就是在事故發(fā)生前設(shè)定游戲規(guī)則,主要用于自動駕駛系統(tǒng)中的決策部分,可以讓其它OEM廠家將此模型直接放入他們的決策系統(tǒng),從而促進(jìn)行業(yè)標(biāo)準(zhǔn),提高自動駕駛的整體安全。
4個“常識”判斷責(zé)任方
對此,RSS通過形式化以下4個“常識”規(guī)則來確定“誰需要對事故負(fù)責(zé)”:
1)追尾不是前車的責(zé)任,后車必須保持足夠的安全距離。
2)除非前車突然并線,紅車突然插入黃車的車道導(dǎo)致追尾,責(zé)任在紅車。3)不要刻板地使用“路權(quán)”(“right-of-way” is given not taken)。如果某輛汽車違反了交通規(guī)則進(jìn)入自動駕駛汽車擁有路權(quán)的道路,但自動駕駛汽車有足夠的時間剎車避免事故,則它必須剎車,而不能由于自己的路權(quán)高而向前沖,否則就要承擔(dān)責(zé)任。4)小心被遮擋區(qū)域,小孩可能會被前車遮擋。
RSS是形式模型,需符合以下標(biāo)準(zhǔn):
合理性:當(dāng)RSS模型認(rèn)為事故中自動駕駛汽車沒有責(zé)任時,它必須符合人類判斷的常識。
實(shí)用性:我們可以制定出一些不會導(dǎo)致事故的駕駛規(guī)則,即便事故發(fā)生,也可以明確不是自動駕駛車輛的責(zé)任。比較極端的做法是車輛一旦遇到意外情況就立刻停止,但是這種車是沒用的,我們必須保證道路的通行能力。
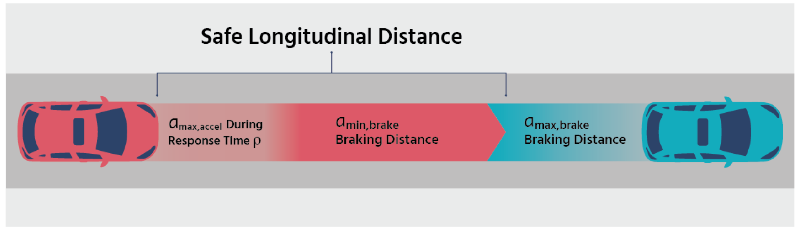
什么是安全距離
安全距離是指在最惡劣的情況下仍可以避免碰撞的距離。最惡劣的情況是指前車以最大剎車加速度開始剎車,后車發(fā)現(xiàn)后有一定的反應(yīng)時間,并在反應(yīng)時間內(nèi)仍以最大加速度前進(jìn),然后改成以最小剎車加速度剎車,直到危險解除。因此,最小安全距離的計算公式如下:

參數(shù):Vf前車速度,Vr后車速度,反應(yīng)時間ρ、最小剎車加速度αmin,brake、最大剎車加速度αmax,brake以及最大加速度αmax,accel。
說明:
*上述公式中的參數(shù)應(yīng)該是法規(guī)制定的合理值
1)人類駕駛汽車和自動駕駛汽車的參數(shù)可以不同。比如自動駕駛汽車的反應(yīng)時間一般會比人類短,而且自動駕駛汽車可以比人類駕車的剎車更有效。因此,自動駕駛汽車的αmin、brake可以設(shè)置得更大些。
2)不同路況下可以設(shè)置不同的參數(shù)(濕滑路面、冰、雪等)。
相對行駛、橫向移動等情況都會涉及不同的安全距離的計算方式,這里不再贅述。
路權(quán)
多條道路交叉或匯合時就會涉及到路權(quán)。
有些道路的優(yōu)先級高于其他道路,在這些道路上行駛的汽車就擁有路權(quán)。RSS模型涉及到部分場景的解決方法,后期仍然需要擴(kuò)展模型,并對安全距離的計算進(jìn)行必要調(diào)整。
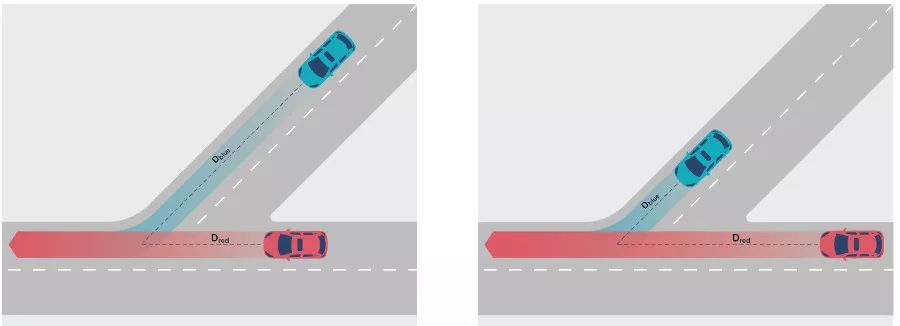
為了更好地理解路權(quán),我們需要先定義一個名詞:縱向順序(Longitudinal Ordering),用來代表距離交叉點(diǎn)的直線距離。如下圖所示,左圖中,在縱向順序上紅車在藍(lán)車前面,因為Dred < Dblue;右圖反之。
和上文提到的公式化安全距離一樣,我們同樣可以定義多道路交叉時的縱向安全距離。如下圖所示,紅車擁有路權(quán),優(yōu)先級高,那么藍(lán)車必須在進(jìn)入路口前的安全距離內(nèi)進(jìn)行剎車,從而保證紅車正常行駛。
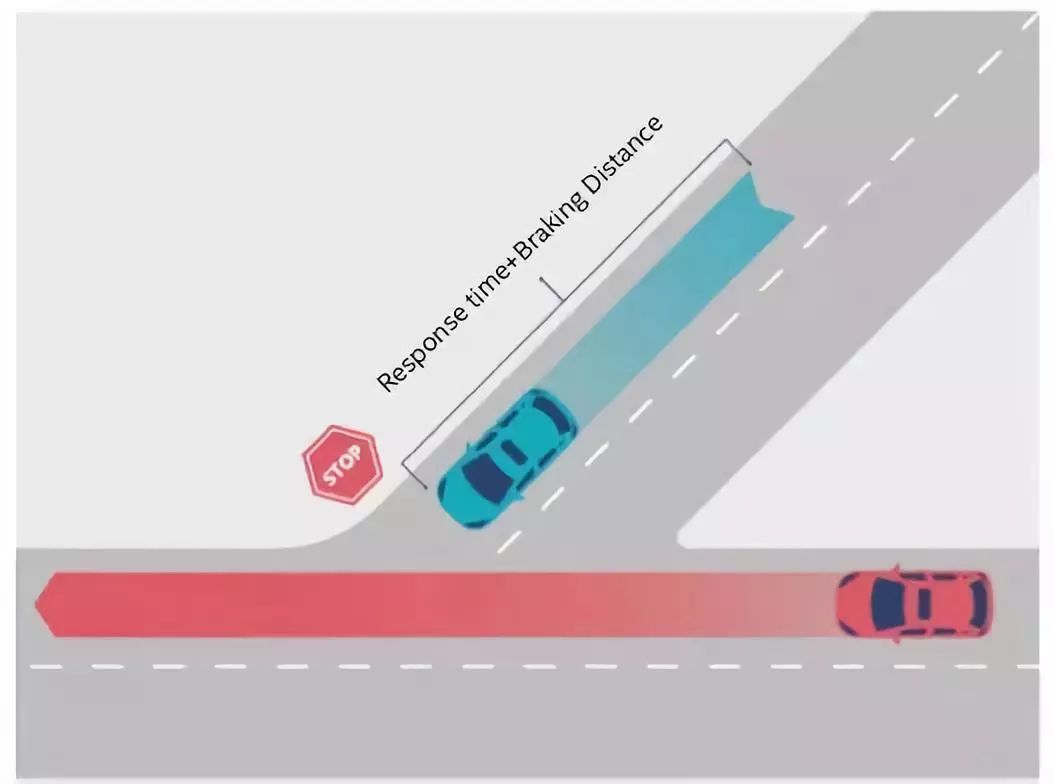
如前文所述,RSS并不是刻板地以路權(quán)做為唯一判斷,比如在下圖中,藍(lán)車來不及剎車闖入了紅車的車道,紅車也要采取剎車以避免碰撞。
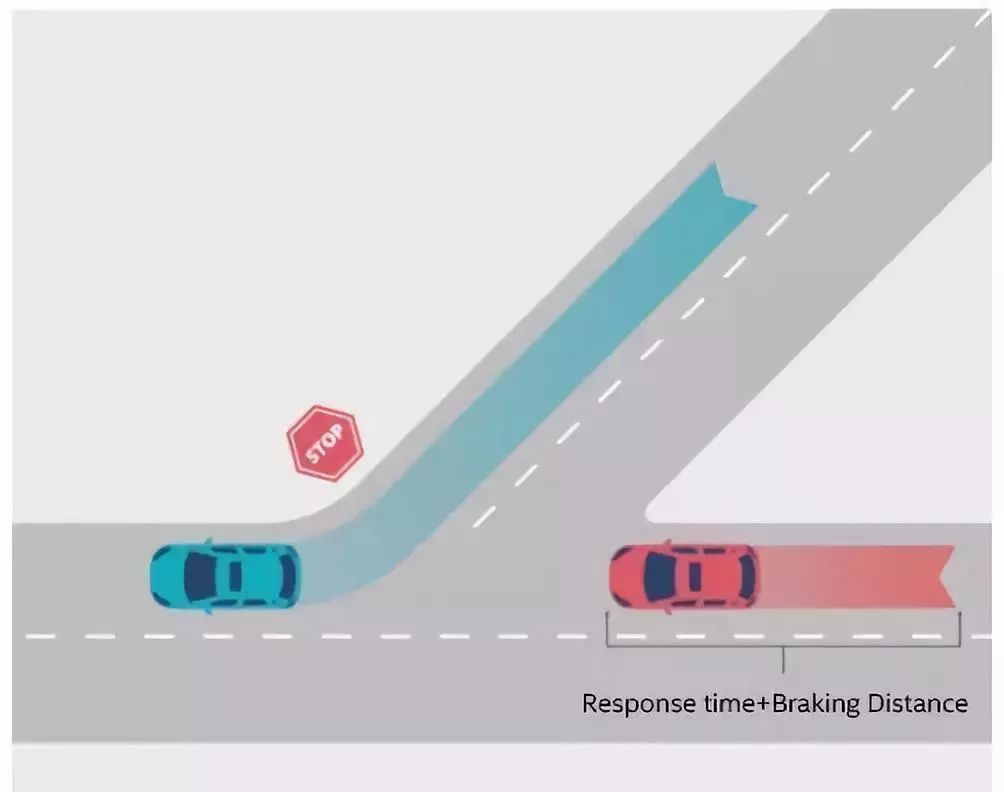
甚至,RSS模型還可以支持輕微橫向位移來避免撞擊,如下圖所示:
行人和遮擋
對于行人,首先需要明確行人的路線和優(yōu)先級。某些地方行人的路線很明確,如人行道或者交叉路口的斑馬線。這些地方自動駕駛汽車在自己車道上行駛時,一般無需擔(dān)心行人會突然闖進(jìn)來,車有優(yōu)先權(quán),但是也必須遵循靈活運(yùn)用路權(quán)的原則。
但在有些地方,如居民區(qū)內(nèi),行人路線不明確,這時必須謹(jǐn)慎駕駛,給行人更高的優(yōu)先權(quán)。考慮到人類的反應(yīng)時間大概是500ms,最大加速度是2m/s2(博爾特的加速度是3.09m/s2)。那么,根據(jù)之前的公式,車輛與行人之間的安全距離是50cm,行駛時必須保證處于這個安全距離之外。
另外,需要格外注意有遮擋的環(huán)境。下圖中的車輛正在通過一排停車位,一名兒童突然以速度10km/h的速度跑過來(比如在追球)。根據(jù)計算,10km/h的速度必須要保持15m的安全距離才可能避免碰撞發(fā)生。但此時汽車側(cè)方的視野只有0.3m,顯然無法滿足安全要求。在這種情況下,RSS模型做了如下定義:
在車輛可以發(fā)現(xiàn)目標(biāo)的第一時間(Te)到反應(yīng)時間結(jié)束時(Te + ρ),車輛沒有加速,且到發(fā)生撞擊或者完全停下來的時刻(Ts),車輛一直以不低于αmin,brake的加速度在剎車
從Te到Ts這段時間內(nèi),車輛的平均速度低于行人的平均速度
這種情況下車輛是沒有責(zé)任的。這個定義隱含的論點(diǎn)是:在發(fā)生撞擊的時刻,車輛的速度比行人的速度低,或者兩者都移動得很慢,從而使撞擊的傷害降到最低。
RSS模型通過語義方式來描述測量結(jié)果、操作空間等,來指導(dǎo)無人駕駛汽車的規(guī)劃、感知和動作。
這種語義可以理解為我們學(xué)交規(guī)時的駕駛規(guī)范。
例如,它不會做出這種描述:以當(dāng)前速度開13.7米,然后以0.8m/s2的加速度加速前進(jìn),而是會發(fā)出語義指令,如“跟隨前車”或者“從左側(cè)超車”。
與人類駕駛類似,RSS提供的這個語義模型,并不是加速度矢量的幾何運(yùn)算,而是關(guān)于縱向或者橫向目標(biāo)的描述。
這對降低規(guī)劃的運(yùn)算復(fù)雜度(不會隨著時間或鄰車數(shù)量的增加而呈指數(shù)上升)、提升安全性和舒適性交互、以及傳感器融合方面都至關(guān)重要。由于采用了語義模型,離線驗證數(shù)據(jù)庫只需要10^5量級的駕駛數(shù)據(jù),就可以保證RSS模型達(dá)到死亡率10^-9次/小時的安全要求。
RSS模型的開發(fā)者,Amnon Shashua教授(英特爾子公司Moblieye公司首席執(zhí)行官兼首席技術(shù)官)曾說: “世界上最優(yōu)秀的人類也無法避免超出他們控制能力的事故,自動駕駛汽車亦然。但是最負(fù)責(zé)、最老練、最謹(jǐn)慎的司機(jī),不太可能由于自己的過失導(dǎo)致事故,特別是像自動駕駛汽車擁有360度視力和閃電般反應(yīng)速度的話。”
英特爾無人駕駛解決方案資深首席工程師、首席系統(tǒng)架構(gòu)師,Jack Weast解答RSS。
Q:RSS通過數(shù)學(xué)公式來定義安全狀態(tài),會不會出現(xiàn)比較刻板的現(xiàn)象?是否可以理解為RSS完全是通過傳統(tǒng)的機(jī)器學(xué)習(xí)的算法來實(shí)現(xiàn)自動駕駛的規(guī)劃和決策,它不考慮深度學(xué)習(xí)、人工智能對優(yōu)化決策的影響?如何保證RSS所有場景覆蓋的全面性,以及目前英特爾和Mobileye在對RSS模型測試中,是否有值得借鑒的成果?
Jack Weast:在整個RSS中用了各種各樣的人工智能的方法,具體在駕駛策略方面,我們用的是叫增強(qiáng)學(xué)習(xí)。
增強(qiáng)學(xué)習(xí)的好處是什么?
它可以定制駕駛的方式,因為增強(qiáng)學(xué)習(xí)是,如果你做了這一個判斷,它是有一個獎勵機(jī)制在里面的,所以對于汽車自己的駕駛來說,它可以做定制化。但談到整體的人工智能技術(shù),我們有深度學(xué)習(xí),尤其是在自動駕駛車的認(rèn)知、計算機(jī)視覺方面用的是深度學(xué)習(xí)。機(jī)器學(xué)習(xí)我們也有用到。
有關(guān)第一個數(shù)學(xué)公式的問題。在我們的數(shù)學(xué)公式中有一些是常數(shù),是不變的,有一些是變量,這個變量可能更會因地制宜一些。
比如在中國,我們在設(shè)置汽車變道的距離方面就是一個變量,因為在中國可能汽車變道留的距離更短一些。這也是為什么我們和清華大學(xué)等中國的高校和中國的政府機(jī)構(gòu)合作。比如政府從道路監(jiān)管方面可以接受的風(fēng)險,比如在住宅小區(qū)里限速很低,在高速公路限速高得多。所以我們會通過變量的設(shè)置來去調(diào)整。
為什么我們把RSS拿出來和業(yè)界進(jìn)行共享的原因。美國政府曾經(jīng)就所有撞車的事故發(fā)布過一篇研究報告,其中總結(jié)了37個撞車前的場景。
這種歸類是基于美國政府相關(guān)機(jī)構(gòu)收集的多年的在美國發(fā)生的交通事故所做出來的,基本上可以覆蓋99.4%的撞車類型的交通事故的情況。我們也用RSS和美國政府的研究報告的結(jié)果做了一個比對,發(fā)覺RSS完全覆蓋了這37種類型的撞車前的場景。但我要強(qiáng)調(diào)的是,這是在美國的情況,而且不是百分之百,因為只覆蓋了99.4%的汽車事故,這也是為什么我們要和中國的高校合作建立這樣的一個研究中心。
我們希望能夠有更多中國的交通數(shù)據(jù)。目前,我們RSS已經(jīng)在以色列進(jìn)行車輛的路測,很快在美國也會做相應(yīng)的路測,我們希望通過和中國的合作能把RSS拿到中國來。
Q:如果在道路上跑的車輛都是自動駕駛的車,因為自動駕駛會非常守規(guī)矩,整個交通的安全狀況就非常好判斷,安全系數(shù)比較高。但實(shí)際情況來看,未來很長一段時間內(nèi)是自動駕駛和傳統(tǒng)駕駛的車輛混合的交通方式。從技術(shù)上如何建立更加平衡的交通體系來保證安全?
Jack Weast:其實(shí)這正是RSS誕生的初衷。
因為在RSS的模擬測試中,自動駕駛的數(shù)據(jù)公式完全是根據(jù)人類駕駛的方式和習(xí)慣來設(shè)定的。所以模擬測試也展現(xiàn)出來,其實(shí)基于RSS的自動駕駛車輛的駕駛反映操作是擬人的,基本上和人類駕駛員是一樣的。
舉個例子,如果是自動駕駛車,它被其他人類駕駛的汽車從側(cè)方別住了,如果是人類駕駛車肯定會減速甚至停下來,如果是基于RSS的會有同樣的處理。
其實(shí)還有一部分的內(nèi)容我可能沒有講,也就是說在RSS中會有這樣的一個場景,就萬一發(fā)生了交通事故,警察來現(xiàn)場進(jìn)行處理,我們要勘察交通事故的現(xiàn)場,并且進(jìn)行責(zé)任的認(rèn)定。
基于RSS的自動駕駛車輛對于安全設(shè)定的原則叫適當(dāng)?shù)姆从常瑏肀U习踩R簿褪钦f它和人類的安全理念是同樣的,因此在責(zé)任鑒定上到底是人駕駛車的責(zé)任,還是自動駕駛車的責(zé)任,因為基于的理念是一樣,所以更容易判斷。
Q:首先RSS模型最后呈現(xiàn)的產(chǎn)品形態(tài)是什么樣的?因為現(xiàn)在知道它是一個模型,是軟件的東西、算法的東西,最后呈現(xiàn)在車上的狀態(tài)是什么樣的?現(xiàn)在跟大學(xué)和科研院所合作,包括你們在以色列那邊做測試,做測試的時候和做合作的時候到底在合作什么內(nèi)容?
Jack Weast:首先,RSS雖然是英特爾公司的,但我們希望把它作為一種資源貢獻(xiàn)給業(yè)界使用。
它其實(shí)就是代碼,這個代碼可以被別人的產(chǎn)品用,當(dāng)然“別人的產(chǎn)品”我指的是自動駕駛車的基于AI的軟件。它會和所有的不同自動駕駛車軟件兼容,都是可互操作的,可以有不同的實(shí)施方式,可以在CPU上或者是FPGA上。
至于其他的廠家怎么用,他們可以完全用自己的創(chuàng)新去做。而我們的RSS更多的是一套技術(shù)規(guī)范,或者是行業(yè)的標(biāo)準(zhǔn)。我們其實(shí)非常希望在中國可以做很多的事情,因為中國在這方面肯定會有自己本土化等各方面的創(chuàng)新。
在以色列RSS的路測是在耶路撒冷的實(shí)際道路上。你也知道耶路撒冷的路況非常復(fù)雜和混亂。我們在網(wǎng)上有一些視頻,就是帶著RSS的自動駕駛車輛在實(shí)際道路上做變道的駕駛實(shí)際情況。我們也非常希望在中國做RSS的實(shí)際路測。
Q:之前有很多新聞報道英特爾和Mobileye的車在以色列做路測的時候,有闖紅燈的情況,這種情況下是否有你們RSS的模型?
Jack Weast:闖紅燈的路測車?yán)镉袥]有使用RSS模型,這個我現(xiàn)在不是很清楚,需要再去確認(rèn)一下。
但無人駕駛車闖紅燈是一個很好的例子。因為那個路口有交通監(jiān)控的攝像頭,那個攝像頭是無線的攝像頭,它發(fā)出了信號干擾到了無人駕駛車本身的傳感器,它要感知那個紅燈,被攝像頭一干擾就感知不到紅燈了。
我們覺得這是一個非常好的例子,就是不能依賴于外界的能力,車本身必須要有非常強(qiáng)的能力來做這樣的自動駕駛,否則的話外界的一個因素可能就影響到它了。
因為如果是純?nèi)斯ぶ悄軄碜鲴{駛決定的車,在實(shí)際非常復(fù)雜的路面狀態(tài)下,它連路都上不了,它要從匝道上到主道上根本上不去。但有RSS的車輛就不一樣了,我們有一個專門的視頻,在非常復(fù)雜、混亂狀況的交通路面上,RSS無人駕駛車成功上路,變道成功。
事實(shí)上我剛才談到了對于自動駕駛車輛而言有三個層面:感知、規(guī)劃、行動。而我們的RSS其實(shí)就是圍繞第二個規(guī)劃的層面,我們包裹了一層安全的防護(hù)。
但是我們談到RSS的安全一定要基于第一個層面,就是感知,你的感知必須是準(zhǔn)確的,要獲得準(zhǔn)確的感知,我們覺得不能只依賴于一套感應(yīng)的系統(tǒng)。所以在RSS的自動駕駛車輛上有兩套獨(dú)立的感知系統(tǒng),一套是自動駕駛,比如地圖以及自己的攝像頭,這是一套感知的系統(tǒng)。另外一套獨(dú)立的感知系統(tǒng)就是我們談到的無線電雷達(dá)和激光雷達(dá)。通過并行的感知系統(tǒng),可以把感知的錯誤率降到最低。
Q:這個模型加進(jìn)去以后對整個車的系統(tǒng)有什么影響?
Jack Weast:關(guān)鍵是看你如何實(shí)施了。
其實(shí)從英特爾Mobileye的解決方案可以看到,我們這個產(chǎn)品是軟件一體的、低功耗、低成本的計算設(shè)施。
首先,它的硬件是專門用途的,針對自動駕駛的軟件做了定制化優(yōu)化,所以它的能耗比較低。同時,我們知道在業(yè)界有很多其他廠商的做法是使用通用計算的平臺,但通用計算的平臺毫無疑問必須在計算資源方面做到融合設(shè)計來支持一些你并不一定要用到的軟件功能,但我們無需這樣做,比如Mobileye EyeQ的產(chǎn)品線,本來它用于通用計算的部分特別少,絕大部分都是做定制化,對上層的軟件算法加速的。
所以我們的產(chǎn)品能夠真正實(shí)現(xiàn),我們非常有信心能提供低成本、低功耗的自動化駕駛的解決方案。其實(shí)最關(guān)鍵的一點(diǎn)是我們軟硬配套的定制化設(shè)計。
Q:除了RSS以外,世界上還有哪些主流的自動駕駛模型?這些模型彼此之間的區(qū)別和分歧在哪里,英特爾剛才說的是標(biāo)準(zhǔn),英特爾打算如何讓自己的模型成為行業(yè)標(biāo)準(zhǔn)。這個模型對自動駕駛的開發(fā)會起到什么作用,能舉幾個具體的例子嗎?
Jack Weast:我先回答第三個問題。這種責(zé)任模型是非常重要的,為什么?
因為自動駕駛車的安全驗證,讓人們?nèi)绾涡湃嗡陌踩@種方法必須是開放和透明的方法。
也就是說我們不可能去信任一個封閉的專有的系統(tǒng),說它是安全的。我們通過RSS能夠做到這三點(diǎn),也就是開放、透明和可驗證,能夠讓每一個參與的人都去信任自動駕駛車。
確實(shí),在業(yè)界有很多類似于RSS的模型存在,這也是為什么把RSS拿出來和業(yè)界共享的原因,因為我們覺得存在類似的模型是一件好的事情,我們可以互通有無,最后共同做出一個大家都遵守的、政府也支持的責(zé)任模型。
我們談到這種責(zé)任模型并不是一個新的概念,其實(shí)在工業(yè)系統(tǒng)、自動化系統(tǒng),在航空領(lǐng)域早就存在了。比如在航空領(lǐng)域有飛行控制系統(tǒng),如果它感知到飛行員會做任何導(dǎo)致飛機(jī)比如墜機(jī)的操作,它就會立刻從機(jī)器控制方面阻止飛行員做任何類似的操作。還有在工業(yè)界,我們知道有機(jī)械手臂,機(jī)械手臂本身也是適用于“安全信封”的系統(tǒng)。我們現(xiàn)在嘗試的是把工業(yè)自動化系統(tǒng)的概念應(yīng)用到自動駕駛車這個領(lǐng)域。
Q:總的感覺RSS這個模型現(xiàn)在的技術(shù)還是不夠完善,還在各種測試,這個技術(shù)在未來幾年會不會相對成熟一些?
Jack Weast:為什么我們今天會和中國這兩家大學(xué)研究機(jī)構(gòu)之間的成立合作研究中心,也是因為我們覺得RSS確實(shí)需要完善。在加州做路測,其實(shí)路況還是要好得多,但是在中國這樣一種更加高級復(fù)雜化的路況之下做路測,對使得RSS的安全場景更全面。一般來說,我們必須達(dá)到自動駕駛的三級以上,三到四級。而且目前主流的廠商都在說達(dá)到三級、三級以上的自動駕駛時間點(diǎn)應(yīng)該是在2020-2021年。所以這也是我們RSS同樣的時間點(diǎn)。我們目前的想法,RSS的第一次部署應(yīng)該是在2021年左右,可能會早一年,也可能會晚一年,具體是看實(shí)際整車廠商,我們客戶的具體時間點(diǎn)。但從現(xiàn)在到2021年之間,RSS還需要做大量的路測。
Q:能夠把RSS定義為自動駕駛的,好比是阿西莫夫三定律之于機(jī)器人的道理?
Jack Weast:對,可以這么理解。就像機(jī)器人規(guī)定不能傷害人類一樣。其實(shí)RSS是我們對自動駕駛車打的一圈保險封條。因為我們知道人工智能系統(tǒng)不會是完整的,RSS的目的是保證自動駕駛車不會對人類或者是對其他的包括車載內(nèi)的物體造成傷害。
因此,RSS其實(shí)是為自動駕駛車規(guī)定了基本原則。
-
英特爾
+關(guān)注
關(guān)注
60文章
9880瀏覽量
171501 -
自動駕駛
+關(guān)注
關(guān)注
783文章
13683瀏覽量
166146
原文標(biāo)題:自動駕駛Intel Inside時代來臨?
文章出處:【微信號:Intelzhiin,微信公眾號:知IN】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
線控底盤,自動駕駛時代的基石?
自動駕駛汽車安全嗎?


自動駕駛HiL測試方案案例分析--ADS HiL測試系統(tǒng)#ADAS #自動駕駛 #VTHiL
自動駕駛技術(shù)的典型應(yīng)用 自動駕駛技術(shù)涉及到哪些技術(shù)



FPGA在自動駕駛領(lǐng)域有哪些優(yōu)勢?
FPGA在自動駕駛領(lǐng)域有哪些應(yīng)用?
自動駕駛邁向3.0時代!車企爭搶城市無圖NOA,大模型端到端方案加速迭代
迎來“CASE”時代的汽車趨勢和技術(shù)課題(3) ~自動駕駛和識別引擎~
未來已來,多傳感器融合感知是自動駕駛破局的關(guān)鍵
自動駕駛發(fā)展問題及解決方案淺析
LabVIEW開發(fā)自動駕駛的雙目測距系統(tǒng)
自動駕駛“十問十答”






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論