 關于一種基于動態規劃的機動目標檢測前跟蹤方法
關于一種基于動態規劃的機動目標檢測前跟蹤方法
0 引言
檢測前跟蹤(Track-Before-Detect,TBD)技術是一種有效的雷達微弱目標檢測方法,并且在多個領域有著廣泛的應用。這種技術不對單幀的數據做目標檢測判決或航跡回溯,而是通過對目標的多幀數據信息進行積累,之后宣布檢測結果并同時給出目標的運動軌跡。動態規劃(Dynamic Programming,DP)算法是檢測前跟蹤技術中的一種[1-4],它利用窮盡搜索的思想,將目標的整體軌跡搜索問題分解為分級優化的問題,具有效率高、硬件可實現的優點。
基于動態規劃的檢測前跟蹤算法最早應用于紅外弱目標的檢測上,近年來該檢測算法也應用到雷達系統當中[5-6]。這些應用均假設目標具有勻速直線運動或慢機動目標運動特性,利用目標的初始速度確定動態規劃算法針對每一幀的搜索范圍,從而匹配目標的運動軌跡,達到較好的檢測跟蹤效果。然而,一旦運動目標不具有勻速直線運動或者慢機動目標運動特性時,由于運動模型不匹配,搜索范圍將發生很大變化[7],從而不能夠有效地對目標進行檢測跟蹤,動態規劃算法的性能嚴重下降。
本文將動態規劃算法與交互式多模型濾波算法結合在一起,提出了一種新的針對機動目標的檢測前跟蹤算法。該算法根據近程毫米波雷達探測范圍內的目標為行人或機動車輛的特點,引入多個目標運動模型取代傳統單一模型跟蹤方法[8-9],在每一組數據動態規劃算法處理后,針對之前的運動狀態,采用交互式多模型濾波算法對各個模型的概率進行調整,并按照相應的概率對每個模型的狀態估計進行加權,實現機動目標運動模型的更新。
1 問題模型描述
1.1 目標運動模型集
1.2 目標量測模型
假設量測平面有Nx×Ny個分辨單元,并且各分辨單元和各幀之間的觀測噪聲相互獨立,第k時刻的量測數據可通過一個Nx×Ny的矩陣表示為:
其中,Ck表示點目標在分辨單元(i,j)處的信號強度;wk為分辨單元(i,j)處的觀測噪聲,并滿足均值為零、方差為σ2的高斯分布。
2 算法介紹
2.1 動態規劃算法原理和步驟
動態規劃算法在狀態轉移區域中通過對可能的目標運動軌跡和值函數的積累,提高目標的信號強度,從而實現對微弱目標的檢測跟蹤性能改善。其核心思想是利用分段優化的辦法,將高維優化搜索的問題分解為多個低維優化問題,大大減小了計算量。假設動態規劃算法一次循環中有K幀數據,具體的操作步驟如下:
由上可知,目標的轉移范圍和運動方向是由目標的初始位置和速度決定的。傳統動態規劃算法假定目標做勻速直線運動或者具有弱機動特性條件下,設定目標的初始速度,具有良好的檢測性能;然而,當目標做轉彎運動或者勻加速運動時,搜索范圍與目標模型不匹配,動態規劃算法的性能會嚴重下降。如果加大搜索范圍或每相鄰兩幀通過濾波算法對速度實時更新,算法的復雜度和運算量都會大幅度增加,不利于實時響應運算和工程化實現。
2.2 多模型動態規劃算法
為了彌補動態規劃算法不適用于機動模型的局限性,同時不增加過多的計算負擔,本文提出了多模型下的動態規劃算法,該算法將交互式多模型濾波中的多模型及模型切換引入到動態規劃算法中。根據近程毫米波雷達探測目標的運動特性,本文利用3種可能的運動模型進行建模描述,記目標進行勻速運動的運動模型為M1(t),目標進行勻加速運動的運動模型為M2(t),勻速轉彎運動的運動模型為M3(t)。
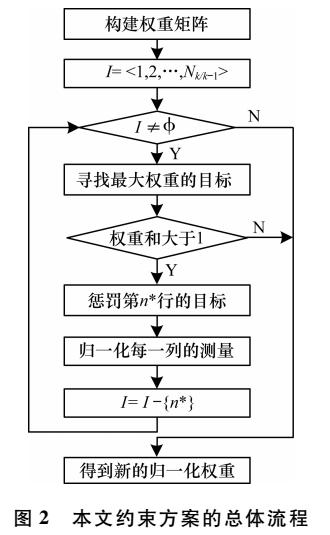
本文提出的交互式多模型動態規劃算法具體實現過程中,首先根據近程毫米波雷達掃描周期快(掃描周期T≤10 ms)的特點,近似認為目標在動態規劃算法一個循環周期內的K幀運算數據近似保持勻速直線運動;為了能夠預測和跟蹤機動目標,在完成一個循環周期的動態規劃算法后,結合前一個周期目標的初始狀態,采用多模型濾波方法預測目標的狀態,作為下一動態規劃算法周期的初始值。具體算法流程為:
3 實驗結果與仿真分析
本文采用了基于短時寬鋸齒波調制方式來探測目標,發射機在一個周期內連續發射多個短時寬鋸齒波,對所有鋸齒波的一維FFT結果在另一個維度上再做一次FFT(二維FFT),從而得到探測范圍內的二維距離-速度信息,具體參數如表1所示。
3.1 轉彎運動目標仿真
仿真實驗目的是比較多模型動態規劃算法與傳統動態規劃算法檢測轉彎目標性能。假設目標初始位置狀態為(x1,y1)=(12,20)(單位:m),積累幀個數K=3,虛警率Pfa=1×10-3,轉彎速率w為0.1 rad/s、0.25 rad/s、0.5 rad/s,Monte-Carlo仿真次數為1 000次。
圖2給出了轉彎運動航跡檢測的仿真結果。當w=0.1 rad/s時,兩種算法的性能差別不大;當w為0.25 rad/s、0.5 rad/s時,多模型動態規劃算法性能在SNR>10 dB以后明顯優于傳統動態規劃算法,在w=0.25 rad/s時,多模型動態規劃算法的檢測概率要高約15%,在w=0.5 rad/s時高約21%。結果表明,當w≥0.1 rad/s時,目標的轉彎行為更為明顯,多模型動態規劃算法的性能要比傳統動態規劃算法好。
仿真結果表明,當w很小時,目標做近似勻速直線運動,此時多模型動態規劃算法的檢測性能沒有太大的優越性;隨著w的增大,目標做轉彎運動,多模型動態規劃算法比起傳統的動態規劃算法具有更高的檢測概率及更好的跟蹤性能。
3.2 勻加速運動目標仿真
仿真實驗的目的是比較多模型動態規劃算法與傳統動態規劃算法檢測勻加速目標的性能。假設目標的初始位置狀態為(x1,y1)=(12,20)(單位:m),動態規劃積累幀個數K=5,航跡虛警概率Pfa=1×10-3,目標加速度(ax,ay)為(0.1,0.1)、(0.1,1)、(0.1,2)(單位:m/s2),Monte Carlo仿真次數為1 000次。
圖3為本文方法與傳統動態規劃算法的對比,當(ax,ay)為(0.1,0.1)(單位:m/s2)時,目標近似為勻速直線運動,此時多模型動態規劃算法基本等同于傳統算法。當(ax,ay)為(0.1,1)和(0.1,2)(單位:m/s2)時,多模型動態規劃算法性能在SNR>10 dB以后明顯優于傳統動態規劃算法,仿真結果顯示多模型動態規劃算法的性能要比傳統動態規劃算法好。
4 結論
針對動態規劃算法檢測機動目標效果差的問題,本文提出了一種基于交互多模型的動態規劃檢測前跟蹤算法。該算法將交互多模型的模型轉換和狀態預測融入到動態規劃的過程中,從而實現對目標模型的動態估計和轉換,避免了單一的目標模型引起的搜索范圍失效導致無法有效檢測機動目標的缺陷。仿真結果顯示,基于交互多模型的動態規劃算法在檢測機動目標時的性能要明顯優于傳統動態規劃算法,同時具有較快的處理速度,便于工程化實現。
-
雷達
+關注
關注
50文章
2904瀏覽量
117348 -
毫米波
+關注
關注
21文章
1916瀏覽量
64707
發布評論請先 登錄
相關推薦
基于Mean Shift的紅外目標自動跟蹤方法
一種用于三維空間雜波環境機動目標跟蹤的數據互聯方法
一種基于Hausdorff距離的目標跟蹤算法

一種約束權重的改進多目標跟蹤方法






 工商網監
工商網監
評論