 一文了解自動駕駛的前世今生
一文了解自動駕駛的前世今生
自動駕駛汽車通過攝像頭、雷達和激光雷達等傳感器來感知世界。類似雷達,激光雷達,使用不可見的光脈沖來繪制周圍區域的高精度3D地圖。攝像頭、雷達和激光雷達三者是相輔相成的關系。攝像頭便宜,可以看到道路標記,但卻不能測量距離;雷達可以測量距離和速度,但卻捕捉不到細節;激光雷達提供了很好的細節,但是價格昂貴,并且容易將雪地和其他地形混淆。
現代汽車時代是從競爭開始的。
在19世紀90年代早期,人們對新興的無馬車技術產生了濃厚的興趣,當時,它有望集火車的速度、馬車的靈活性和自行車的便利性于一身。法國的Le Petit Journal報社憑借其強大的宣傳影響力舉辦了一場比賽,欲比較出蒸汽、電力或汽油三者誰才是最佳的推動力。該報邀請參賽者從巴黎開車到79英里外的魯昂。該評比并不是以他們車輛的速度來一較高下,而是考察這些車是否安全、易于使用和有商業價值。
這場比賽于1894年7月舉行,共有21輛全新發明的車從巴黎出發,吸引了眾多圍觀者。最后,只有17輛車完成了比賽。比賽路上,有七條狗被撞倒,一名自行車手受傷。最終,贏得大獎的,是一名叫做Gottlieb Daimler(哥特利布·戴姆勒)的發明家。
*戴姆勒
在這次比賽中,他一共派出了9輛由其發明的內燃機驅動的汽車,其中,有4輛同時獲得了一等獎。裁判宣布,戴姆勒為車輛提供了“石油或汽油燃料轉化成的內在動力”,這種車開始有了一個法語名字——“Automobile”(汽車)。戴姆勒的勝利確立了汽車在20世紀的霸主地位,汽車這個術語很快就滲透到英語和其他語言中。
有意思的是,現代自動駕駛汽車的時代也是從比賽開始的。2004年3月,美國主要的軍事研究機構DARPA在莫哈韋(Mojave)沙漠組織了一場比賽,要求無人駕駛車輛駕駛150英里的越野路線。這場比賽共有21支隊伍獲得參賽資格,但經過賽前評比和意外事故后,最終只有12輛車參賽。由于機械故障和陷入沙坑等問題,所有參賽隊伍都沒有跑完全程。卡內基梅隆大學的“沙塵暴”(Sandstorm),跑出了最佳成績,在被卡住之前行駛了7.4英里。在它試圖解救自己的時時候,不幸前輪起火。
看來DARPA似乎設置了太高的標準。2005年10月,他們舉行另一場比賽時,23支參賽隊伍中有5支完成了132英里的路程,剩下的,只有一支隊伍未能完成一年前的7.4英里的記錄。斯坦福大學Sebastian Thrun所領導的一支隊伍獲得第一名,卡內基梅隆大學的“沙塵暴”排名第二。
*Sandstorm
在短短的18個月里,自動駕駛就從不可能變成了可能。在2007年11月的第三次DARPA比賽中,參賽車輛必須在模擬的城市環境中完成任務,處理路標、交通信號和其他車輛等問題。11支團隊中,有6支完成了這個更復雜的挑戰。
這種快速的發展步伐,令Google在2009年建立了由Thrun領導的自動駕駛汽車項目。自那時起,DARPA競賽的參賽者們已經開始在Google、Uber、特斯拉和許多初創公司開展自動駕駛技術研究。2012年,自動駕駛原型車開始進入美國公共道路,他們已經行駛了數百萬英里,也變得更加安全可靠。但這項技術離大規模部署還有一段距離。
真正的完全自動駕駛汽車必須解決三個獨立的任務:感知(了解周圍世界發生了什么)、預測(確定下一步會發生什么)和駕駛策略(采取適當的行動)。Thrun說,最后一個任務是最簡單的,自動駕駛中只有10%的問題與之有關,而感知和預測則是較困難的部分。
自動駕駛汽車通過攝像頭、雷達和激光雷達等傳感器來感知世界。類似雷達,激光雷達,使用不可見的光脈沖來繪制周圍區域的高精度3D地圖。攝像頭、雷達和激光雷達三者是相輔相成的關系。攝像頭便宜,可以看到道路標記,但卻不能測量距離;雷達可以測量距離和速度,但卻捕捉不到細節;激光雷達提供了很好的細節,但是價格昂貴,并且容易將雪地和其他地形混淆。
大多數從事自動駕駛工作的人都認為,有必要將幾種傳感器組合起來確保安全性和可靠性。(不過,特斯拉是一個明顯的例外:它希望在不使用激光雷達的條件下實現完全自動駕駛)。目前,高端的激光雷達系統要數萬美元,初創公司正在研發新的固態激光雷達,有望最終將激光雷達的價格降低到幾百美元。
結合來自傳感器的數據后,汽車需要識別周圍的物體:其他車輛、行人、騎自行車的人、路面標記、道路標志等。在識別方面,人類比機器要好得多,機器必須通過大量仔細標記的樣本訓練過后才有這樣的能力。獲得這些樣本的一種方法是雇人手動標記圖像。
位于西雅圖的Mighty AI擁有一個30萬人的在線社區,他們為許多汽車企業客戶標記街景圖像。“我們希望汽車能夠有人的判斷力,”Mighty AI的老板Daryn Nakhuda說,“因此我們需要人類專業技能的幫助。”
一些來自視頻游戲的圖像,如《俠盜獵車手》中的圖像,與現實街景非常接近,也可以起到幫助做用。因為游戲軟件知道一切事物,它可以準確地標記這些場景,因此這些圖像也可以用于訓練。
Thrun說,最難識別的是那些很少見的東西,例如路上的垃圾或是在高速公路上被吹起的塑料袋。他回憶起Google的自動駕駛項目早期的時候,“我們的感知模塊無法區分出物體究竟是塑料袋還是飛奔的孩子。”路上的水坑也讓識別系統混淆。不過,結合來自多個傳感器的數據就可以分辨道路上的物品是否為堅硬的障礙物。
傳感器獲得的數據還能夠與先前在同一條路上行駛的其他車輛收集的傳感器數據進行比較,這種相互交流的過程被稱為“車隊學習”。自動駕駛的先行者們已經積累了許多的數據,這讓他們占一定的優勢,但一些創業公司也在制作和銷售現成的供自動駕駛汽車使用的高精度地圖。
一輛車識別出周圍的一切之后,它就需要立刻預測未來幾秒會發生什么并決定如何應對。道路標志,交通信號燈,停車燈和轉向標志也提供了一些提示。但是,自動駕駛車輛在某些地方還離人類駕駛員還是有差距的,人類駕駛員擅于處理一些意外情況,例如道路施工、拋錨的車輛、運輸卡車,緊急車輛、倒下的樹木或惡劣的天氣等。雪是一個特殊的挑戰:激光雷達系統必須仔細調整才能忽略飄落的雪花,道路積雪也會降低高精度地圖的準確度。
雖然高精度地圖技術仍在開發中,但它對于一些限定的地區還是有幫助的,這些地區已有了詳細繪制的地圖并且通常天氣很好。這就解釋了為什么陽光燦爛、道路規劃整齊的鳳凰城能成為測試自動駕駛車輛的熱門城市。而匹茲堡則由于其惡劣的天氣,是一座測試難度比較大的城市。
被通用汽車收購的自動駕駛創業公司Cruise,則選擇在舊金山市中心復雜的街道上進行測試,其表現也給人們留下了深刻的印象。Cruise的創始人 Kyle Vogt認為,在人口稠密的環境中進行測試意味著汽車會經常遇到異常情況,因此能學得更快。
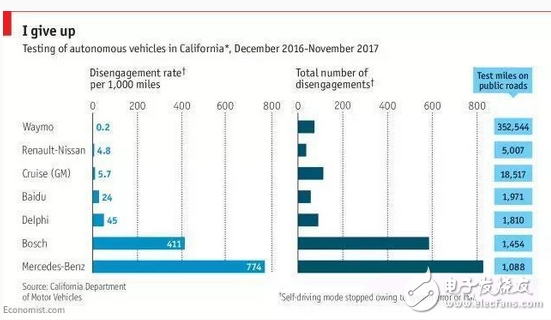
當自動駕駛車輛感到困惑并且不知道如何回應或做出錯誤決定時,駕駛座上的安全工程師就會接管。這就是所謂的“脫離”,每千英里的脫離數為對比自動駕駛相關公司提供了一個粗略衡量標準(見上圖表)。不過,最好還是不要將脫離視為失敗的情況,脫離其實是有助于自動駕駛系統吸取經驗并改進的。
Uber自動駕駛汽車部門的安全負責人Noah Zych表示,在接近脫離狀態時記錄的傳感器數據可以揭示汽車出了什么問題。然后就可以在模擬中對同一問題進行測試,然后修改軟件。Zych說:“我們可以一次又一次地測試,改變情景,分析不同的結果,”改進后的軟件最后會在真實汽車中使用。
就算自動駕駛現在就能被廣泛部署,他們仍然偶爾需要人的幫助。無人駕駛接駁車制造商Navya的CEO Christophe Sapet舉了個例子:在一個兩車道的路上,自動駕駛汽車由于不敢越過道路中的實線而追尾了一輛拋錨的卡車。產生這種結果的原因,是自動駕駛汽車被編程、被設定必須遵守交通規則(而不會隨機應變)。但如果是人類,只要對面沒車,就會壓過實線繞開這兩卡車。
Navya的自動駕駛車輛則會向遠程監督中心求助,人類操作員可以看到車輛攝像頭拍攝的實時信號。遇到剛剛所說的情況時,操作人員并不會直接遠程控制一起,而是在保證安全的情況下允許該車壓過實線行駛。Thrun預測,這些操作員在未來可能會一次監控數千輛自動駕駛車。
與此同時,低配版的自動駕駛在正在逐漸加入到現有的汽車之中。由美國汽車工程師協會制定的量化表將自動駕駛水平分成了5個等級。Level 1級別的自動駕駛包括基本的協助(如巡航控制)。Level 2級別增加了諸如車道保持等功能,令汽車能夠在高速公路上行駛,但仍要求駕駛員時刻注意。奧迪今年推出的A8是第一款達到Level 3級別的車型,它能夠自動駕駛并監控周圍環境,但在系統要求時,駕駛員及時必須接管。
*奧迪A8
Waymo、Uber和其的公司則試圖直接跳到Level 4級別,即在特定的條件下,例如在城市的特定地區,車輛能夠完全自動駕駛。一些業內人士認為,Level 2級別和Level3級別這種不完全的自動駕駛是不安全的,因為即使系統控制了車輛,駕駛員仍然需要時刻注意,而駕駛員們很難做到這一點。
2016年5月,一輛特斯拉Model S撞上了一輛卡車,司機在事故中喪生,調查人員發現,盡管Autopilot系統已經發出警告,但司機仍然未能留意道路情況。特斯拉的Autopilot就屬于Level 2級別。
自動駕駛汽車的面臨的一個問題是,道路是為了人類司機而建的,自動駕駛汽車必須與之共享道路。人會通過燈光和使用其他非語言的提示進行交流,這些提示因地而異。自動駕駛的技術制造商Mobileye的CTO Amnon Shashua認為,自動駕駛車輛可能最終能夠適應周圍環境,例如,在波士頓開車就要比在加州猛一些。
自動駕駛汽車公司Aurora的CEO Chris Urmson說:“我們必須讓汽車能夠在像今天這樣的世界中運行。”
但將來,事情可能會變得容易些。在未來,可能會出現自動駕駛車輛專用的道路或區域,以及用于支持它們的專用設備,即V2I(車對基礎設備)技術。在一些已經有自動駕駛汽車運行的地區,已經對交通信號燈做了一些修改。未來,V2I和V2V(車對車)技術能夠幫助自動駕駛車輛更好地相互協調。
公眾似乎主要擔憂與自動駕駛汽車有關的兩種潛在風險:第一種就是他們應該如何面對道德困境。比如說,在撞到一群孩子和撞向另一輛車之間進行選擇。許多業內人士認為,這些問題并不能反映現實世界。
第二個擔憂就是網絡攻擊。自動駕駛汽車本質上是安裝在車上的計算機,可能會被遠程劫持和破壞。不過,自動駕駛業內的工程師們則堅持,他們非常重視網絡安全,他們所建立的多重冗余傳感器和控制系統,在技術上說,可以提供一定的安全保障。如果一輛自動駕駛車中的任何部分開始出現異常的行為,無論出于何種原因,這輛車都會停下來。Sapet開玩笑說:“想使用普通汽車殺人比使用無人駕駛汽車更容易。”
自動駕駛車輛很快就要進入我們的生活了,至少能在天氣良好、有序的環境中行駛。“一旦你找到了問題的關鍵,它就能漸漸被完全解決。” Urmson說。
從不可到可能,從可能到現實生活,盡管公眾仍有擔憂,但自動駕駛的發展速度,可以說是越來越快了。
-
自動駕駛
+關注
關注
783文章
13688瀏覽量
166157
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論