 步進電機、伺服電機、舵機三者的主要區別
步進電機、伺服電機、舵機三者的主要區別
有人說「伺服電機其實是個系統」,也有人說的「伺服電機確實就是電機」誰對呢?其實都不算錯。這里的區別主要在于如何定義電機。
如果從原理角度來看,只把最核心的定子轉子算作電機,那伺服電機當然是個系統,因為伺服控制電路是在電機之外的。如果從設備分類來看,整個外殼里面都算電機,那伺服電機就是個單獨的電機啦。
其實在工程上并不像做理論研究那樣需要特別嚴格的定義,至少在伺服電機到底是什么東西這點上,大家都是沒有分歧的,也不可能有人單獨拿一個不帶伺服電路的核心電機出來銷售吧。
現在就來說說這三者的主要區別。其實三者不是并列關系,因為步進電機和伺服電機是可以在功能上對比的;而舵機指的是伺服電機在航模、小型機器人等領域下常用的一個特殊版本,一般來說比較輕量、小型、簡化和廉價,并附帶減速機構。而步進電機和伺服電機本質上的最大區別在于,一個是開環控制,一個是閉環控制。
步進電機接收的是電脈沖信號,根據信號數量轉過相應的步距角。通俗來講就是你推一下,我動一下。動的角度就是步距角,是步進電機的固有屬性。假如步距角是15°,表示每接收一個脈沖電機就轉過15°。所謂開環,就是只管控制,不管反饋。
步進電機接收脈沖后轉動,但不保證一定能轉到。比如脈沖頻率過高或者負載較大,就會造成失步,也就是沒轉到位。所以說使用步進電機的場合,要么不需要位置反饋,要么在其他設備上進行位置反饋。比如模型小車的車輪、光驅的光頭、攝像機云臺,以及各種行業機械設備等。
步進電機一般長這樣:
內部結構則是這樣:
步進電機與普通直流交流電機的原理均不同,步進轉動靠的是定子線圈繞組不同相位的電流以及定子和轉子上齒槽產生的轉矩。而伺服電機則是閉環控制,即通過傳感器實時反饋電機的運行狀態,由控制芯片進行實時調節。
一般工業用的伺服電機都是三環控制,即電流環、速度環、位置環,分別能反饋電機運行的角加速度、角速度和旋轉位置。芯片通過三者的反饋控制電機各相的驅動電流,實現電機的速度和位置都準確按照預定運行。伺服電機能保證只要負載在額定范圍內,就能達到很高的精度,具體精度首先受制于編碼器的碼盤,與控制算法也有很大關系。
與步進電機原理結構不同的是,伺服電機由于把控制電路放到了電機之外,里面的電機部分就是標準的直流電機或交流感應電機。一般情況下電機的原始扭矩是不夠用的,往往需要配合減速機進行工作,可以使用減速齒輪組或行星減速器。伺服電機常用于需要高精度定位的領域,比如機床、工業機械臂、機器人等。
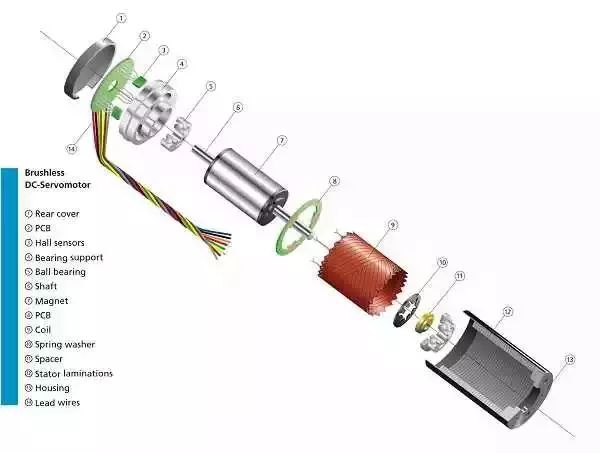
常見的伺服電機長這樣:(里面有三環控制電路)
內部結構是這樣:(這款是空心杯無刷直流電機)
而舵機則是國人起的俗稱,因為航模愛好者們最初用它控制船舵、飛機舵面而得名。伺服電機的英文是servomotor。舵機呢?有人也叫servomotor,有人簡稱為servo。大概就是「伺服電機」和「小伺伺」的關系吧。
從結構來分析,舵機包括一個小型直流電機,加上傳感器、控制芯片、減速齒輪組,裝進一體化外殼。能夠通過輸入信號(一般是PWM信號,也有的是數字信號)控制旋轉角度。由于是簡化版,原本伺服電機的三環控制被簡化成了一環,即只檢測位置環。
廉價的方案就是一個電位器,通過電阻來檢測,高級的方案則會用到霍爾傳感器,或者光柵編碼器。給模型用的舵機很多干脆就是塑料外殼加塑料齒輪組。比如著名的廉價舵機SG90,俗稱9g舵機(因為重量是9g):
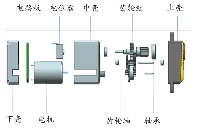
稍一拆解就看到里面是這樣的:
可以看到塑料齒輪組、電機、電位器、電路板等。隨著消費級小型機器人在近兩年的熱潮,小型輕量的舵機一下子成了最合適的關節元件。但機器人關節對性能的要求遠高于船舵,而作為商業產品也比DIY玩家對舵機質量要求高得多。
一些有追求的消費級機器人公司,會在六足全地形機器人HEXA上使用的19個舵機均使用了全鋁合金外殼、金屬軸承、鋼齒輪組。全是為了保證這個小東西被買回家后也能一直活蹦亂跳下去而不是玩幾天就壞掉。
不過這樣的舵機成本不低,同品質的在市場上至少需要150元,況且我們自己實現的不受力時進入省電模式、超靜音無抖動、360度無死角自由定位等特性,在其他舵機上根本是沒有的。
-
電位器
+關注
關注
14文章
993瀏覽量
66501 -
步進電機
+關注
關注
150文章
3041瀏覽量
146838 -
伺服電機
+關注
關注
85文章
2003瀏覽量
57298
原文標題:步進電機、伺服電機、舵機的主要區別
文章出處:【微信號:gongkongBBS,微信公眾號:工控網智造工程師】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦







 工商網監
工商網監
評論