 智能網聯下的平行駕駛與平行交通
智能網聯下的平行駕駛與平行交通
導讀:平行駕駛越來越受到各大科研機構和公司的重視,這也預示“平行駕駛”將引發新一輪熱潮。
自動駕駛發展到這個階段,目前面臨最大的挑戰就是上路問題了。而加州交管局DMV在今年三月份出臺的一項新規定“允許無人駕駛汽車在車內無駕駛員、安全員或測試員的情況下在公路上行駛,但需要車輛能夠遠程管控”,為解決這一難題提出了新的思路。這意味著無人駕駛汽車能夠由操作人員遠程監管并控制,實現真正意義上的「無人駕駛」。
遠程駕駛技術通過網絡通信的方式,把車端的感知數據傳輸給云端控制器,由人類駕駛員來遠程控制,如果汽車內部底層自動駕駛系統遇到問題,該技術將允許遠程操作人員接管車輛,可有效解決在業內被稱為機器 “邊緣”情況的難題。目前國內初創企業慧拓智能機器公司已經在中國智能車研發與測試中心(常熟)真實道路演示了由其自主研發的第三代平行駕駛系統,通過構建的平行駕駛管控中心能實時監控三臺無人駕駛汽車的行駛狀態。
▲慧拓搭載第三代平行駕駛系統的測試車
在6月26日開幕的第29屆國際智能車大會(IEEE IV 2018)上,慧拓智能機器公司CEO陳龍發表主題演講,詳細介紹了平行駕駛的框架、理論發展及應用。慧拓作為中科院自動化研究所王飛躍教授提出的平行駕駛理念的實踐者,以平行理論為基礎,主要進行的是新一代云端化智能網聯自動駕駛技術的研發和產業化。
智能網聯下的平行駕駛與平行交通
據了解,慧拓的平行駕駛系統是中科院自動化研究所王飛躍教授提出的平行駕駛理念的產業化嘗試與應用,目前在物流、礦山等限定場景開始初步測試應用。王教授在21世紀初提出了“平行駕駛”的框架,目的是為自動駕駛技術的落地提供一種安全、可靠、高效的實施方案,同時為自動駕駛中的車輛提供運營管理、狀態監測以及應急遠程接管等服務。
▲中科院自動化研究所王飛躍教授
在CPSS(Cyber-Physical-Social Systems)的理論框架下,王教授將駕駛員、車輛、信息這幾個組成部分,擴展對應到通過物理空間和信息空間耦合交互的三個世界:物理世界、心理世界和人工世界,形成了基于CPSS理論的“平行駕駛”。
他認為,未來物理的車將和軟件定義的汽車平行起來,物理的公路將和軟件定義的公路平行起來,以后車不是開在物理世界,而是開在物理世界、心理世界、人工世界三個世界里,實現的是知識自動化。我們靠知識自動化走向智能汽車,走向智能社會,走向智能產業。
在王教授構想的平行駕駛理論中,當人類司機駕著真實車奔馳時,作為“軟件機器人”的智能代理也開著對應的“虛擬車”同時在虛擬世界中奔馳。這種虛擬車,學術上稱為“人工車”或“軟件定義的車”,根據不同的要求在不同的程度上與真實車一一對應。而且,一部真實車可以有多部虛擬車與之相伴,有的隨車而行,有的存于家中、辦公室、服務中心、廠家或政府的檔案機構,或者各式各樣的網絡云端服務平臺之中。
利用這種方式,虛擬車可以用可視化的形式提供真實車的本體知識、歷史情況和實時信息;同時提供預測未來狀態和情境的計算能力或檢查事故原因的回溯計算功能;最終,還可以虛實互動,提供監視、控制、管理、服務真實車的各類功能。顯然,這種智能汽車技術的發展與應用前景幾乎是無限的。
在王飛躍教授看來,未來從L0-L5六個自動駕駛階段共存的場景中,需要一個無限安全的性能要求,需要去預測車輛行為,而這將涉及龐大的計算量。現有的本地計算能力仍十分有限,需要在云端進行復雜計算,同時還要在云端進行學習。有些車開得好,有些智能車做得比較差,就會在云端以好的方式讓差的無人車進行學習,最后達到比較安全、比較智能的一種出行方式。
從理論到實踐,“平行駕駛”理想照進現實
當然,這種平行駕駛的構想并沒有只停留在概念上。從2007年開始,王飛躍教授正式組織團隊開始了平行駕駛相關研究,而成立于2014年10月的青島慧拓智能機器有限公司是王教授平行駕駛理論的實踐者。
這家成立四年不到的初創公司以ACP平行理論為基礎,主要進行的是新一代云端化智能網聯自動駕駛技術的研發及產業化。目前慧拓的優勢在于平行感知、平行學習和智能網聯技術領域,產品集中在自動駕駛系統、平行駕駛管控機柜和平行應急系統,能夠進行無人駕駛、場景方案設計以及測評體系的搭建。
在今年的3月18日,慧拓智能發布了平行駕駛3.0系統。它的主要功能是“車端感知+云端管控”,是一套能夠遠程遙控無人駕駛車輛進行駕駛的系統,可實現一名遠程人工操作員控制數英里之外的多輛自動駕駛汽車,這一解決方案有望加速推動未來無人車商業化落地。
▲在常熟智能車中心演示平行駕駛技術的其中一輛測試無人車
而針對國際上首次提出的自動駕駛數字四胞胎的概念,即如何實現道路上混合車輛系統(有人駕駛、自動駕駛、無人駕駛)的安全平穩智能管理運行。慧拓也將此概念融入了平行駕駛系統的開發中。
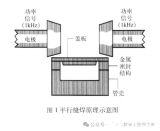
據了解,這套平行駕駛系統共分為平行駕駛管控系統、遙控駕駛系統(駕駛員模擬器)、無人駕駛系統(無人車)三部分。如圖所示,平行駕駛管控中心(C端)負責監控和引導無人車(A端)的運行,駕駛模擬器(B端)負責在請求或緊急情況下接管無人車(A端)。
▲平行駕駛系統組成
平行遙控無人駕駛的優點在于,管控中心可以同時監管多輛無人車,車載HMI也將同步顯示無人車與調度中心的通信連接狀態。無人車在路上行駛時,車內傳感器數據、無人車的位置信息以及多角度視頻數據會即時反饋給平行駕駛管控中心,由這個“云端大腦”來監控車輛的運行狀態。
慧拓CEO陳龍教授在演講中透露稱,在“平行遙控駕駛”下階段的演示中,慧拓將增加平行駕駛管控中心對無人車的引導功能演示。屆時,平行駕駛管控中心既能實時監控無人車狀態,又能同時進行“無人車決策”計算實驗,并將最優決策方案發送至無人車。未來一段時期會逐步完善優化平行駕駛系統,重點攻關整體系統功能安全的開發與測試,保證系統安全與可靠性。
在慧拓看來,第三代平行駕駛系統短期內首先能夠實現快速落地的場景在公交、物流、礦山、園區、停車場等區域。目前,北京、上海、重慶等地相繼出臺了關于自動駕駛車輛道路測試的試行辦法,杭州、長春、青島等地也在為自動駕駛汽車、智能網聯汽車建設測試道路和研發基地,大環境下良好的政策支持有望成為該系統展開大規模測試的機會。
美國麻省理工學院計算機科學與人工智能實驗室去年提出用平行技術實現駕駛自動化;今年5月份,英特爾也新設研究中心與中科院自動化研究所、清華大學共研車聯網、平行駕駛。平行駕駛越來越受到各大科研機構和公司的重視,這也預示“平行駕駛”將引發新一輪熱潮。
不過這種技術對通信網絡的帶寬、延時等要求很高,隨著5G技術商用方案的落地,平行駕駛系統有望得到廣泛應用,但如何降低整個系統的搭建成本,這也是可能制約該技術量產的一方面原因。陳龍教授表示,目前選擇礦山、物流等限定區域進行試點,主要也是考慮到這些場景相對簡單,能夠在現有的技術基礎上大幅提升工作效率。
-
網絡通信
+關注
關注
4文章
793瀏覽量
29761 -
無人駕駛
+關注
關注
98文章
4038瀏覽量
120309 -
自動駕駛
+關注
關注
783文章
13694瀏覽量
166168
原文標題:加速自動駕駛落地,這家公司把「平行駕駛」夢想帶入現實
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
智能網聯汽車全球十大技術趨勢發布

智能駕駛在城市交通中的應用
智能駕駛對交通安全的影響
自動駕駛的未來之路:智能網聯與單車智能的交融
智能網聯是否是自動駕駛落地的必要條件?
平行光源的優勢:解鎖精準檢測的新境界

電源紋波平行線法與靠測法的區別
影響平行板電容器電容的因素
平行電流線對羅氏線圈的影響

現代汽車、起亞與百度簽署智能網聯汽車戰略合作框架協議
特斯拉全新自動泊車功能上線,可平行泊車
淺談電極對平行縫焊質量的影響






 工商網監
工商網監
評論