 一種基于前饋控制的平均電流控制方案
一種基于前饋控制的平均電流控制方案
摘要:
在傳統平均電流控制電壓環路基礎上,提出了一種基于前饋控制的平均電流控制方案,電壓環加入負載前饋控制和電網電壓前饋控制,減小直流側電壓超調量;電流環采用誤差迭代PI算法,實現無靜差調節,優化三相VIENNA整流器的動態響應。所提出的負載前饋變量僅在負載階躍時更新,在穩態時保持恒定。另外,本文對頻域響應特性進行分析并通過仿真加以驗證。
0 引言
隨著半導體器件的飛速發展,高性能的整流拓撲也應運而生,VIENNA整流器由于其高效的三級結構而被提出,并廣泛應用于電動汽車、航空航天等要求功率因數較高且線路電流諧波失真較低的場合。
傳統平均電流控制穩定性好,電壓外環用于調節輸出電壓,電流內環按電壓外環輸出的電流指令控制狀態空間平均電感電流,使電流快速跟蹤電壓相位[1]。這種控制方案雖然可以獲得單位功率運行且總諧波失真較低,但是PI環節控制器運算量大,導致輸出電壓動態響應較差。當負載突增時,會導致輸出電壓偏移,甚至系統失穩。
目前,優化VIENNA整流器平均電流控制的動態性能的方法主要有以下幾種。文獻[2]提出一種新型的電流前饋平均電流控制模式,推導低通濾波器的增益來加快電壓環響應,但網側電壓不穩定時,濾波器的設置比較困難;文獻[3]采用直接功率控制提高了系統的動態性能,但是計算較為復雜;文獻[4]提出了基于擾動觀測器的前饋控制,在負載波動或是網側電壓波動時表現出良好的動態性能。
本文在傳統平均電流控制的基礎上加入前饋控制策略,進一步優化系統的動態性能。提出的前饋控制計算中需要對負載電流采樣,繼而求出前饋變量值。同時,采用誤差迭代PI算法代替傳統的PI算法,以實現電流內環無靜差調節。
1 傳統平均電流模式控制
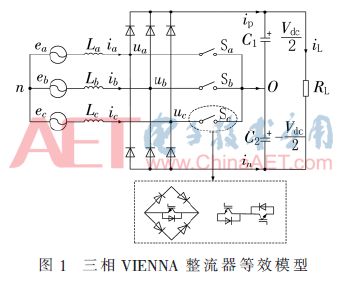
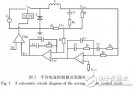
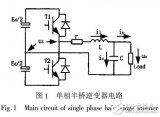
圖1為三相VIENNA整流器等效模型,功率器件僅承受一半輸出電壓,為高壓輸出提供了可能。傳統的平均電流控制框圖如圖2所示。圖中,輸出電壓u0與參考值 m,當負載變化時,um值也相應改變,以平衡輸入輸出功率。
m,當負載變化時,um值也相應改變,以平衡輸入輸出功率。
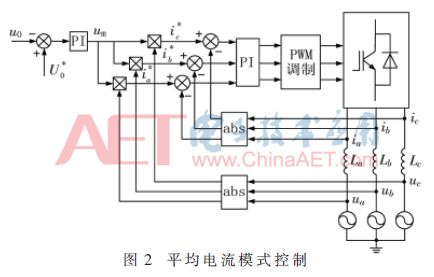
從暫態到穩態的持續時間取決于um的變化率。um變化率降低會導致負載階躍時系統從失衡狀態到穩態的持續時間較長。
2 基于前饋控制的平均電流控制
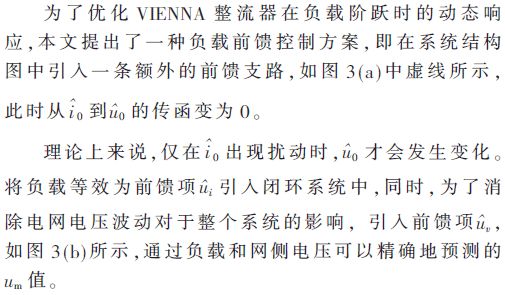
圖中,Zeq(s)為等效輸出阻抗,Gev(s)為PI調節器的傳遞函數,GDSP(s)為延時模塊,表達式如下:
2.1 前饋項的求解
假設VIENNA整流器工作在單位功率因數狀態下,且忽略交流側電感及整流橋自身損耗。
網側電流表達式如式(4)所示:
2.2 誤差迭代PI算法
為了克服傳統PI控制器跟蹤電流參考指令存在穩態誤差的缺陷,電流內環控制采用誤差迭代PI控制算法,保證輸出電流對參考電流的跟蹤誤差趨于0,以消除靜態誤差。
為了推導方便,直接摘錄文獻[9]中的簡化算法:

式中,ir(τ)為τ時刻的輸出電流, e(τ)為τ時刻的誤差采樣值。繼而,可求得誤差迭代PI算法中輸出到誤差采樣的傳遞函數:
由式(15)可見,閉環系統傳遞函數的幅值為1,相位移等于0,可以保證系統實現無靜差調節。
2.3 前饋控制策略
將前饋控制引入三相VIENNA整流器,以衰減因負載階躍導致的電壓u0過沖,控制方案如圖4所示。
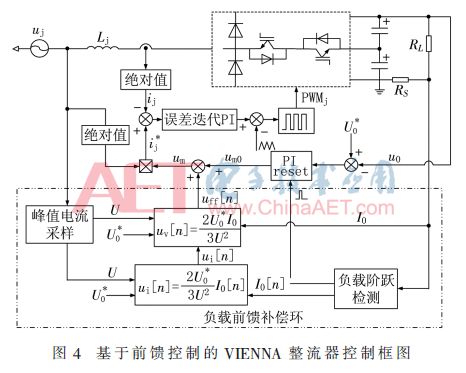
在不同的擾動情況下,前饋變量值uff[n]可以預測um的值,減小u0的偏移。當發生第n次負載階躍時,uff[n]可由式(16)預測:

然而,當um0添加到uff[n]后將會導致um預測出現偏差。為此,在檢測到負載階躍時需要清空um0的值,所以在脈沖信號之前需要添加一個檢測模塊。
2.4 負載階躍檢測
本文通過數字算法實現負載階躍檢測過程,如圖5所示。
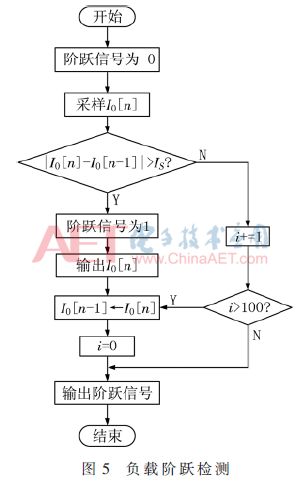
該數字算法流程圖相當于一個滯環比較器,為了防止預測出現偏差,需要保證系統只在負載階躍的時刻進行檢測。當I0[n]與I0[n-1]之間偏差超過Is時,便設置階躍信號,同時輸出I0[n]。另外,利用計數器作為檢測算法中的計時器,開關頻率為250 kHz,間隔頻率為100倍的開關頻率。
3 仿真分析
為了驗證所提出的的前饋控制方案的可行性,本文在Saber環境下搭建了基于前饋控制的VIENNA整流器仿真模型。配置系統的仿真參數為:網側交流輸入電壓220 V/50 Hz;輸出電壓360 V;開關管的開關頻率250 kHz;濾波電感90 μH;輸入電容225 μF。
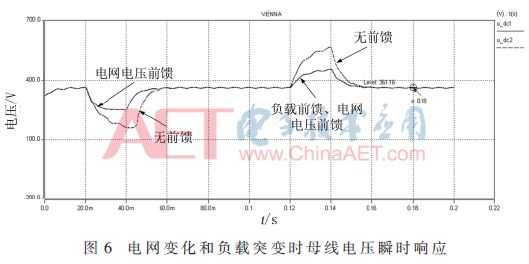
圖6為有前饋和無前饋作用下母線電壓的瞬時響應波形圖。20 ms時加入電網波動,0.12 s時加入負載突變。可見,加入前饋控制系統使得系統的動態性能顯著提高。
4 實驗驗證
根據上述控制策略及分析結果搭建了一臺基于TMS320F2808數字處理器的三相VIENNA整流器實驗樣機。
圖7為無前饋控制下,電網電壓從100%→60%→100%,繼而輸出側功率從2 kW→3 kW情況下輸出測的響應波形。圖8為加入前饋控制情況下響應波形。
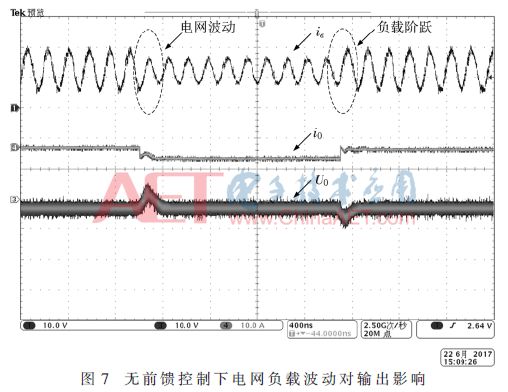
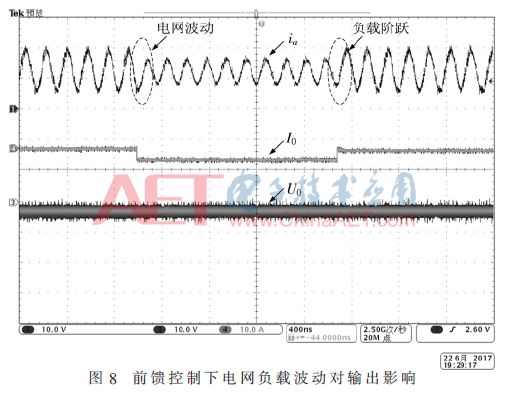
從圖中可以看出,與傳統的控制方式相比,帶有前饋補償控制策略的系統能在電網波動或負載階躍時及時響應,優化了系統的動態性能。
5 結論
本文在傳統平均電流控制電壓環的基礎上加入前饋補償環節,電流內環采用誤差迭代PI控制。設計負載檢測環節來保證只檢測負載階躍時刻。穩態和負載輕微波動的情況下,不會觸發負載前饋計算。由于計算過程僅發生在暫態,所以這種控制策略不會增加計算復雜度。仿真和實驗驗證了加入前饋控制可改善系統動態性能。
-
整流器
+關注
關注
28文章
1524瀏覽量
92350 -
濾波器
+關注
關注
160文章
7729瀏覽量
177690 -
電流控制
+關注
關注
4文章
141瀏覽量
23153
原文標題:【學術論文】基于優化前饋控制的VIENNA整流器動態性能研究
文章出處:【微信號:ChinaAET,微信公眾號:電子技術應用ChinaAET】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
帶有前饋補償器的ACOT?控制降壓轉換器的輸出直流偏移計算
永磁同步電機偏差解耦和電流前饋解耦控制比較

一種平均電流控制型開關調節系統的建模

一種帶輸出電流前饋的PI雙環數字化控制方案
飛機機翼噴漆機器人精確動態前饋控制的實現方法詳細資料說明





 工商網監
工商網監
評論